
Virtual Fence System Based on IoT Paradigm to Prevent Occupational Accidents in the Construction Sector

 ,
,  ,
,  and
and
Abstract
:1. Introduction
2. Materials and Methods
- STAGE 0—Background. The safety problem in construction sites consisting of the intrusion into a hazardous zone has been identified, as explained in the Introduction section. Existing preventive measures and relevant previous works have been catalogued (see Section 2.1).
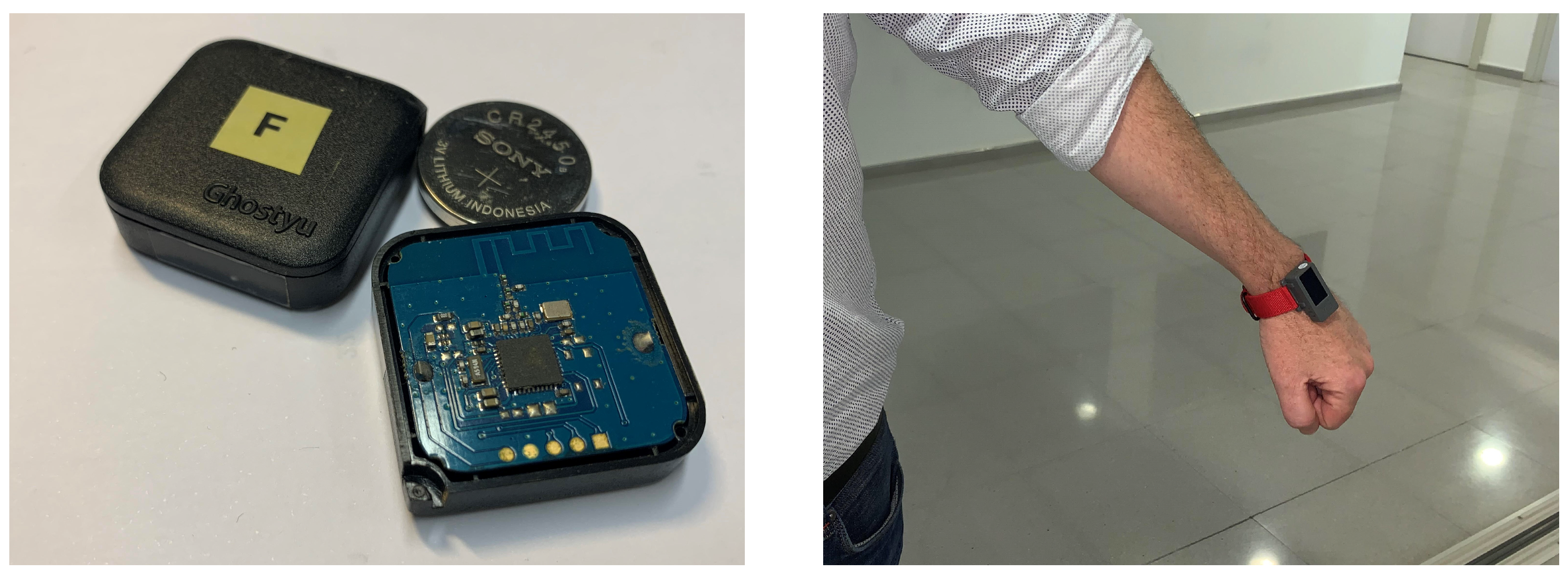
- STAGE 1—Virtual fence system. In this step, a virtual fence system has been devised based on BLE beacons technology. The system is composed of beacons attached to signing cones, a beacon detector carried by the worker as a wearable, and a finite state machine with localization filters implemented in the monitoring software. This is described in Section 2.1.
- STAGE 2—Qualitative assessment design. Once the system has been established, a framework for evaluating it has been designed following the existing literature. The qualitative methodology of choice has been the one of staticized groups, i.e., a group of qualified experts to form an assessment panel.
- STAGE 3—Qualitative assessment run. Interviews have been conducted with the experts selected at stage 2. The results have been analyzed and discussed.
