
Inertial Sensor Location for Ground Reaction Force and Gait Event Detection Using Reservoir Computing in Gait


Abstract
:1. Introduction
2. Material and Methods
2.1. Participants
2.2. Inclusion–Exclusion Criteria
2.3. Tasks and Procedures
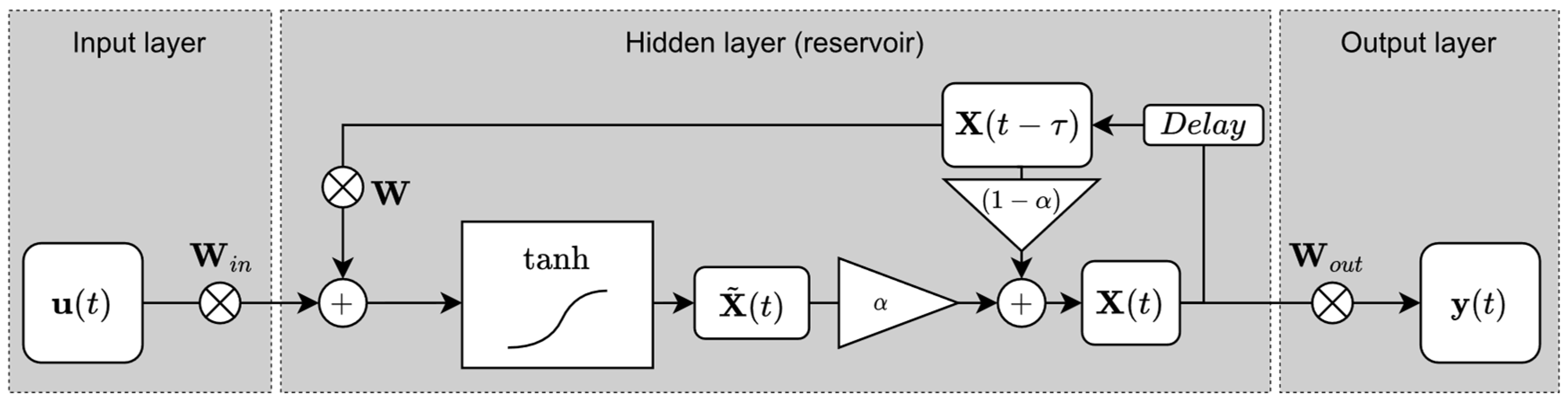
2.4. Echo State Network (ESN) Formulation
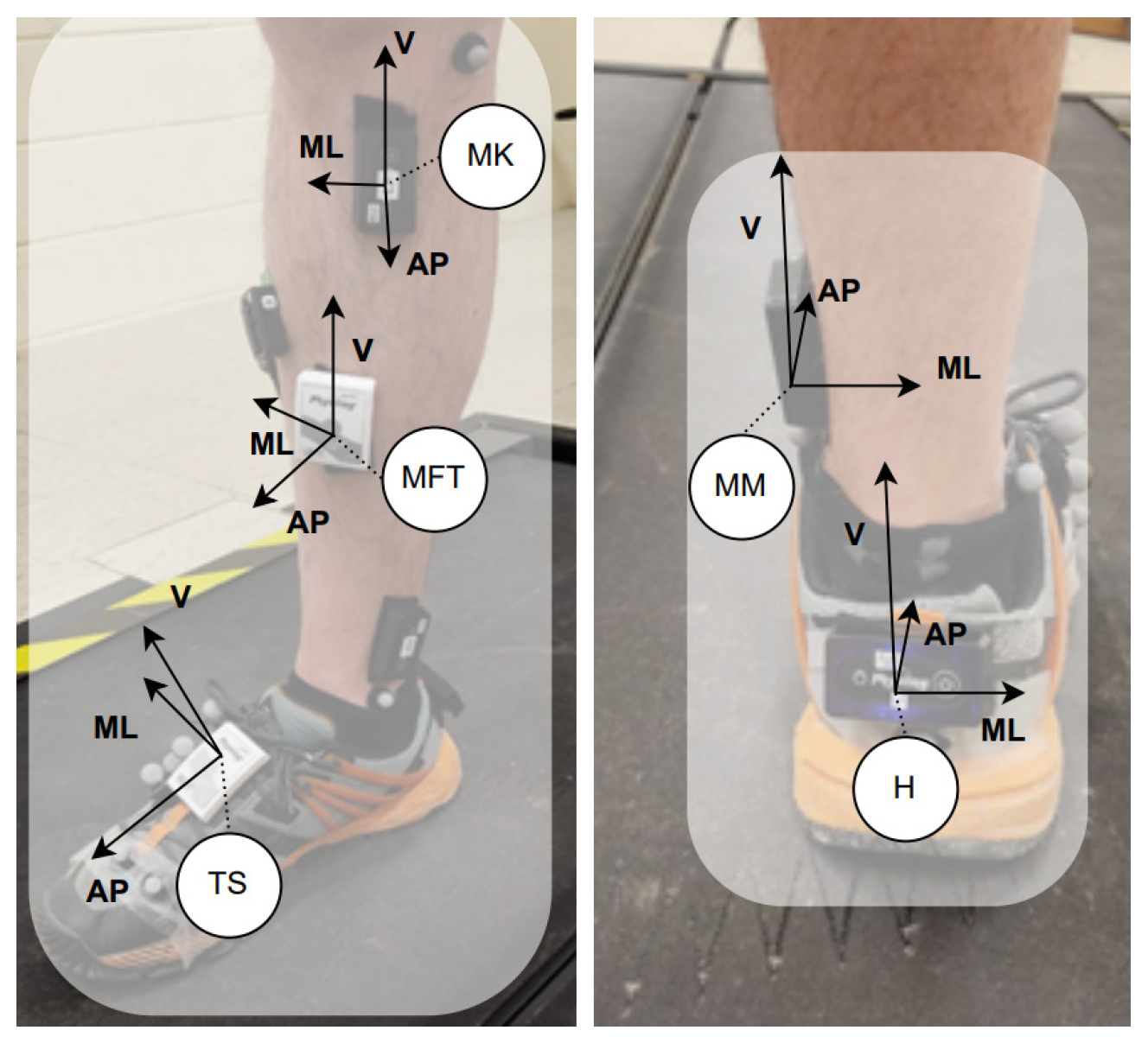
