
A Survey on Monitoring of Wild Animals during Fires Using Drones




1
Natural Nutraceutical Biotesting Laboratory, Kemerovo State University, Krasnaya Street 6, 650043 Kemerovo, Russia
2
Department of General Mathematics and Informatics, Kemerovo State University, Krasnaya Street 6, 650043 Kemerovo, Russia
3
Laboratory of Biocatalysis, Kemerovo State University, Krasnaya Street 6, 650043 Kemerovo, Russia
4
Department of Zoology, Russian State Agrarian University—Timiryazev Moscow Agricultural Academy, Timiryazevskaya Street 49, 127434 Moscow, Russia
*
Author to whom correspondence should be addressed.
Fire 2022, 5(3), 60; https://doi.org/10.3390/fire5030060
Submission received: 8 April 2022
/
Revised: 25 April 2022
/
Accepted: 26 April 2022
/
Published: 29 April 2022
(This article belongs to the Section Fire Science Models, Remote Sensing, and Data)
Abstract
:Forest fires occur for natural and anthropogenic reasons and affect the distribution, structure, and functioning of terrestrial ecosystems worldwide. Monitoring fires and their impacts on ecosystems is an essential prerequisite for effectively managing this widespread environmental problem. With the development of information technologies, unmanned aerial vehicles (drones) are becoming increasingly important in remote monitoring the environment. One of the main applications of drone technology related to nature monitoring is the observation of wild animals. Unmanned aerial vehicles are thought to be the best solution for detecting forest fires. There are methods for detecting wildfires using drones with fire- and/or smoke-detection equipment. This review aims to study the possibility of using drones for monitoring large animals during fires. It was established that in order to use unmanned aerial vehicles to monitor even small groups of wild animals during forest fires, effective unmanned remote sensing technologies in critical temperature conditions are required, which can be provided not only by the sensors used, but also by adapted software for image recognition.
1. Introduction
Forests cover 31% of the total land area and serve as a reservoir for biodiversity genes [1]. A sound forest management system increases sustainability and combats global warming [2]. The intensity and number of forest fires increase significantly every year. However, fires can cause significant material damage and lead to the death of people and animals [3]. In recent decades, forest fires, mainly ones caused by human activities, have become more frequent [4]; they pose a threat to forests around the world. This current increase is associated with global warming and an alarming global deforestation rate. The surge in droughts and temperatures related to global climate change will increase the frequency of fires in the near future [5].
In 2018, almost 9 million acres were burned in the United States alone [6]. In January 2019, another devastating wildfire broke out in the Amazon rainforest. As a result of this forest fire, about 906,000 ha of land was impacted. Between September 2019 and early January 2020, a series of major fires in New South Wales and Victoria in eastern Australia burned about 5.8 million hectares of mostly temperate broadleaf forests. This has been called Australia’s Black Summer [7]. About three billion terrestrial vertebrates, the vast majority of which were reptiles, were affected, and some endangered species were forced to flee their habitats. At its peak, air quality in the surrounding areas dropped to dangerous levels in all southern and eastern states [8]. Many fires exceeded 100,000 hectares and continued to burn for several weeks after they ignited.
Uncontrolled fires often occur by accident due to careless human actions and lead to the degradation of forests as habitats. Over the past ten years, an average of 67,000 forest fires per 7.0 million acres have occurred in the world annually [3]. In many cases, fire is an important component of the ecosystem that ensures the sustainability of processes and communities. However, not all fires are the same, and ecosystems can change irreversibly due to the impact of fires of different nature and frequency [9].
Often, the direct impact of open fire on wildlife is insignificant. Only during significant fires do large wild animals and/or humans die. The indirect impact of fires is often more significant. For example, a crown fire causes serious changes in the structure of the forest and leads to the destruction of all elements of the fauna that defined the forest habitat before the fire.
The territories after the fire are populated with a new set of species. The size and configuration of habitats after a fire affect the metapopulation structure and composition of animals through local disappearance and repopulation of these areas by other animal species [10].
It is known that the most destructive impact on the fauna of forests is caused by fires that are the result of anthropogenic impact on the forest structure. For example, in Sumatra, Indonesia, according to primary forest experts, many animals such as squirrels, some species of primates, and some species of birds have completely disappeared not only from the territory of the burned forest but also from adjacent forest areas [11].
The forests of Russia (which account for a fifth of the world’s forests and half of the world’s coniferous plantations) are vital to the global environment, for this reason, forest reserves occupy a significant part of it (about 70% of all territories). The lack of full statistical data on the number of forest fires by year does not allow for making a legitimate forecast in general [12].
Fires are better prevented than extinguished, both physically and financially. However, in Russia, not infrequently, there is no timely information about a fire source in nature, primarily due to the insufficiently developed forest surveillance system. For this reason, extensive damage is caused to the country’s forest complex annually due to the negative effects of fires on the wildlife ecosystem; economic losses amount to billions of rubles a year [13,14,15].
There are many ways to measure economic impact, but measuring environmental impact is very difficult [16]. Fires can affect animals in different ways.
The indirect impact of fires, destruction or damage to animal biotopes causes more evident and irreversible changes in the forest fauna. The destruction of vegetation and the change in fauna disturb the balance of the microenvironment, and the local natural environment is changing [17]. For example, controlled fires are widely used to improve the availability of food for herbivores such as elk (Alces alces), bison (Bison bison), mule deer (Odocoileus heminonus), and bighorn sheep (Ovis canadensis). Understanding how elks react to fire has allowed determining how forest fires affect the habitat of ungulates in the study area [18].
As the climate warms and rainfall cycles change, an increase in the frequency, intensity, and duration of forest fires will increase the threat to humans and wildlife populations [19,20]. Climate change has a significant impact on herbivore movement and distribution over the terrain [21]. As a result of climate warming and permafrost thawing, not only did tree plantations migrate north, but so did elks [22].
This manuscript aims to study the possibility of using drones for monitoring large animals during fire, to which it is customary to classify those with the largest quantitative parameters of ontogenesis (weight, length, height, and so on) [23]. The issues of using drones in environmental monitoring, as well as early detection and elimination of forest fires, are considered. The lack of developed approaches and methodologies for searching and monitoring wild animals during a fire, based on adapted technologies for monitoring wild animals or fires, prevents drones from being used to their full potential in emergency situations.
2. Using Drone Technology to Monitor Wild Animals
Ground-based fire monitoring systems are triggered by flames and smoke. However, often cameras installed on the ground or on a watchtower do not identify an open fire in the forest in a timely manner. Autonomous drones or unmanned aerial vehicles [24] allow a more rapid detection of fire, even in areas that are difficult to reach or dangerous during a fire. A wide circumference of the observation area can be provided by drones with fixed or movable wings, but they are sensitive to weather changes and are limited in flight time. As a rule, drones are equipped with high-resolution cameras, IR cameras with a charge-coupled device for obtaining images, and navigation sensors (GPS receivers and inertial measurement units) [25].
Regular monitoring of wild animals is necessary to assess population dynamics depending on possible climate changes, human activity, and other factors [26,27]. However, difficulties arise when observing wild animals in large natural territories due to the remoteness of these territories from civilization and the need to search for individual species on them [28]. The population size and structure are managed by traditional monitoring methods (using ground-based observations) [23,29,30].
While standard field data, collected on thousands of sample squares or sections, are accurate, collecting such data is laborious, time-consuming, and costly, and survey regions are often difficult to access from the ground. The limited number of field study samples limits the monitoring accuracy of large-scale animal studies. Ground methods result in significant bias since only disturbed landscapes are investigated. In this case, the collection of data on animals is subjective, and in the case of, for example, waterfowl, it is difficult [31]. Various methods have been developed to observe wild animals from satellites, manned aircraft, and drones [32].