2.1. Virtual Fence System Design
- is the likelihood of being closer than the threshold provided that we know we are close or far. The shape of this likelihood and its parameters are designed as a first-order system step response, as explained in detail in [38].
- is the probability of changing from close to, far, or between any other combination of close/far in one step of motion, provided that we know the metrical distance between beacon and receiver. We approximate this (since the value of is unknown) as a modulation of the simpler through : is increased linearly if the evidence provided by the estimate of supports the particular combination of and , and is decreased linearly when that evidence contradicts it (again, see details in [38]).
- The prior distributions for and are not critical, since the filters usually converge in a few steps. In our experiments, we have chosen values compatible with practical scenarios, in particular for the worker being initially around 10 cm from the true distance from the beacons with probability and, consequently, in state with probability.
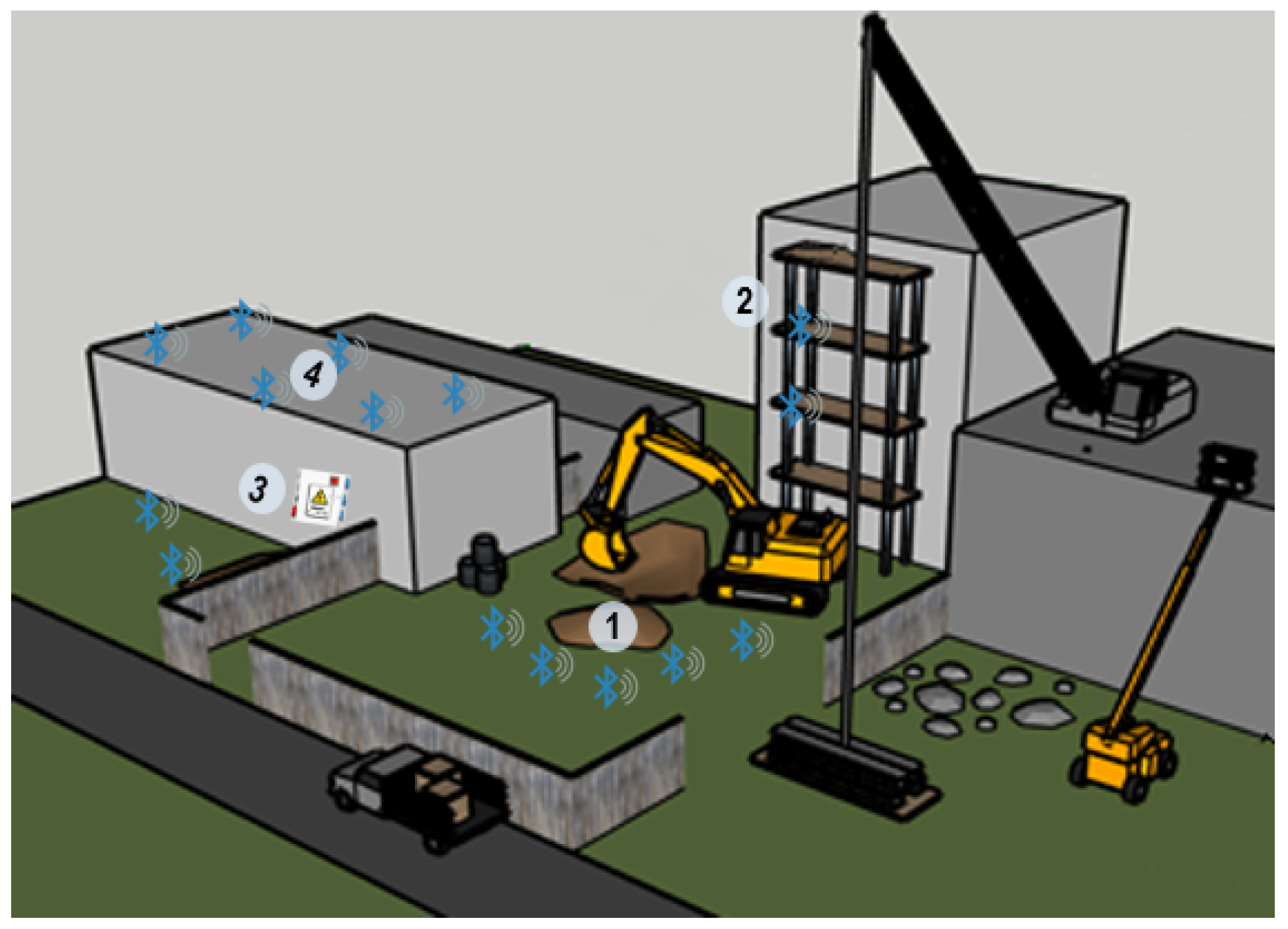
Scenarios for Potential Application in the Construction Sector
2.2. Qualitative Assessment of the Proposal
2.2.1. Panel Members Selection
- All have a Master’s degree in Occupational Health and Safety, which demonstrates their training in Safety topics.