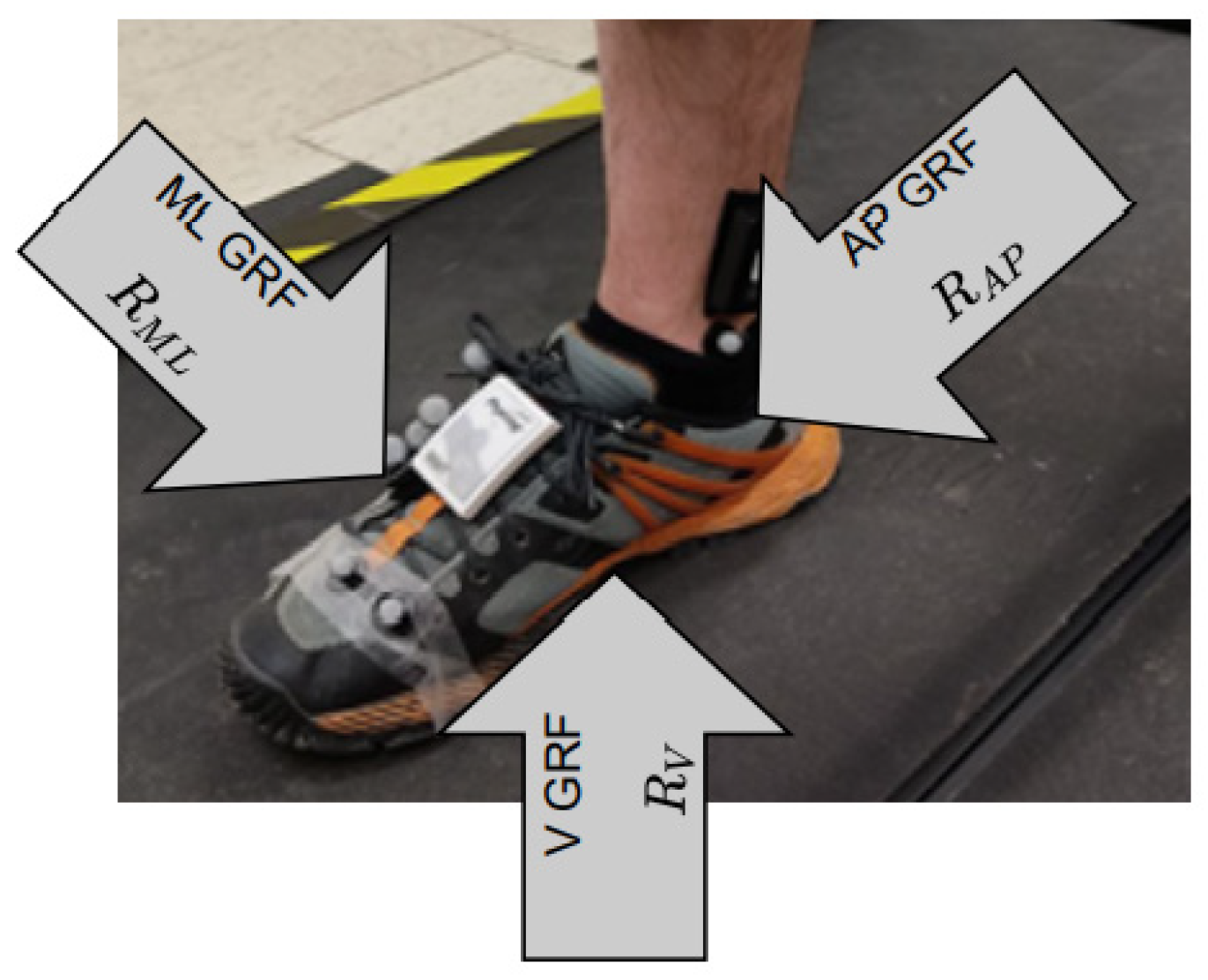
2.4.1. Experimental Data Used in the Network
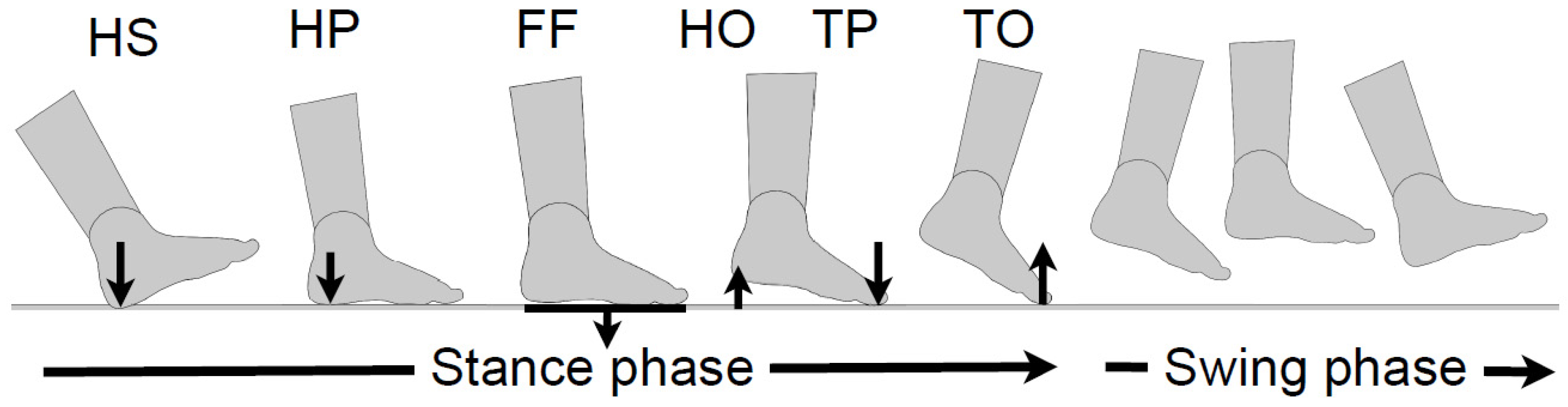
2.4.2. The Goal Data
- HS: the rising edge of the VGRF.