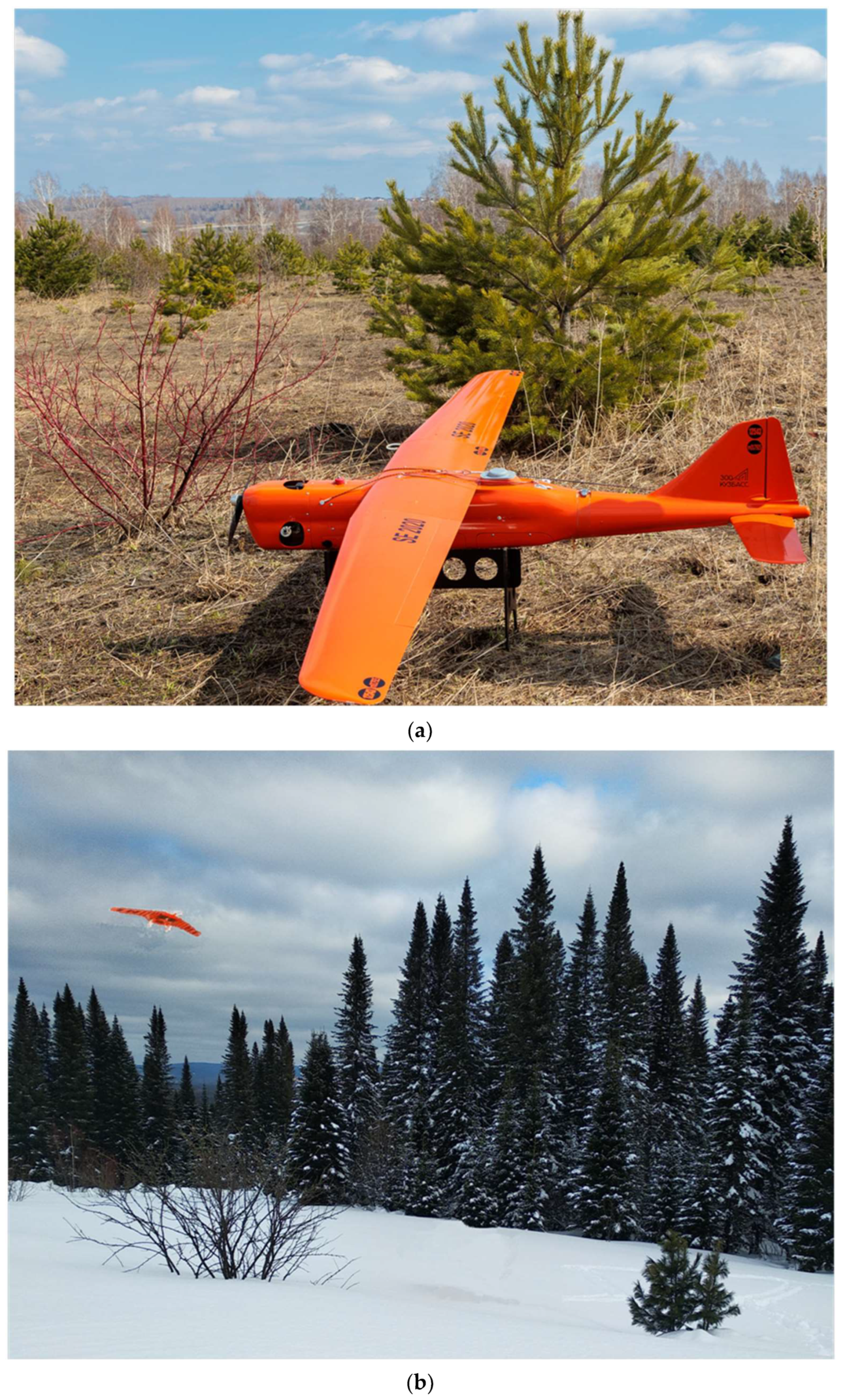
Recently, drones have been used to calculate the number, observe, and determine the characteristics (body size and behavior features) of animals [33,34]. Sometimes, large unmanned aerial vehicles (for example, ScanEagle) are used for long-distance flights (up to 100 km) and long-time flights (more than 24 h) [35]. Fixed-wing drones are more often used, while multicopters are slightly less common. Airships and aerostats are not used for wildlife monitoring due to their low mobility. Fixed-wing unmanned aerial vehicles are used to observe wild animals (roe deer, red deer, wild boar, elephant, etc.) due to their characteristics, such as safe altitude (>100 m) and long duration of flight over long distances [36,37]. In a marine environment, fixed-wing drones are much less constrained in terms of safe flight altitude, and the sensor power determines which species can be detected at a given altitude [35]. The main limiting factors for the use of large fixed-wing drones include the need to use a runway or ramp for their launch (Figure 1). Low cost and excellent maneuverability characteristics (vertical takeoff and landing) even on small flat areas make the use of multicopters so widely spread. Multicopters are easily controllable and easily fixed in flight for filming in any orientation. Mostly, quadrocopters or hexacopters are used in research, and only one octocopter has been described [38]. Moreover, quadrocopters significantly outperform other multicopters in terms of price and dimensions. These characteristics determine their popularity when observing birds, which should be observed from a higher altitude and are sensitive to any extraneous objects in their environment (drones, human impact, etc.).
Accessibility and ease of use of drones (unmanned aerial vehicle, aircraft and systems or remotely piloted) equipped with devices (cameras and sensors) make it possible to quickly and cheaply survey large areas. Surveying with optical (RGB) cameras mounted on drones can effectively detect animals in open, homogeneous regions where the animals are not disguised. The emission of light that comes directly from sources, rather than is reflected, increases the potential for the use of drones with IR cameras. In homeothermic endotherms, the surface temperature of the animal (skin or fur) is higher than the ambient temperature [39]. With long MDP waves, the animal looks like a bright glowing object. Unlike RGB cameras, which practically do not recognize images at night, IR cameras can be used at any time of the day. This is especially relevant in monitoring poaching and when observing nocturnal animals and birds.