- All have a Degree or a Master’s with a technical profile.
- All panelists together have a total experience of 139 years.
- Three of them have published more than five scientific papers related with construction safety.
2.2.2. Questionnaire Design
3. Results and Expert Discussion
4. Conclusions
Future Research
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| BIM | Building Information Management |
| BLE | Bluetooth Low Energy |
| GPS | Global Positioning System |
| IoT | Internet of Things |
| RFID | Radio Frequency Identification |
| UWB | Ultra Wide Band |
References
- Andersen, J.H.; Malmros, P.; Ebbehoej, N.E.; Flachs, E.M.; Bengtsen, E.; Bonde, J.P. Systematic literature review on the effects of occupational safety and health (OSH) interventions at the workplace. Scand. J. Work Environ. Health 2019, 45, 103–113. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Pietilä, J.; Räsänen, T.; Reiman, A.; Ratilainen, H.; Helander, E. Characteristics and determinants of recurrent occupational accidents. Saf. Sci. 2018, 108, 269–277. [Google Scholar] [CrossRef]
- Forteza, F.J.; Carretero-Gomez, J.M.; Sese, A. Occupational risks, accidents on sites and economic performance of construction firms. Saf. Sci. 2017, 94, 61–76. [Google Scholar] [CrossRef]
- Haslam, R.A.; Hide, S.A.; Gibb, A.G.; Gyi, D.E.; Pavitt, T.; Atkinson, S.; Duff, A.R. Contributing factors in construction accidents. Appl. Ergon. 2005, 36, 401–415. [Google Scholar] [CrossRef] [Green Version]
- Jazayeri, E.; Dadi, G.B. Construction safety management systems and methods of safety performance measurement: A review. J. Saf. Eng. 2017, 6, 15–28. [Google Scholar]
- Kaassis, B.; Badri, A. Development of a preliminary model for evaluating occupational health and safety risk management maturity in small and medium-sized enterprises. Safety 2018, 4, 5. [Google Scholar] [CrossRef] [Green Version]
- Lombardi, M.; Fargnoli, M.; Parise, G. Risk profiling from the european statistics on accidents at work (ESAW) accidents’ databases: A case study in construction sites. Int. J. Environ. Res. Public Health 2019, 16, 4748. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Demirkesen, S.; Arditi, D. Construction safety personnel’s perceptions of safety training practices. Int. J. Proj. Manag. 2015, 33, 1160–1169. [Google Scholar] [CrossRef]
- Ibarrondo-Dávila, M.; López-Alonso, M.; Rubio-Gámez, M. Managerial accounting for safety management. The case of a Spanish construction company. Saf. Sci. 2015, 79, 116–125. [Google Scholar] [CrossRef]
- Arcury, T.A.; Summers, P.; Rushing, J.; Grzywacz, J.G.; Mora, D.C.; Quandt, S.A.; Lang, W.; Mills, T.H., III. Work safety climate, personal protection use, and injuries among Latino residential roofers. Am. J. Ind. Med. 2015, 58, 69–76. [Google Scholar] [CrossRef]
- Saurin, T.A.; Formoso, C.T.; Cambraia, F.B. An analysis of construction safety best practices from a cognitive systems engineering perspective. Saf. Sci. 2008, 46, 1169–1183. [Google Scholar] [CrossRef]
- Navon, R.; Sacks, R. Assessing research issues in automated project performance control (APPC). Autom. Constr. 2007, 16, 474–484. [Google Scholar] [CrossRef]