- HP: the first maximal peak obtained after the HS.
- FF: the minimal peak obtained after the HP. For some walking patterns, especially for slow, as well as for MKOA participants, no minimal peaks in the middle of the stance phase were found. The FF was then defined by the middle point between HP and TP.
- TP: the last maximal peaks of the VGRF.
- TO: the falling edge of the VGRF.
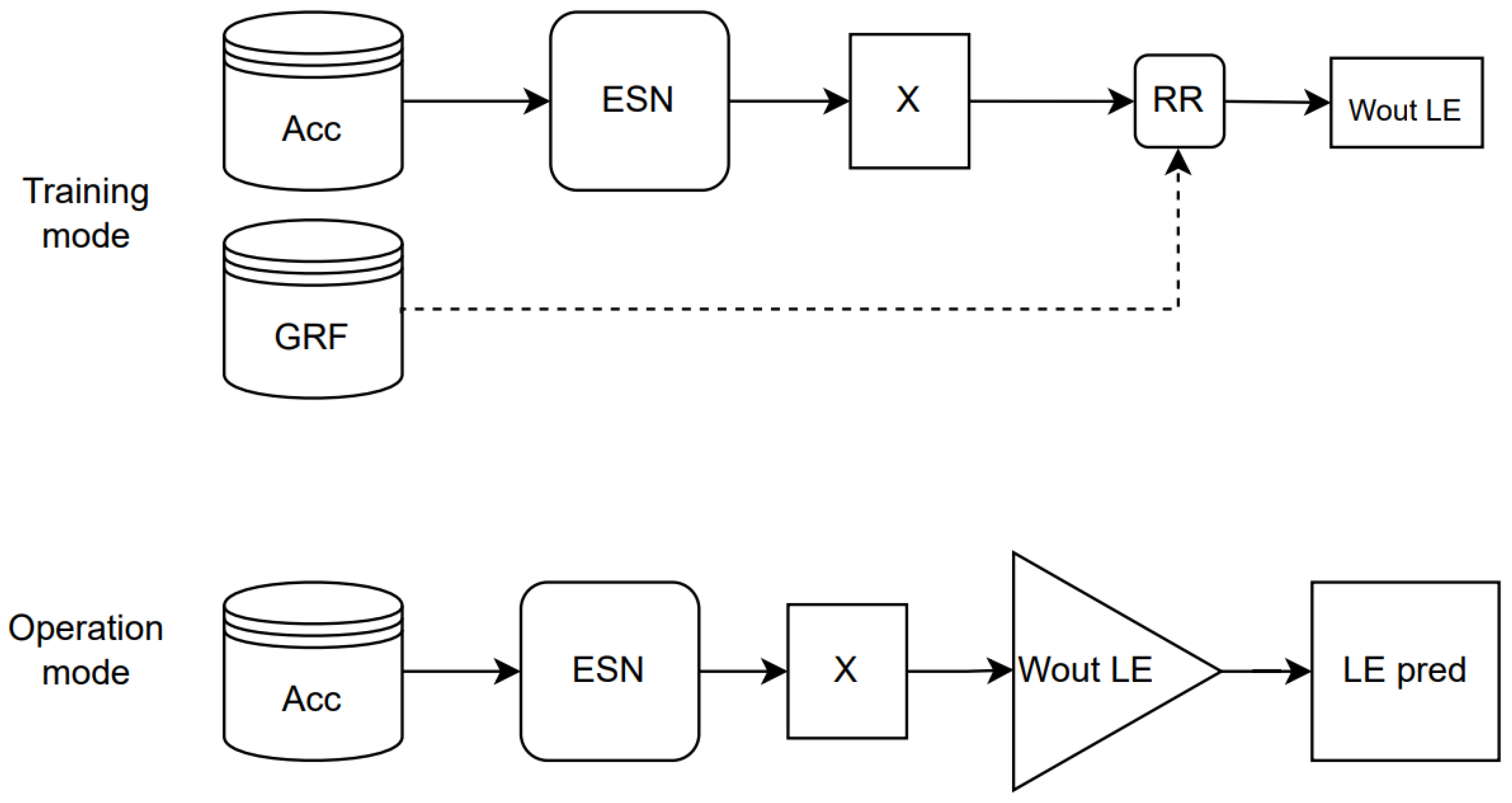
2.4.3. ESN Formulation for Finding the Goal Data
2.5. Different Training Methods
2.5.1. Standard Training Method
2.5.2. Kernel Training
- Weighting variables
- 2.