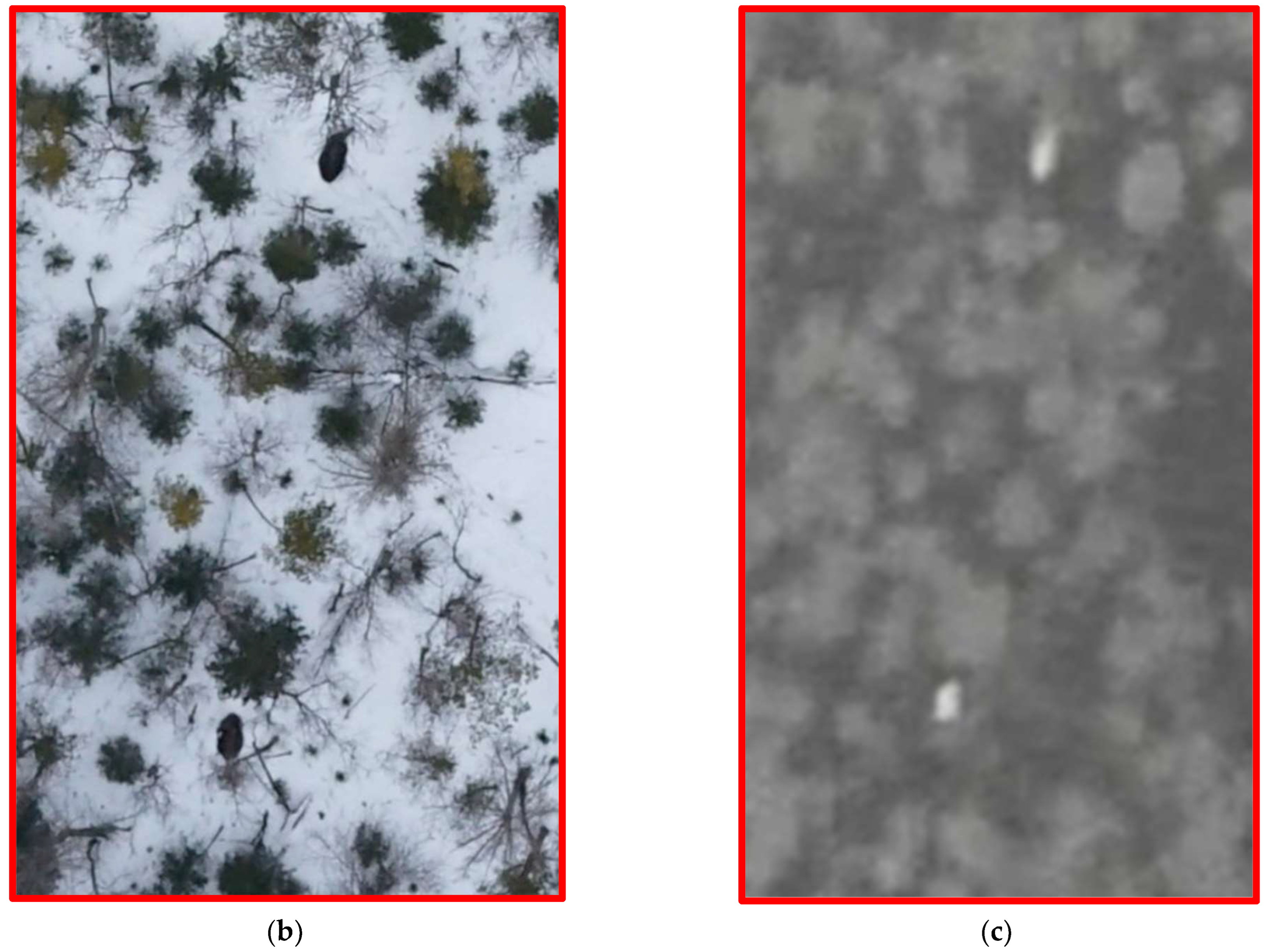
However, not everything is that simple. Hodgson et al. [35] studied the effectiveness of such studies by counting life-size copies of seabirds arranged in groups in open spaces with a clear contrast with the environment. When the counted number of bird replicas was compared between the numbers obtained from drone imagery and ground imagery, drone counts were significantly more accurate [35,38]. We have obtained similar results in our wildlife monitoring studies (Figure 2, Table 1). We used an aircraft-type drone “Supercam S250” (LLC “Unmanned Systems”, Izhevsk, Russia) with a wingspan of 2.53 m (flight time—up to 3 h; flight range—up to 180 km; speed—from 65 to 120 km/h; permissible distance from the operator (radio line range of action)—50–70 km; flying height—from 50 to 500 m; permissible wind speed up to 15 m/s, air temperature from −50 °C to +45 °C, moderate precipitation (rain and snowfall) is possible) with cameras and a thermal imager, and for image processing we used the Thermal infrared object finder (TIOF) software developed by the staff of the KemSU Institute of Digitalization. Thermal imaging is reliable enough to determine the very fact of the presence of an animal provided that there is a significant difference in the temperature of the animal’s body and the environment (up to 30–40 °C), but it does not allow to distinguish species with similar mass and geometry of bodies. Adapted algorithms are required in this case to identify individuals of a specific species (Figure 3).
3. Use of Drones for Monitoring and Detecting Fires
The current world’s environmental problems have never been so global and significant. Wild woodlands are subject to destruction from natural disasters, the scale and intensity of which have increased significantly in recent years. The most dangerous natural phenomenon is a large-scale forest fire that changes the life and climate of an entire region. In order to minimize the harmful effects of fires on nature and humanity, it is necessary to carefully plan and coordinate measures aimed at prevention. Affecting both local and global ecosystems, the latter cause serious damage to infrastructure and lead to deaths, the reduction of which is possible by timely detection of fire and accurate monitoring of its characteristics (type, degree, and scale) [40].
Early detection of a fire and/or monitoring of areas with increased risk of fire allows if not prevents, then at least mitigates, the destructive impact of fires [41]. The traditional approach of detecting forest fires using human observation from fire towers (with primitive devices) is ineffective and its accuracy is determined by the human factor. Fire sensors configured to detect smoke, flame, temperature rise, and gas demonstrate a delayed reaction due to the need for their activation by appropriate particles. To monitor large areas, a significant number of such sensors are required due to the limited radius of their action [42].
Recently, new tools based on machine vision, computer learning, and remote sensing technologies for detecting and monitoring forest fires have been emerging. The advancement of microelectronics and new materials allows for greater efficiency in detecting forest fires with appropriate sensors. Detection technologies [43] and methods of video recording and transmitting information about flames and/or smoke in the visible and/or infrared (IR) range and other systems [44,45,46,47] are the main directions of the development of forest-fire monitoring technologies.
Nixon and Aguado [48] presented the results of the study of forest fire detection systems using remote sensing in combination with classification and digital image processing techniques. The study discusses three categories of systems used (ground, air, and satellite) that detect and/or track active fires or areas with smoke in real or near real time. Such systems use machine learning methods for processing data from various sensors in the visible, infrared, or multispectral range. Basically, early detection systems consist of ground-based sensor networks and/or individual sensors with different characteristics. For early detection of an open fire, two types of cameras (optical and infrared) are used, the range of which is from low to ultra-high resolution, depending on the differences in the scenarios of detected fires, 20IR sensors measure and transmit thermal radiation, while cameras provide a color image of the object [49].
Drones are thought to be the best option for solving the problem of detecting forest fires. In particular, Yuan et al. [50] used median filtering for noise reduction color analysis based on the CIELAB color space, Otsu threshold for fire segmentation, and blob counting to detect and track forest fires. The strategy of covering and mapping large areas using unmanned aerial vehicles has shown to be effective in monitoring and evaluating large areas, such as fires in rural areas [51]. A camera on a drone and machine vision algorithms [52] allow detecting and classifying agricultural crops, confirming the value of such tools when monitoring both rural areas and forests, including the case of fires [53]. Recently, systems combining both cameras and IR sensors have been used. Algorithmic approaches allow processing large amounts of data with a given level of accuracy with a minimum frequency of false positives.
There are several methods for detecting forest fires, including having one or more drones scan its territory with equipment that can detect either fire and/or smoke (Figure 4). Yuan et al. [54] described the results of the use of unmanned aerial vehicles with on-board surveillance systems for monitoring and detecting forest fires, focusing on pattern recognition algorithms. A system consisting of several drones was used at the first stage to search for and detect fires and at the second stageto teach how to perform fire extinguishing tasks [55]. Merino et al. [56] presented the results of the development of methods for using a group of unmanned aerial vehicles to obtain images of a forest fire in real time (for monitoring and forecasting the spread of fire). Zharikova and Sherstyuk [57] gave the results of using a group of drones for patrolling and observing fire. Imdoukh et al. [58] presented the results of a study of an unmanned aerial vehicle made of fire-resistant materials capable of extinguishing a fire with a fire extinguisher and searching for victims using a direct view of the environment by cameras. One of the trial stages of the drone controlled by the operator were carried out indoors. This made it possible to quickly obtain the necessary information about the environment and use it in the process of extinguishing a fire. Quadcopters (equipped with inertial navigation systems, GPS, HF transceivers, and cameras) flew around the expanding perimeter of the fire and were used as fire front-detection systems [59].