- Karakhan, A.; Xu, Y.; Nnaji, C.; Alsaffar, O. Technology Alternatives for Workplace Safety Risk Mitigation in Construction: Exploratory Study. In Advances in Informatics and Computing in Civil and Construction Engineering; Springer: Berlin/Heidelberg, Germany, 2019; pp. 823–829. [Google Scholar]
- Nnaji, C.; Karakhan, A.A. Technologies for safety and health management in construction: Current use, implementation benefits and limitations, and adoption barriers. J. Build. Eng. 2020, 29, 101212. [Google Scholar] [CrossRef]
- Cheng, T.; Teizer, J. Real-time resource location data collection and visualization technology for construction safety and activity monitoring applications. Autom. Constr. 2013, 34, 3–15. [Google Scholar] [CrossRef]
- Heng, L.; Shuang, D.; Skitmore, M.; Qinghua, H.; Qin, Y. Intrusion warning and assessment method for site safety enhancement. Saf. Sci. 2016, 84, 97–107. [Google Scholar] [CrossRef] [Green Version]
- Huh, J.H.; Seo, K. An indoor location-based control system using bluetooth beacons for IoT systems. Sensors 2017, 17, 2917. [Google Scholar] [CrossRef] [Green Version]
- Baronti, P.; Barsocchi, P.; Chessa, S.; Mavilia, F.; Palumbo, F. Indoor bluetooth low energy dataset for localization, tracking, occupancy, and social interaction. Sensors 2018, 18, 4462. [Google Scholar] [CrossRef] [Green Version]
- Kolakowski, J.; Djaja-Josko, V.; Kolakowski, M.; Broczek, K. UWB/BLE tracking system for elderly people monitoring. Sensors 2020, 20, 1574. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ang, J.L.F.; Lee, W.K.; Ooi, B.Y. GreyZone: A Novel Method for Measuring and Comparing Various Indoor Positioning Systems. In Proceedings of the 2019 International Conference on Green and Human Information Technology (ICGHIT), Kuala Lumpur, Malaysia, 16–18 January 2019; pp. 30–35. [Google Scholar]
- Loveday, A.; Sherar, L.B.; Sanders, J.P.; Sanderson, P.W.; Esliger, D.W. Technologies that assess the location of physical activity and sedentary behavior: A systematic review. J. Med. Internet Res. 2015, 17, e192. [Google Scholar] [CrossRef]
- Herrera, J.A.; Plöger, P.G.; Hinkenjann, A.; Maiero, J.; Flores, M.; Ramos, A. Pedestrian indoor positioning using smartphone multi-sensing, radio beacons, user positions probability map and IndoorOSM floor plan representation. In Proceedings of the 2014 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Busan, Korea, 27–30 October 2014; pp. 636–645. [Google Scholar]
- Gholamhosseini, L.; Sadoughi, F.; Safaei, A. Hospital real-time location system (A practical approach in healthcare): A narrative review article. Iran. J. Public Health 2019, 48, 593. [Google Scholar] [CrossRef] [PubMed]
- Kim, H.; Han, S. Accuracy improvement of real-time location tracking for construction workers. Sustainability 2018, 10, 1488. [Google Scholar] [CrossRef] [Green Version]
- Lim, J.S.; Song, K.I.; Lee, H.L. Real-time location tracking of multiple construction laborers. Sensors 2016, 16, 1869. [Google Scholar] [CrossRef] [Green Version]