- Ridge regression training with weighting
2.6. Statistical Analysis
3. Results
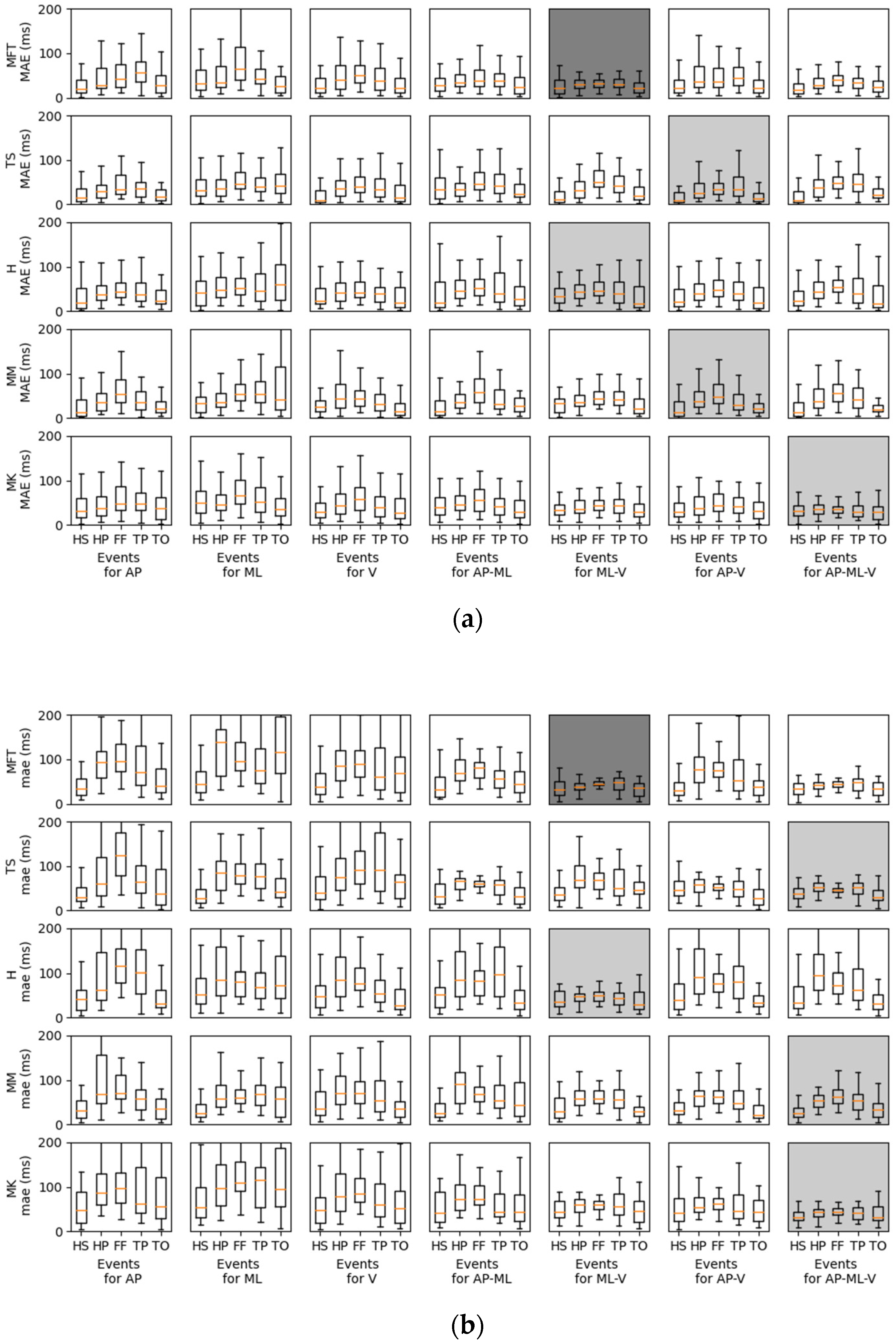
3.1. Gait Event