Several drones could interact with each other to automatically cover a forest-fire zone to obtain a complete picture of the fire spread [60]. Pham [61] proposed a distributed control structure designed for a drone team that can closely monitor and accurately track a wildfire in open space. McKenna [62] described the analysis of high-spatial-resolution drone images to estimate the severity of a fire through experiments in Central Queensland, Australia. Lee [63] presented a deep convolutional neural-network-based forest-fire detection system that uses drones to achieve high accuracy over a wide range of aerial imagery.
The main advantages of employing drones for fire detection, according to all authors, are operator safety and dynamic mobility, and they all agree that the quality of incoming data is mostly influenced by the utilized and/or adapted pattern recognition algorithms.
4. Using Drone Technology to Monitor Wild Animals during Fires
Ecological features of species, environmental conditions (both biotic and abiotic factors), and stages of the life cycle determine the types and patterns of movements performed by wild animals [64]. It is known that different goals (daily search for food, settlement and movement within the home range, migration over considerable distances, etc.) determine the differences in the movement of animals in space and time [65].
Movement is especially important in environments that are subject to periodic changes, such as those with frequent fires. By burning plant material, fire discards the succession processes, changing the composition and structure of vegetation. During recovery after a fire, both the structure and composition of vegetation and the characteristics of resources (type, quantity and availability of shelters, and food and habitat) are changing [66]. Thus, the dynamic nature of fire-prone landscapes prioritizes mobility strategies that increase the chances of individual and population resilience. The initial movement of animals is associated with the need to prevent burns during a fire [67], and later with the search for resources in the process of vegetation recovery after a fire. Landscape features (composition, area, spatial configuration of sites, and frequency and intensity of fires throughout the landscape) caused by fires determine the risk and ease of movement of populations in the future [68].
It is known that spatial data obtained by digital technologies lack detail at small spatial scales. Because of this, there is often a discrepancy between the spatial movement of the animal and the scale of the territories in which fire data are collected. Earth observation imagery is used to map the extent of forest fires, resulting in spatial scale differences for two reasons. First, the burned-out area can be displayed as one continuous area, assuming that the intensity of forest fires and the heterogeneity are identical. Secondly, the resolution of standard satellite sensors is in the range from 15 to 4000 m. Sensors with high spatial resolution (from 1 to 5 m) are usually quite expensive for research (USD 20/km). For small animals, unburned habitats over a larger burned territory may not be identified, and, for this reason, important patterns of movement between them are not be taken into account. It would be ideal if there was access to high-resolution maps (from 1 to 5 m) and data sets on the scale of fires [69].
Drones for high-resolution aerial photography, new free web platforms (Google Earth and Google Earth Engine), and other advances in similar technologies allow researchers to access high-precision spatial data [70]. Maps and data sets are needed not only to understand the patterns of movement of animals in an environment prone to fires, but also to identify differences in fires in different territories, determine shelters within burned areas, as well as determine the minimum required areas for different breeds of animals.
In most cases, drones used in monitoring tasks are equipped with high-definition cameras. The use of drones equipped with thermal imaging devices is the second most common practice for wildlife protection. Thermal imagers in drones are used from finding songbirds’ nests to studying incomprehensible wildlife phenomena [71]. In order to achieve the best conditions during the operation of thermal imaging cameras, certain conditions must be observed (cold days, night or early morning) to ensure a contrast between the temperature of the animal and its environment. There are other limitations when using thermal imaging equipment, false alarms on inanimate objects in the landscape (for example, stones heated in the sun) are possible; animals are not detected if their thermal radiation is limited (for example, by dense vegetation or dense cover). Thermal imagers are not the only equipment used in drones [49]. Cameras with fixed sensorsl follow the scene whenever a fire component is detected, activating the remaining modules to avoid danger. This system aims to save both wild animals and plants [72].
Traditional methods of direct ground observation of the movement of small animals have led to an understanding of the patterns of these processes when the landscape changes. The influence of vegetation type on the tortuosity of marsupial didelphids in the Brazilian Atlantic Forest [73] helped to study data from reel-and-line devices, and Kay et al. [74] used a fluorescent pigment to quantify the effect of grass height on the perception range of geckos and to track their small-scale movements. Thus, proven methods and technologies for the use of drones with specialized equipment (Table 2 and Table 3) can be used in areas prone to fires. Quantifying the ranges of perception using these methods can be especially important for understanding infrequent movements in fire histories, including evaluating signals for emigration.
Van Moorter et al. [80] used cluster analysis to classify the movement (within the plot, between plots, foraging, and resting and feeding) of elks (Cervus canadensis) into four types: movement between sites, finding food within a site, resting, and feeding between sites. Connecting the location and direction of movement to the statistics of fires allows to assess the routes of movement of animals in different wildfire scenarios. GPS telemetry was used in southeastern Australia to determine the path of possums (Trichosurus cunninghamii) moving in space and time when procuring food in the gorges of tropical forests after fire (unburned, partially burned, and severely burned landscapes) with a moderate climate, [81], and GPS tracking was used to track the hunting movements of wild cats in the direction of the recent forest fires [82]. This approach can be used to study changes in animal behavior to reveal whether certain behaviors occur during specific periods of a fire, such as individuals using some fire stories to search for food and others looking for a shelter that serves as reliable protection in the conditions of this landscape. A complete picture of the behavior of migrating animal populations in areas with a high probability of fires, including identifying the presence of an influence on the behavior of individuals after fire events (during wintering, stops, breeding, etc.), can be revealed by combining data obtained as a result of observing animals during the period without fires [83].
We could not find any information about the use of drones or remote sensing to monitor animals during a fire in open sources. This makes sense. When a forest fire becomes a natural disaster, there are more pressing concerns than animal rescue. No one risks human lives to save animals. Even equipment, including drones, is vulnerable in high temperatures and can only operate at a considerable distance, which reduces the effectiveness of animal monitoring. Drones equipped with proven technologies for monitoring both fires and wildlife are more than useful in other stages (such as during the initial stages of ignition or after the fire has been extinguished). However, the advantages of used thermal monitoring methods may be rendered nearly useless not only during fire but also after that. The ambient temperature is a more important indicator than the body temperature of the animal, especially burnt ones. It is crucial to adapt existing methods and develop specialized algorithms for pattern recognition in such conditions [84].
5. Conclusions
Forest fires damage forest ecosystems and the environment, thereby changing the global climate. Proper monitoring and understanding of forest fires both in space and time helps manage forests and helps protect biodiversity and wildlife habitats. Satellite remote sensing and GIS help visualize the magnitude and damage from forest fires at different scales and time periods.
Detecting animals from webcam images has become a promising technology that is currently being used. One of the main applications of drones related to nature monitoring is animal counting, and the use of drones is often a more accurate method than ground research. Drones that provide more effective remote sensing and dynamic monitoring of even small groups of wild animals during forest fires can become an alternative to manned aircraft used for aerial and ground surveillance of wildlife. The development of adaptive algorithms for pattern recognition that can be used in case of fire requires time and money.
Author Contributions
Conceptualization, S.I.; methodology, S.I. and A.P.; analysis and interpretation of the data, S.I.; formal analysis, A.P.; writing—original draft preparation, S.I. and A.P.; writing—review and editing, A.K.; project administration, A.K. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the Ministry of Science and Higher Education of the Russian Federation, agreement No. 075-15-2021-694 (contract identifier RF-2296.61321×0032).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Data are contained within the article.
Conflicts of Interest
The authors declare no conflict of interest.