- Umer, W.; Siddiqui, M.K. Use of Ultra Wide Band Real-Time Location System on Construction Jobsites: Feasibility Study and Deployment Alternatives. Int. J. Environ. Res. Public Health 2020, 17, 2219. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Valero, E.; Adán, A.; Cerrada, C. Evolution of RFID applications in construction: A literature review. Sensors 2015, 15, 15988–16008. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ratajczak, J.; Riedl, M.; Matt, D.T. BIM-based and AR application combined with location-based management system for the improvement of the construction performance. Buildings 2019, 9, 118. [Google Scholar] [CrossRef] [Green Version]
- Choi, B.; Hwang, S.; Lee, S. What drives construction workers’ acceptance of wearable technologies in the workplace?: Indoor localization and wearable health devices for occupational safety and health. Autom. Constr. 2017, 84, 31–41. [Google Scholar] [CrossRef]
- Wang, X.; White, L.; Chen, X.; Gao, Y.; Li, H.; Luo, Y. An empirical study of wearable technology acceptance in healthcare. Ind. Manag. Data Syst. 2015, 115, 1704–1723. [Google Scholar]
- Li, H.; Gupta, A.; Zhang, J.; Sarathy, R. Examining the decision to use standalone personal health record systems as a trust-enabled fair social contract. Decis. Support Syst. 2014, 57, 376–386. [Google Scholar] [CrossRef]
- Teizer, J.; Golovina, O.; Wang, D.; Pradhanang, N. Automated collection, identification, localization, and analysis of worker-related proximity hazard events in heavy construction equipment operation. In Proceedings of the International Symposium on Automation and Robotics in Construction, Oulu, Finland, 15–18 June 2015; IAARC Publications, 2015; Volume 32, pp. 1–9. [Google Scholar]
- Kelm, A.; Laußat, L.; Meins-Becker, A.; Platz, D.; Khazaee, M.J.; Costin, A.M.; Helmus, M.; Teizer, J. Mobile passive Radio Frequency Identification (RFID) portal for automated and rapid control of Personal Protective Equipment (PPE) on construction sites. Autom. Constr. 2013, 36, 38–52. [Google Scholar] [CrossRef]
- Awolusi, I.; Marks, E.; Hallowell, M. Wearable technology for personalized construction safety monitoring and trending: Review of applicable devices. Autom. Constr. 2018, 85, 96–106. [Google Scholar] [CrossRef]
- Moselhi, O.; Bardareh, H.; Zhu, Z. Automated data acquisition in construction with remote sensing technologies. Appl. Sci. 2020, 10, 2846. [Google Scholar] [CrossRef] [Green Version]
- Razavi, S.N.; Moselhi, O. GPS-less indoor construction location sensing. Autom. Constr. 2012, 28, 128–136. [Google Scholar] [CrossRef]
- Martinez-Aires, M.D.; Lopez-Alonso, M.; Martinez-Rojas, M. Building information modeling and safety management: A systematic review. Saf. Sci. 2018, 101, 11–18. [Google Scholar] [CrossRef]
- Gomez-de Gabriel, J.M.; Fernández-Madrigal, J.A.; Lopez-Arquillos, A.; Rubio-Romero, J.C. Monitoring harness use in construction with BLE beacons. Measurement 2019, 131, 329–340. [Google Scholar] [CrossRef]
- Rey-Merchán, M.d.C.; Gómez-de Gabriel, J.M.; Fernández-Madrigal, J.A.; López-Arquillos, A. Improving the prevention of fall from height on construction sites through the combination of technologies. Int. J. Occup. Saf. Ergon. 2020, 1–10. [Google Scholar] [CrossRef] [PubMed]
- Morar, A.; Moldoveanu, A.; Mocanu, I.; Moldoveanu, F.; Radoi, I.E.; Asavei, V.; Gradinaru, A.; Butean, A. A comprehensive survey of indoor localization methods based on computer vision. Sensors 2020, 20, 2641. [Google Scholar] [CrossRef] [PubMed]