Detection Prediction
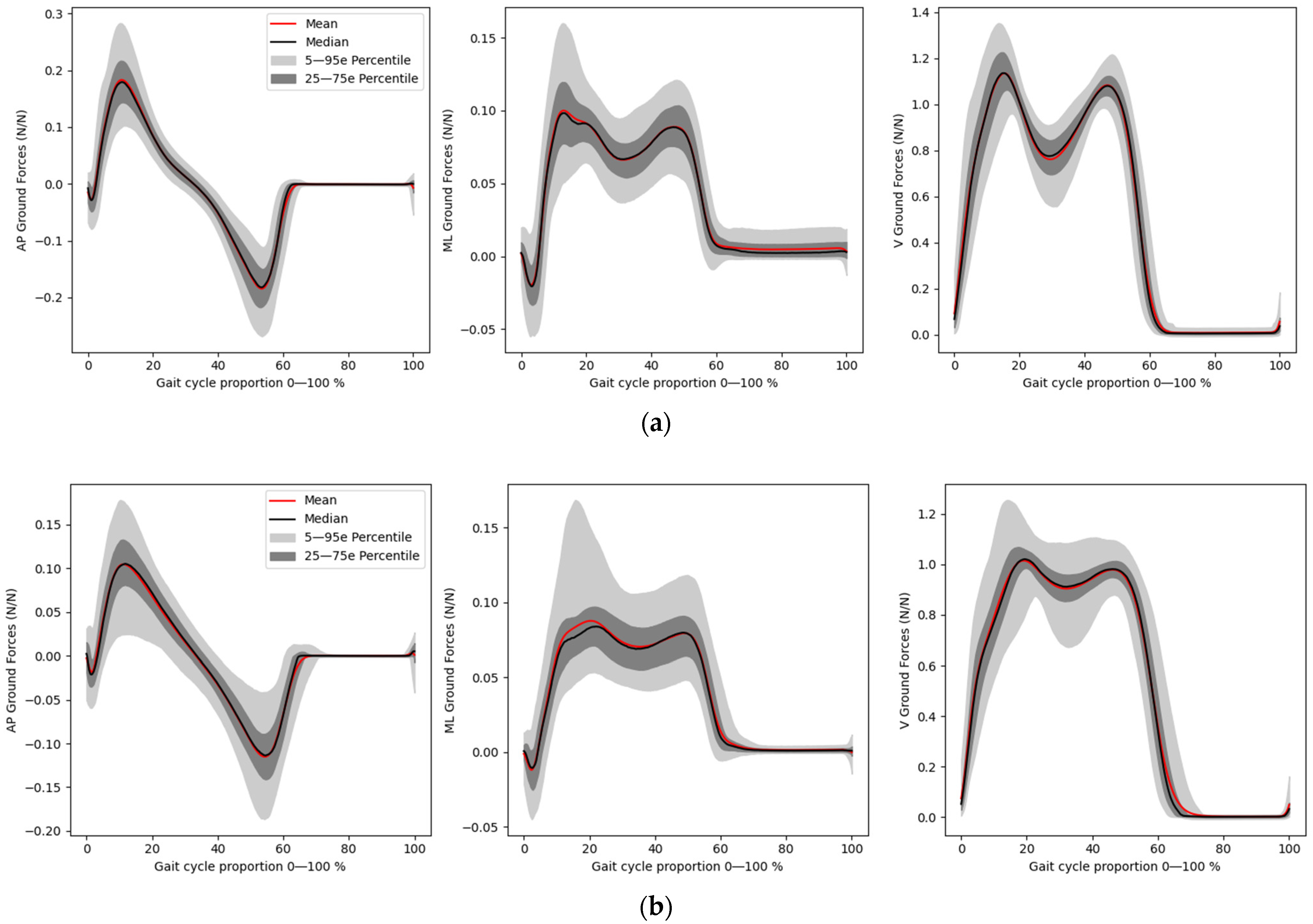