References
- The State of the World’s Forests, 2020. Available online: https://www.fao.org/state-of-forests/en/ (accessed on 5 March 2022).
- Mangani, A. When does print media address deforestation? A quantitative analysis of major newspapers from US, UK, and Australia. For. Policy Econ. 2021, 130, 102537. [Google Scholar] [CrossRef]
- Fathima, S.K.; Velammal, B.L.; Shanmugam, K.; Jayareka, K.S. Anintegrated Iot based Approach Enabled in UAV for the Early Prediction of Forest Fires. Ann. Rom. Soc. Cell Biol. 2021, 25, 11042–11054. [Google Scholar]
- Lewis, S.L.; Edwards, D.P.; Galbraith, D. Increasing human dominance of tropical forests. Science 2015, 349, 827–832. [Google Scholar] [CrossRef] [PubMed]
- Juárez-Orozco, S.M.; Siebe, C.; Fernández, D. Causes and effects of forest fires in tropical rainforests: A bibliometric approach. Trop. Conserv. Sci. 2017, 10, 1–14. [Google Scholar] [CrossRef]
- Wildfire Statistics. Available online: https://sgp.fas.org/crs/misc/IF10244.pdf (accessed on 2 March 2022).
- Abram, N.J.; Henley, B.J.; Gupta, A.S.; Lippmann, T.J.; Clarke, H.; Dowdy, A.J.; Boer, M.M. Connections of climate change and variability to large and extreme forest fires in southeast Australia. Commun. Earth Environ. 2021, 2, 1–17. [Google Scholar] [CrossRef]
- Boer, M.M.; de Dios, V.R.; Bradstock, R.A. Unprecedented burn area of Australian mega forest fires. Nat. Clim. Chang. 2020, 10, 171–172. [Google Scholar] [CrossRef]
- Aponte, C.; de Groot, W.J.; Wotton, B.M. Forest fires and climate change: Causes, consequences and management options. Int. J. Wildland Fire 2016, 25, 1–2. [Google Scholar] [CrossRef]
- Pons, P.; Clavero, M. Bird responses to fire severity and time since fire in managed mountain rangelands. Anim. Conserv. 2010, 13, 294–305. [Google Scholar] [CrossRef]
- Bond, W.J.; Keane, R. Fires, ecological effects of. In Reference Module in Life Sciences; Elsevier: Amsterdam, The Netherlands, 2017. [Google Scholar] [CrossRef]
- Environmental Protection in Russia. Available online: https://rosstat.gov.ru/folder/210/document/13209 (accessed on 7 March 2022).
- Bartenev, I.M.; Malyukov, S.V.; Gnusov, M.A.; Stupnikov, D.S. Study of efficiency of soil-thrower and fire-break majer on the basis of mathematic simulation. Int. J. Mech. Eng. Technol. 2018, 9, 1008–1018. [Google Scholar]
- Kasymov, D.P.; Fateyev, V.N.; Zima, V.P. Methods and devices used in the wildfire localization for the protection of forest ecosystems. In Proceedings of the 23rd International Symposium on Atmospheric and Ocean Optics: Atmospheric Physics, Irkutsk, Russia, 3–7 July 2017; p. 1046664. [Google Scholar] [CrossRef]
- Mell, W.E.; Manzello, S.L.; Maranghides, A.; Butry, D.; Rehm, R.G. The wildland–urban interface fire problem–current approaches and research needs. Int. J. Wildland Fire 2010, 19, 238–251. [Google Scholar] [CrossRef]
- László, F.; Rajmund, K. Characteristics of forest fires and their impact on the environment. AARMS—Acad. Appl. Res. Mil. Public Manag. Sci. 2016, 15, 5–17. [Google Scholar]
- DeMars, C.A.; Serrouya, R.; Mumma, M.A.; Gillingham, M.P.; McNay, R.S.; Boutin, S. Moose, caribou, and fire: Have we got it right yet? Can. J. Zool. 2019, 97, 866–879. [Google Scholar] [CrossRef]
- Singer, F.J. Habitat partitioning and wildfire relationships of cervids in Glacier National Park, Montana. J. Wildl. Manag. 1979, 43, 437–444. [Google Scholar] [CrossRef]
- Flannigan, M.D.; Krawchuk, M.A.; de Groot, W.J.; Wotton, B.M.; Gowman, L.M. Implications of changing climate for global wildland fire. Int. J. Wildland Fire 2009, 18, 483–507. [Google Scholar] [CrossRef]
- Climate Change 2022: Impacts, Adaptation and Vulnerability: The IPCC Sixth Assessment Report. Available online: https://report.ipcc.ch/ar6wg2/pdf/IPCC_AR6_WGII_FinalDraft_FullReport.pdf (accessed on 7 March 2022).
- Tape, K.D.; Gustine, D.D.; Ruess, R.W.; Adams, L.G.; Clark, J.A. Range expansion of moose in Arctic Alaska linked to warming and increased shrub habitat. PLoS ONE 2016, 11, e0152636. [Google Scholar] [CrossRef]
- Anderson, K.L. Effects of Fire on Diet Composition, Foraging Behavior, and Nutritional Status of Moose in South-Central and Interior Alaska. Master’s Thesis, University of Alaska Anchorage, Anchorage, AK, USA, 2020. [Google Scholar]
- Prosekov, A.; Kuznetsov, A.; Rada, A.; Ivanova, S. Methods for Monitoring Large Terrestrial Animals in the Wild. Forests 2020, 11, 808. [Google Scholar] [CrossRef]
- Joyce, K.E.; Anderson, K.; Bartolo, R.E. Of Course We Fly Unmanned—We’re Women! Drones 2021, 5, 21. [Google Scholar] [CrossRef]
- Barmpoutis, P.; Papaioannou, P.; Dimitropoulos, K.; Grammalidis, N. A review on early forest fire detection systems using optical remote sensing. Sensors 2020, 20, 6442. [Google Scholar] [CrossRef]
- Smyser, T.J.; Guenzel, R.J.; Jacques, C.N.; Garton, E.O. Double-observer evaluation of pronghorn aerial line-transect surveys. Wildl. Res. 2016, 43, 474–481. [Google Scholar] [CrossRef]
- Ivanova, S.; Prosekov, A.; Kaledin, A. Is Ecotourism an Opportunity for Large Wild Animals to Thrive? Sustainability 2022, 14, 2718. [Google Scholar] [CrossRef]
- Rey, N.; Volpi, M.; Joost, S.; Tuia, D. Detecting animals in African Savanna with UAVs and the crowds. Remote Sens. Environ. 2017, 200, 341–351. [Google Scholar] [CrossRef] [Green Version]
- Norouzzadeh, M.S.; Nguyen, A.; Kosmala, M.; Swanson, A.; Palmer, M.S.; Packer, C.; Clune, J. Automatically identifying, counting, and describing wild animals in camera-trap images with deep learning. Proc. Natl. Acad. Sci. USA 2018, 115, 5716–5725. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Leyequien, E.; Verrelst, J.; Slot, M.; Schaepman-Strub, G.; Heitkönig, I.M.A.; Skidmore, A. Capturing the fugitive: Applying remote sensing to terrestrial animal distribution and diversity. Int. J. Appl. Earth Obs. Geoinf. 2007, 9, 1–20. [Google Scholar] [CrossRef]