- Landaluce, H.; Arjona, L.; Perallos, A.; Falcone, F.; Angulo, I.; Muralter, F. A review of iot sensing applications and challenges using RFID and wireless sensor networks. Sensors 2020, 20, 2495. [Google Scholar] [CrossRef] [PubMed]
- Winge, S.; Albrechtsen, E. Accident types and barrier failures in the construction industry. Saf. Sci. 2018, 105, 158–166. [Google Scholar] [CrossRef]
- Dekker, S. Failure to adapt or adaptations that fail: Contrasting models on procedures and safety. Appl. Ergon. 2003, 34, 233–238. [Google Scholar] [CrossRef]
- Harvey, E.J.; Waterson, P.; Dainty, A.R. Beyond ConCA: Rethinking causality and construction accidents. Appl. Ergon. 2018, 73, 108–121. [Google Scholar] [CrossRef] [Green Version]
- White, S. Virtual Barrier System and Method. U.S. Patent No. US10 347 106 B2, 25 February 2016. [Google Scholar]
- Kapadia, A.; Henderson, T.; Fielding, J.J.; Kotz, D. Virtual walls: Protecting digital privacy in pervasive environments. In Proceedings of the International Conference on Pervasive Computing, Toronto, ON, Canada, 13–16 May 2007; Springer: Berlin/Heidelberg, Germany, 2007; pp. 162–179. [Google Scholar]
- Lin, P.; Li, Q.; Fan, Q.; Gao, X. Real-time monitoring system for workers’ behavior analysis on a large-dam construction site. Int. J. Distrib. Sens. Netw. 2013, 9, 509423. [Google Scholar] [CrossRef]
- Singh, A.; Payal, A.; Bharti, S. A walkthrough of the emerging IoT paradigm: Visualizing inside functionalities, key features, and open issues. J. Netw. Comput. Appl. 2019, 143, 111–151. [Google Scholar] [CrossRef]
- Logvinov, O.; Kraemer, B.; Adams, C.; Heiles, J.; Stuebing, G.; Nielsen, M.; Mancuso, B. Standard for an Architectural Framework for the Internet of Things (IOT) IEEE p2413, IEEE-P2413 Working Group; Technical Report. 2016.
- Fernández-Madrigal, J.A. Simultaneous Localization and Mapping for Mobile Robots: Introduction and Methods: Introduction and Methods; IGI Global: Hersey, PA, USA, 2012. [Google Scholar]
- Hallowell, M.R.; Gambatese, J.A. Qualitative research: Application of the Delphi method to CEM research. J. Constr. Eng. Manag. 2009, 136, 99–107. [Google Scholar] [CrossRef]
- Rowe, G.; Wright, G. The Delphi technique as a forecasting tool: Issues and analysis. Int. J. Forecast. 1999, 15, 353–375. [Google Scholar] [CrossRef]
- Saurin, T.A.; Ribeiro, J.L.D.; Vidor, G. A framework for assessing poka-yoke devices. J. Manuf. Syst. 2012, 31, 358–366. [Google Scholar] [CrossRef]
- Shingo, S. Zero Quality Control: Source Inspection and the Poka-Yoke System; CRC Press: Boca Raton, FL, USA, 1986. [Google Scholar]
- Saurin, T.A.; Formoso, C.T.; Cambraia, F.B. Towards a common language between Lean production and safety management. In Proceedings of the IGLC-14, Santiago, Chile, 25–27 July 2006. [Google Scholar]
- Taber, K.S. The use of Cronbach’s alpha when developing and reporting research instruments in science education. Res. Sci. Educ. 2018, 48, 1273–1296. [Google Scholar] [CrossRef]
- Nnaji, C.; Gambatese, J.; Lee, H.W.; Zhang, F. Improving construction work zone safety using technology: A systematic review of applicable technologies. J. Traffic Transp. Eng. 2019, 7, 61–75. [Google Scholar] [CrossRef]
- Thomas, L.J.; Srinivasan, R.; Decina, L.E.; Staplin, L. Safety effects of automated speed enforcement programs: Critical review of international literature. Transp. Res. Rec. 2008, 2078, 117–126. [Google Scholar] [CrossRef] [Green Version]
- Soole, D.W.; Watson, B.C.; Fleiter, J.J. Effects of average speed enforcement on speed compliance and crashes: A review of the literature. Accid. Anal. Prev. 2013, 54, 46–56. [Google Scholar] [CrossRef] [Green Version]
- Zhang, P.; Li, N.; Jiang, Z.; Fang, D.; Anumba, C.J. An agent-based modeling approach for understanding the effect of worker-management interactions on construction workers’ safety-related behaviors. Autom. Constr. 2019, 97, 29–43. [Google Scholar] [CrossRef]
- Khosravi, Y.; Asilian-Mahabadi, H.; Hajizadeh, E.; Hassanzadeh-Rangi, N.; Bastani, H.; Behzadan, A.H. Factors influencing unsafe behaviors and accidents on construction sites: A review. Int. J. Occup. Saf. Ergon. 2014, 20, 111–125. [Google Scholar] [CrossRef] [PubMed]
- Ikpe, E.; Hammon, F.; Oloke, D. Cost-benefit analysis for accident prevention in construction projects. J. Constr. Eng. Manag. 2012, 138, 991–998. [Google Scholar] [CrossRef]
- Gambatese, J.A.; Hallowell, M. Factors that influence the development and diffusion of technical innovations in the construction industry. Constr. Manag. Econ. 2011, 29, 507–517. [Google Scholar] [CrossRef]
- Goh, Y.M.; Ubeynarayana, C.U.; Wong, K.L.X.; Guo, B.H. Factors influencing unsafe behaviors: A supervised learning approach. Accid. Anal. Prev. 2018, 118, 77–85. [Google Scholar] [CrossRef] [PubMed]
- Korman, D.B.; Zulps, A. Enhancing Construction Safety Using Wearable Technology. In Proceedings of the ASSE Professional Development Conference and Exposition, Denver, CO, USA, 19–22 June 2017; American Society of Safety Engineers: Park Ridge, IL, USA, 2017. [Google Scholar]
- Loosemore, M. Improving construction productivity: A subcontractor’s perspective. Eng. Constr. Archit. Manag. 2014, 21, 245–260. [Google Scholar] [CrossRef]
- Aouad, G.; Ozorhon, B.; Abbott, C. Facilitating innovation in construction: Directions and implications for research and policy. Constr. Innov. 2010, 10, 374–394. [Google Scholar] [CrossRef]
- Reid, C.R.; Schall, M.C., Jr.; Amick, R.Z.; Schiffman, J.M.; Lu, M.L.; Smets, M.; Moses, H.R.; Porto, R. Wearable Technologies: How Will We Overcome Barriers to Enhance Worker Performance, Health, In addition, Safety? In Proceedings of the Human Factors and Ergonomics Society Annual Meeting, Austin, TX, USA, 9–13 October 2017; SAGE Publications Sage CA: Los Angeles, CA, USA; Volume 61, pp. 1026–1030. [Google Scholar]
- Li, X.; Yi, W.; Chi, H.L.; Wang, X.; Chan, A.P. A critical review of virtual and augmented reality (VR/AR) applications in construction safety. Autom. Constr. 2018, 86, 150–162. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Technology | Advantages | Disadvantages |
|---|---|---|
| BLE [18,25,38,39] | Low power, easy to configure, low price, maintainability | Low precision |
| RFID [27,33] | No battery in tag, low price | reliability, scalability |
| GPS [35,36] | High coverage, not additional communication support required | Low precision, Only outdoors |
| BIM [28,37] | Information management | High cost, Complex configuration |
| UWB [19] | High precision | Complex configuration |