- Dulava, S.; Bean, W.T.; Richmond, O.M.W. Environmental reviews and case studies: Applications of unmanned aircraft systems (UAS) for waterbird surveys. Environ. Pract. 2015, 17, 201–210. [Google Scholar] [CrossRef]
- LaRue, M.A.; Stapleton, S.; Anderson, M. Feasibility of using high-resolution satellite imagery to assess vertebrate wildlife populations. Conserv. Biol. 2017, 31, 213–220. [Google Scholar] [CrossRef]
- Olivares-Mendez, M.A. Towards an autonomous vision-based unmanned aerial system against wildlife poachers. Sensors 2015, 15, 31362–31391. [Google Scholar] [CrossRef]
- Christiansen, F.; Dujon, A.M.; Sprogis, K.R.; Arnould, J.P.; Bejder, L. Noninvasive unmanned aerial vehicle provides estimates of the energetic cost of reproduction in humpback whales. Ecosphere 2016, 7, 1–18. [Google Scholar] [CrossRef]
- Hodgson, A.; Peel, D.; Kelly, N. Unmanned aerial vehicles for surveying marine fauna: Assessing detection probability. Ecol. Appl. 2017, 27, 1253–1267. [Google Scholar] [CrossRef]
- Witczuk, J.; Pagacz, S.; Zmarz, A.; Cypel, M. Exploring the feasibility of unmanned aerial vehicles and thermal imaging for ungulate surveys in forests-preliminary results. Int. J. Remote Sens. 2018, 39, 5504–5521. [Google Scholar] [CrossRef]
- Vermeulen, C.; Lejeune, P.; Lisein, J.; Sawadogo, P.; Bouché, P. Unmanned aerial survey of elephants. PLoS ONE 2013, 8, e54700. [Google Scholar] [CrossRef] [Green Version]
- Hodgson, J.C.; Mott, R.; Baylis, S.M.; Pham, T.T.; Wotherspoon, S.; Kilpatrick, A.D.; Koh, L.P. Drones count wildlife more accurately and precisely than humans. Methods Ecol. Evol. 2018, 9, 1160–1167. [Google Scholar] [CrossRef] [Green Version]
- McCafferty, D.J.; Gallon, S.; Nord, A. Challenges of measuring body temperatures of free-ranging birds and mammals. Anim. Biotelemetry 2015, 3, 33. [Google Scholar] [CrossRef] [Green Version]
- Tanase, M.A. Detection of windthrows and insect outbreaks by L-band SAR: A case study in the Bavarian Forest National Park. Remote Sens. Environ. 2018, 209, 700–711. [Google Scholar] [CrossRef]
- Pradhan, B.; Suliman, M.D.H.B.; Awang, M.A.B. Forest fire susceptibility and risk mapping using remote sensing and geographical information systems (GIS). Disaster Prev. Manag. An. Int. J. 2007, 16, 344–352. [Google Scholar] [CrossRef]
- Bouabdellah, K.; Noureddine, H.; Larbi, S. Using wireless sensor networks for reliable forest fires detection. Procedia Comput. Sci. 2013, 19, 794–801. [Google Scholar] [CrossRef] [Green Version]
- Gaur, A.; Singh, A.; Kumar, A.; Kulkarni, K.S.; Lala, S.; Kapoor, K.; Mukhopadhyay, S.C. Fire sensing technologies: A review. IEEE Sens. J. 2019, 19, 3191–3202. [Google Scholar] [CrossRef]
- Gaur, A.; Singh, A.; Kumar, A.; Kumar, A.; Kapoor, K. Video flame and smoke based fire detection algorithms: A literature review. Fire Technol. 2020, 56, 1943–1980. [Google Scholar] [CrossRef]
- Memane, S.E.; Kulkarni, V.S. A review on flame and smoke detection techniques in video’s. Int. J. Adv. Res. Electr. Electron. Instrumen. Eng. 2015, 4, 885–889. [Google Scholar]
- Bu, F.; Gharajeh, M.S. Intelligent and vision-based fire detection systems: A survey. Image Vis. Comput. 2019, 91, 103803. [Google Scholar] [CrossRef]
- Allison, R.S.; Johnston, J.M.; Craig, G.; Jennings, S. Airborne optical and thermal remote sensing for wildfire detection and monitoring. Sensors 2016, 16, 1310. [Google Scholar] [CrossRef] [Green Version]
- Nixon, M.; Aguado, A. Feature Extraction and Image Processing for Computer Vision, 4th ed.; Academic Press: London, UK, 2019; pp. 141–217. [Google Scholar]
- Brinkman, M.P.; Garcelon, D.K. Applying UAV Systems in Wildlife Management. Proc. Vertebr. Pest. Conf. 2020, 29, 1–4. [Google Scholar]
- Yuan, C.; Liu, Z.; Zhang, Y. UAV-based forest fire detection and tracking using image processing techniques. In Proceedings of the 2015 International Conference on Unmanned Aircraft Systems (ICUAS), Denver, CO, USA, 9–12 June 2015; IEEE: New York, NY, USA, 2015; pp. 639–643. [Google Scholar] [CrossRef]
- Albani, D.D.; Nardi, V. Trianni Field coverage and weed mapping by UAV swarms. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 4319–4325. [Google Scholar]
- Lottes, P.; Khanna, R.; Pfeifer, J.; Siegwart, R.; Stachniss, C. UAV-based crop and weed classification for smart farming. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; IEEE: New York, NY, USA, 2017; pp. 3024–3031. [Google Scholar] [CrossRef]
- Ostovar, A.; Hellström, T.; Ringdahl, O. Human detection based on infrared images in forestry environments. In Image Analysis and Recognition. ICIAR 2016. Lecture Notes in Computer Science; Campilho, A., Karray, F., Eds.; Springer: Cham, Switzerland, 2016; Volume 9730. [Google Scholar] [CrossRef] [Green Version]
- Yuan, C.; Liu, Z.; Zhang, Y. Aerial images-based forest fire detection for firefighting using optical remote sensing techniques and unmanned aerial vehicles. J. Intell. Robot. Syst. 2017, 88, 635–654. [Google Scholar] [CrossRef]
- Harikumar, K.; Senthilnath, J.; Sundaram, S. Multi-UAV oxyrrhis marina-inspired search and dynamic formation control for forest firefighting. IEEE Trans. Autom. Sci. Eng. 2018, 16, 863–873. [Google Scholar] [CrossRef]
- Merino, L.; Caballero, F.; de Dios, J.R.M.; Maza, I.; Ollero, A. Automatic forest fire monitoring and measurement using unmanned aerial vehicles. In Proceedings of the 6th International Congress on Forest Fire Research, Coimbra, Portugal, 15–18 November 2010. Available online: http://robotics.upo.es/~lmercab/publications/papers/ICFFR10_Merinoetal.pdf (accessed on 20 January 2022).
- Zharikova, M.; Sherstjuk, V. Forest firefighting monitoring system based on UAV team and remote sensing. In Automated Systems in the Aviation and Aerospace Industries; IGI Global: Hershey, PA, USA, 2019; p. 22. [Google Scholar] [CrossRef]
- Imdoukh, A.; Shaker, A.; Al-Toukhy, A.; Kablaoui, D.; El-Abd, M. Semi-autonomous indoor firefighting UAV. In Proceedings of the 2017 18th International Conference on Advanced Robotics (ICAR), Hong Kong, China, 10–12 July 2017; pp. 310–315. [Google Scholar] [CrossRef]
- Yuan, C.; Liu, Z.; Zhang, Y. Learning-based smoke detection for unmanned aerial vehicles applied to forest fire. J. Intell. Robot. Syst. 2019, 93, 337–349. [Google Scholar] [CrossRef]
- Merino, L.; Caballero, F.; Martínez-de-Dios, J.R.; Maza, I.; Ollero, A. An unmanned aircraft system for automatic forest fire monitoring and measurement. J. Intell. Robot. Syst. 2012, 65, 533–548. [Google Scholar] [CrossRef]
- Pham, H.X.; La, H.M.; Feil-Seifer, D.; Deans, M. A distributed control framework for a team of unmanned aerial vehicles for dynamic wildfire tracking. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; IEEE: New York, NY, USA, 2017; pp. 6648–6653. [Google Scholar] [CrossRef] [Green Version]
- McKenna, P.; Erskine, P.D.; Lechner, A.M.; Phinn, S. Measuring fire severity using UAV imagery in semi-arid central Queensland, Australia. Int. J. Remote Sens. 2017, 38, 4244–4264. [Google Scholar] [CrossRef]
- Lee, W.; Kim, S.; Lee, Y.T.; Lee, H.W.; Choi, M. Deep neural networks for wild fire detection with unmanned aerial vehicle. In Proceedings of the 2017 IEEE International Conference on Consumer Electronics (ICCE), Las Vegas, NV, USA, 30 March 2017; IEEE: New York, NY, USA, 2017; pp. 252–253. [Google Scholar] [CrossRef]
- Holyoak, M.; Casagrandi, R.; Nathan, R.; Revilla, E.; Spiegel, O. Trends and missing parts in the study of movement ecology. Proc. Natl. Acad. Sci. USA 2008, 105, 19060–19065. [Google Scholar] [CrossRef] [Green Version]
- Jeltsch, F.; Bonte, D.; Pe’er, G.; Reineking, B.; Leimgruber, P.; Balkenhol, N.; Bauer, S. Integrating movement ecology with biodiversity research-exploring new avenues to address spatiotemporal biodiversity dynamics. Mov. Ecol. 2013, 1, 1–13. [Google Scholar] [CrossRef] [Green Version]
- van Mantgem, E.F.; Keeley, J.E.; Witter, M. Faunal responses to fire in chaparral and sage scrub in California, USA. Fire Ecol. 2015, 11, 128–148. [Google Scholar] [CrossRef] [Green Version]
- Pausas, J.G.; Parr, C.L. Towards an understanding of the evolutionary role of fire in animals. Evol. Ecol. 2018, 32, 113–125. [Google Scholar] [CrossRef]
- Nimmo, D.G.; Kelly, L.T.; Spence-Bailey, L.M.; Watson, S.J.; Taylor, R.S.; Clarke, M.F.; Bennett, A.F. Fire mosaics and reptile conservation in a fire-prone region. Conserv. Biol. 2013, 27, 345–353. [Google Scholar] [CrossRef] [PubMed]
- Nimmo, D.G.; Avitabile, S.; Banks, S.C.; Bliege Bird, R.; Callister, K.; Clarke, M.F.; Bennett, A.F. Animal movements in fire-prone landscapes. Biol. Rev. 2019, 94, 981–998. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Marvin, D.C.; Koh, L.P.; Lynam, A.J.; Wich, S.; Davies, A.B.; Krishnamurthy, R.; Asner, G.P. Integrating technologies for scalable ecology and conservation. Glob. Ecol. Conserv. 2016, 7, 262–275. [Google Scholar] [CrossRef] [Green Version]
- Scholten, C.N.; Kamphuis, A.J.; Vredevoogd, K.J.; Lee-Strydhorst, K.G.; Atma, J.L.; Shea, C.B.; Proppe, D.S. Real-time thermal imagery from an unmanned aerial vehicle can locate ground nests of a grassland songbird at rates similar to traditional methods. Biol. Conserv. 2019, 233, 241–246. [Google Scholar] [CrossRef]
- Karumanchi, R.V.; Raju, S.H.; Kavitha, S.; Lalitha, V.L.; Krishna, S.V. Fully Smart fire detection and prevention in the authorized forests. In Proceedings of the 2021 International Conference on Artificial Intelligence and Smart Systems (ICAIS), Coimbatore, India, 25–27 March 2021; IEEE: New York, NY, USA, 2021; pp. 573–579. [Google Scholar] [CrossRef]
- Moura, M.C.; Caparelli, A.C.; Freitas, S.R.; Vieira, M.V. Scale-dependent habitat selection in three didelphid marsupials using the spool-and-line technique in the Atlantic forest of Brazil. J. Trop. Ecol. 2005, 21, 337–342. [Google Scholar] [CrossRef]
- Kay, G.M.; Driscoll, D.A.; Lindenmayer, D.B.; Pulsford, S.A.; Mortelliti, A. Pasture height and crop direction influence reptile movement in an agricultural matrix. Agric. Ecosyst. Environ. 2016, 235, 164–171. [Google Scholar] [CrossRef]
- Hodgson, J.C.; Baylis, S.M.; Mott, R.; Herrod, A.; Clarke, R.H. Precision wildlife monitoring using unmanned aerial vehicles. Sci. Rep. 2016, 6, 22574. [Google Scholar] [CrossRef] [Green Version]
- Ivanova, S.; Prosekov, A. Hunting resource management by population size control by remote sensing using an unmanned aerial vehicle. Nat. Environ. Pollut. Technol. 2022, in press. [Google Scholar]
- Gonzalez, L.F.; Montes, G.A.; Puig, E.; Johnson, S.; Mengersen, K.; Gaston, K.J. Unmanned Aerial Vehicles (UAVs) and Artificial Intelligence Revolutionizing Wildlife Monitoring and Conservation. Sensors 2016, 16, 97. [Google Scholar] [CrossRef] [Green Version]
- McCarthy, E.D.; Martin, J.M.; Boer, M.M.; Welbergen, J.A. Drone-based thermal remote sensing provides an effective new tool for monitoring the abundance of roosting fruit bats. Remote Sens. Ecol. Conserv. 2021, 7, 461–474. [Google Scholar] [CrossRef]
- Di, L.; Fromm, Y.T.; Chen, Q. A data fusion system for attitude estimation of low-cost miniature UAVs. J. Intell Robot. Syst 2012, 65, 621–635. [Google Scholar] [CrossRef]
- Van Moorter, B.; Visscher, D.R.; Jerde, C.L.; Frair, J.L.; Merrill, E.H. Identifying movement states from location data using cluster analysis. J. Wildl. Manag. 2010, 74, 588–594. [Google Scholar] [CrossRef]
- Berry, L.E.; Lindenmayer, D.B.; Dennis, T.E.; Driscoll, D.A.; Banks, S.C. Fire severity alters spatio–temporal movements and habitat utilisation by an arboreal marsupial, the mountain brushtail possum (Trichosurus cunninghami). Int. J. Wildland Fire 2016, 25, 1291–1302. [Google Scholar] [CrossRef]
- McGregor, H.W.; Legge, S.; Jones, M.E.; Johnson, C.N. Extraterritorial hunting expeditions to intense fire scars by feral cats. Sci. Rep. 2016, 6, 22559. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bouten, W.; Baaij, E.W.; Shamoun-Baranes, J.; Camphuysen, K.C. A flexible GPS tracking system for studying bird behaviour at multiple scales. J. Ornithol. 2013, 154, 571–580. [Google Scholar] [CrossRef] [Green Version]
- Wang, D.; Shao, Q.; Yue, H. Surveying wild animals from satellites, manned aircraft and unmanned aerial systems (UASs): A review. Remote Sens. 2019, 11, 1308. [Google Scholar] [CrossRef] [Green Version]
Figure 1.
Drone Supercam S250 (fixed-wing aircraft): (a) flight preparation; (b) completing a wildlife monitoring task. The drone is launched with elastic or pneumatic catapult, landingby parachute with a line release system (photo from the KemSU collection).
Figure 1.
Drone Supercam S250 (fixed-wing aircraft): (a) flight preparation; (b) completing a wildlife monitoring task. The drone is launched with elastic or pneumatic catapult, landingby parachute with a line release system (photo from the KemSU collection).