| COMPUTER VISION [40] | Good accuracy, data acquisition | Workers privacy, Controlled environment only, Human error |
| Parts of System | Function | Units |
|---|---|---|
| RF Beacons (Bn) | Beaconing a signal from the virtual fence | RSSI |
| Wearable RF receiver (R1) | Measurement of signal strength | RSSI |
| Bayesian filter | Proximity detection | RSSI and distance |
| Finite state machine | Status detection | Worker status |
| Achievement or Experience | Abbreviation | Score |
|---|---|---|
| Years of professional experience | Exp | 1 (each year) |
| Professional registration | Reg | 3 |
| Safety manager | Saf | 3 |
| Faculty member at university | Uni | 3 |
| Bachelor of Science | BS | 4 |
| Master of Science | MS | 2 |
| Doctor of Science | Ph.D | 4 |
| Expert | Exp | Reg | Saf | Uni | BS | MS | Ph.D | Total |
|---|---|---|---|---|---|---|---|---|
| 1 | 38 | 3 | 3 | 0 | 4 | 4 | 0 | 52 |
| 2 | 17 | 3 | 3 | 0 | 4 | 4 | 0 | 31 |
| 3 | 8 | 3 | 0 | 3 | 4 | 4 | 4 | 26 |
| 4 | 15 | 3 | 0 | 0 | 4 | 4 | 0 | 26 |
| 5 | 22 | 3 | 0 | 0 | 4 | 4 | 0 | 33 |
| 6 | 4 | 0 | 3 | 0 | 4 | 4 | 0 | 15 |
| 7 | 9 | 3 | 0 | 0 | 4 | 4 | 0 | 20 |
| 8 | 14 | 0 | 3 | 3 | 4 | 4 | 4 | 22 |
| 9 | 12 | 3 | 3 | 3 | 4 | 4 | 4 | 33 |
| Control | Affected Bias |
|---|---|
| Randomize the order of questions for each expert. | Contrast effect and primacy effect. |
| Remove members who experienced recent events. | Recency effect. |
| Ensure anonymity of panelist. | Dominance |
| Attribute | Average | Median | sd | var |
|---|---|---|---|---|
| Warning and control function | 2.11 | 2 | 0.11 | 0.33 |
| Workers affected | 3.11 | 4 | 1.05 | 0.99 |
| Performance | 2.44 | 2 | 0.88 | 0.69 |
| Safety risk for workers | 4.00 | 4 | 0.00 | 0.00 |
| Maintenance planning | 3.78 | 4 | 0.67 | 0.40 |
| Maintenance tests | 2.67 | 2 | 1.00 | 0.89 |
| Total system’s attribute | 3.02 | 3 | 0.66 | 0.50 |
| Attribute | Correlation | Cronbach’s Alpha if Item Deleted |
|---|---|---|
| Warning and control function | 0.416 | 0.777 |
| Workers affected | 0.693 | 0.730 |
| Performance | 0.598 | 0.743 |
| Safety risk for workers | 0.449 | 0.772 |
| Maintenance planning | 0.636 | 0.717 |
| Maintenance tests | 0.636 | 0.717 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rey-Merchán, M.d.C.; Gómez-de-Gabriel, J.M.; López-Arquillos, A.; Fernández-Madrigal, J.A. Virtual Fence System Based on IoT Paradigm to Prevent Occupational Accidents in the Construction Sector. Int. J. Environ. Res. Public Health 2021, 18, 6839. https://doi.org/10.3390/ijerph18136839
Rey-Merchán MdC, Gómez-de-Gabriel JM, López-Arquillos A, Fernández-Madrigal JA. Virtual Fence System Based on IoT Paradigm to Prevent Occupational Accidents in the Construction Sector. International Journal of Environmental Research and Public Health. 2021; 18(13):6839. https://doi.org/10.3390/ijerph18136839
Chicago/Turabian StyleRey-Merchán, María del Carmen, Jesús M. Gómez-de-Gabriel, Antonio López-Arquillos, and Juan A. Fernández-Madrigal. 2021. "Virtual Fence System Based on IoT Paradigm to Prevent Occupational Accidents in the Construction Sector" International Journal of Environmental Research and Public Health 18, no. 13: 6839. https://doi.org/10.3390/ijerph18136839