Figure 2.
Monitored area: Kemerovo region—Kuzbass on the map of Russia. Source: https://google.com/maps//@55.4020429,80.4461703,5z/data=!5m1!1e4?hl=en (accessed on 30 March 2022): 1 and 2 are districts of the region where I, II, and III hunting grounds are located.
Figure 2.
Monitored area: Kemerovo region—Kuzbass on the map of Russia. Source: https://google.com/maps//@55.4020429,80.4461703,5z/data=!5m1!1e4?hl=en (accessed on 30 March 2022): 1 and 2 are districts of the region where I, II, and III hunting grounds are located.

Figure 3.
A shot in which the algorithm revealed two elk (red circle at the top of the shot) during a visual check: (a,b)—RGB photo fragments; (c)—IR image fragment. Survey altitude −250 m; drone flight speed—83 km/h; outside temperature—−15 °C; wind speed—8 m/s (photo from the KemSU collection).
Figure 3.
A shot in which the algorithm revealed two elk (red circle at the top of the shot) during a visual check: (a,b)—RGB photo fragments; (c)—IR image fragment. Survey altitude −250 m; drone flight speed—83 km/h; outside temperature—−15 °C; wind speed—8 m/s (photo from the KemSU collection).


Figure 4.
Drone in a forest-fire monitoring mission (photo from the KemSU collection).


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
The results of monitoring wild animals (number of individuals) using traditional methods and digital technologies in hunting grounds of the Kemerovo region (Russia, 2019–2020).
Table 1.
The results of monitoring wild animals (number of individuals) using traditional methods and digital technologies in hunting grounds of the Kemerovo region (Russia, 2019–2020).
| Object of Study | Number of Individuals | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| I | II | III | |||||||
| 1 | 2 | 1 | 2 | 1 | 2 | ||||
| 2019 | 2019 | 2020 | 2019 | 2019 | 2020 | 2019 | 2019 | 2020 | |
| Maral deer | 3 | 7 | 11 | 2 | 5 | 9 | 85 | 93 | 98 |
| Roe deer | 48 | 69 | 74 | 25 | 42 | 51 | 220 | 245 | 254 |
| Elk | 42 | 57 | 59 | 103 | 99 | 101 | 59 | 57 | 58 |
| Wild boar | 36 | 42 | 40 | 0 | 0 | 0 | 150 | 172 | 191 |
| Sable | 187 | 243 | 260 | 634 | 691 | 734 | 190 | 223 | 256 |
| Badger | 36 | 34 | 40 | 131 | 159 | 168 | 140 | 130 | 141 |
| Fox | 18 | 22 | 21 | 49 | 41 | 44 | 25 | 21 | 24 |
| White hare | 89 | 74 | 69 | 400 | 398 | 395 | 180 | 233 | 225 |
1—according to traditional observation methods; 2—according to drone remote monitoring data; I, II, and III—hunting grounds.
Table 2.
Types of drones and equipment used for wildlife monitoring.
| Drone Type | Equipment | Shooting Type | Object of Observation | Features | Sources |
|---|---|---|---|---|---|
| AscTec Firefly hexacopter | Onboard computer, uEye wideband camera, and inertial measurement unit; vision-based sensors | Video | Elefants, rhinos | Adaptive tracking algorithm; dependence of image quality on the type of drone | [33] |
| Splashdrone quadcopter | Canon fixed camera | - | Humpback whales (Megaptera novaeangliae) | Necessity to get close to animals | [34] |
| Fixed-wing drone ScanEagle | Nikon digital reflex camera; Standard Definition Electro-Optical Camera (Electro-Optical Imaging, Inc., West Melbourne, FL, USA) | Spectroscopy | Humpback whales (Megaptera novaeangliae) | Ability to collect additional spatial information; limited camera coverage; the systematic movement of animals introduces errors in monitoring the population size; the need for GPS navigation | [35] |
| Fixed-wing AVI-1 aeroplane; fixed-wing Skywalker X8 Flying Wing | Autopilot, GPS-module, radiotelemetric system, Thermal imager, TIR-camera IRMOD v640 | Thermal imagery | Large ungulates | Dependence on environmental conditions and weather; difficulty in species identification; the need for a library of reference signatures for animal identification; the need to increase the resolution of the camera | [36] |
| Unmanned aerial system | GPS, inertial measuring unit, fixed automatic camera Ricoh GR III | - | Elefants | Low autonomy; high cost of the system | [37] |
| FX79 airframe drone | Mirrorless digital camera EOS M, Canon, CMOS ceнcop (vision-based sensors) | Video | Colonies of three seabird taxa—frigatebirds, terns, and penguins | Population counting accuracy; | [75] |
| Quadrocopter Iris+, 3D Robotics | Digital camera Cyber-shot RX100 III, Sony, CMOS sensor (vision-based sensors) | Video | tern Thalasseus bergii | Reducing the time for counting the number of individuals; increase in accuracy; no negative impact on animals | [38] |
| Fixed-wing aircraft Supercam S250 | Camera and Thermal infrared object finder (TIOF) | Video Thermal imagery | Maral deer, Roe deer, Elk, Wild boar, Sable, Badger, Fox, and White hare | Accuracy of received data and operator safety; customized software; dependence on weather conditions | [76] |
| S800 EVO Hexacopter | WooKong-M (WK-M) flight controller, GPS, FLIR-Tau 2-640 camera | RGB-video Thermal imagery | Koalas | Efficiency of monitoring in hard-to-reach places; the laboriousness of processing large volumes of images to identify individual species and specimens of animals; high operating costs | [77] |
| DJI Inspire 1 version 2.0 drone | Zenmuse XT radiometric thermal camera | Thermal imagery | Flying-fox colonies | Influence of weather phenomena on the quality of thermographic images; it is desirable to have information about the nature of the movement and dislocation of individuals | [78] |
Table 3.
Types of drones and equipment used for fire wildlife monitoring.
| Drone Type | Equipment | Shooting Type | Features | Sources |
|---|---|---|---|---|
| Drone or group of drones | Surveillance systems with cameras; IR sensors, inertial sensors, thermal sensors, and vision sensors | Video | Fast response ability, high performance, low cost, and operator safety | [54] |
| IR spectrometry | [55] | |||
| Thermal imagery | [79] | |||
| ALTUS drone | IMUS and GPS navigators, Infrared and video cameras | Video IR spectrometry | Operator safety and agility | [56] |
| Fixed-wing and proppeler drones | Onboard radio-electronic and instrumental equipment, a global positioning system receiver for self-locating, and wireless modems for building a communication network with other drones; optical and IR cameras | Photo Video IR spectroscopy | Possibility of application in hard-to-reach areas, breadth of the territory of use; dependence on weather conditions; flight time limit | [25] |
| Quadcopters, hexacopters, octacopters | Inertial navigation systems, GPS, and HF transceivers and cameras | Video | Reducing the negative impact of cloudiness and dependence on lighting; algorithms for detecting smoke in an image | [59] |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Ivanova, S.; Prosekov, A.; Kaledin, A. A Survey on Monitoring of Wild Animals during Fires Using Drones. Fire 2022, 5, 60. https://doi.org/10.3390/fire5030060
AMA Style
Ivanova S, Prosekov A, Kaledin A. A Survey on Monitoring of Wild Animals during Fires Using Drones. Fire. 2022; 5(3):60. https://doi.org/10.3390/fire5030060
Chicago/Turabian StyleIvanova, Svetlana, Alexander Prosekov, and Anatoly Kaledin. 2022. "A Survey on Monitoring of Wild Animals during Fires Using Drones" Fire 5, no. 3: 60. https://doi.org/10.3390/fire5030060