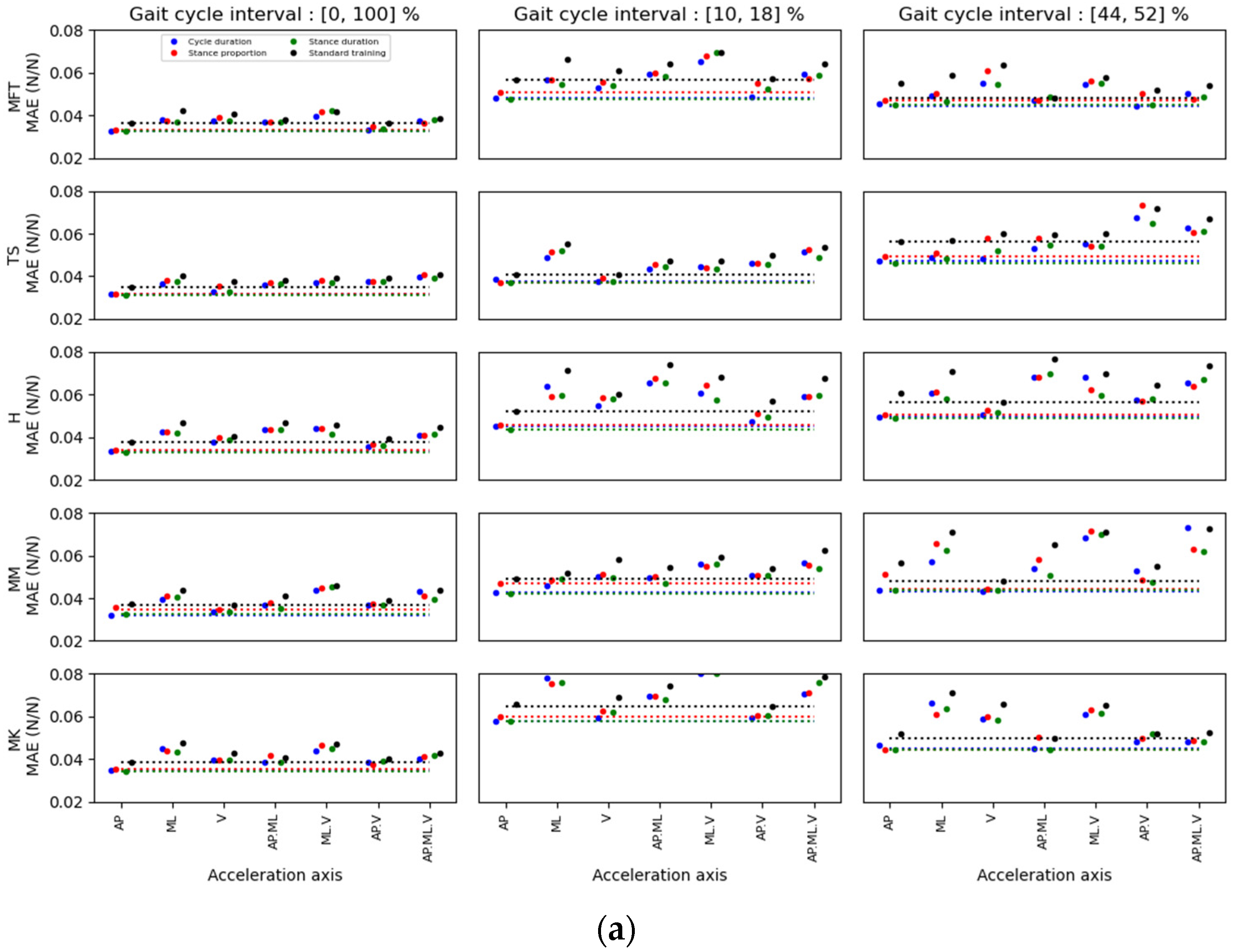
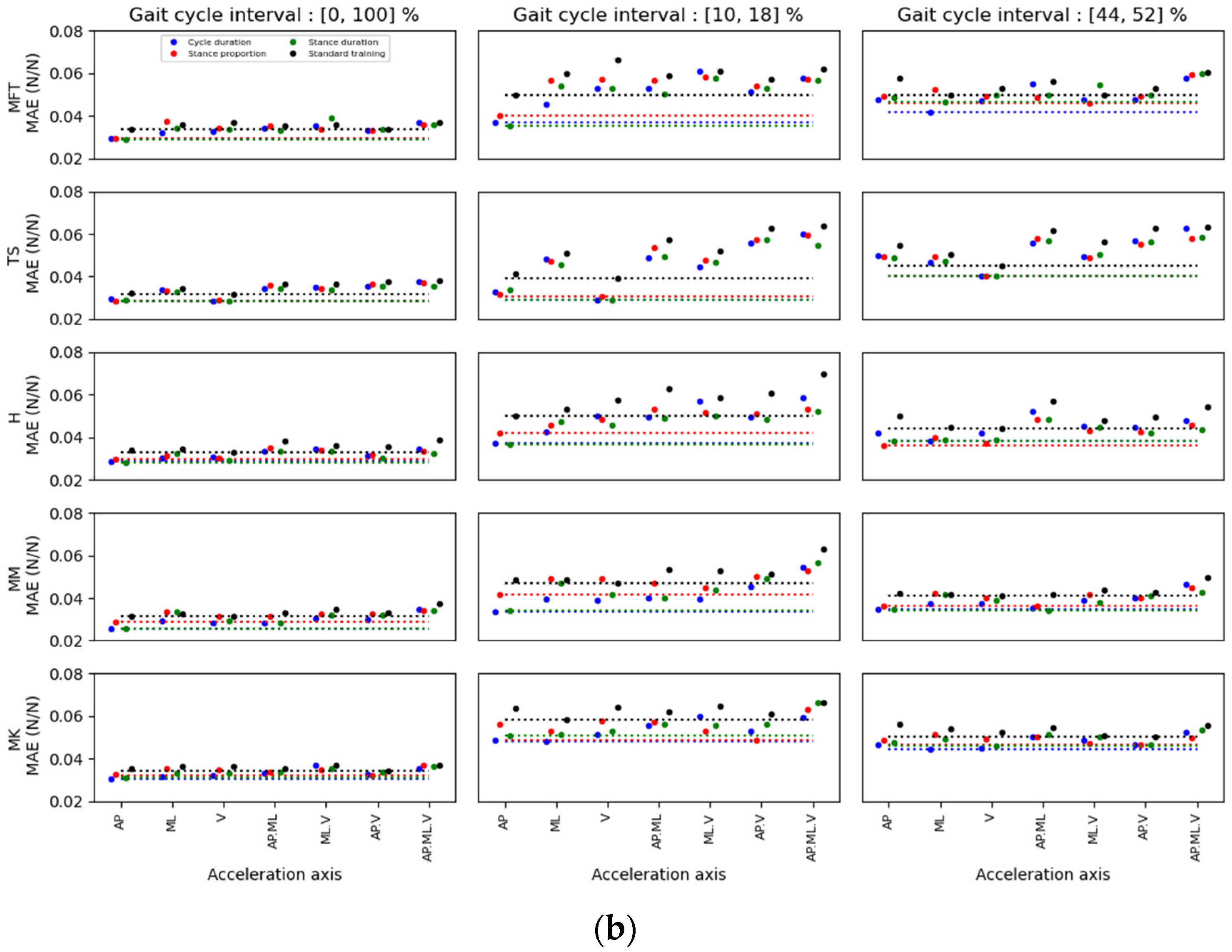
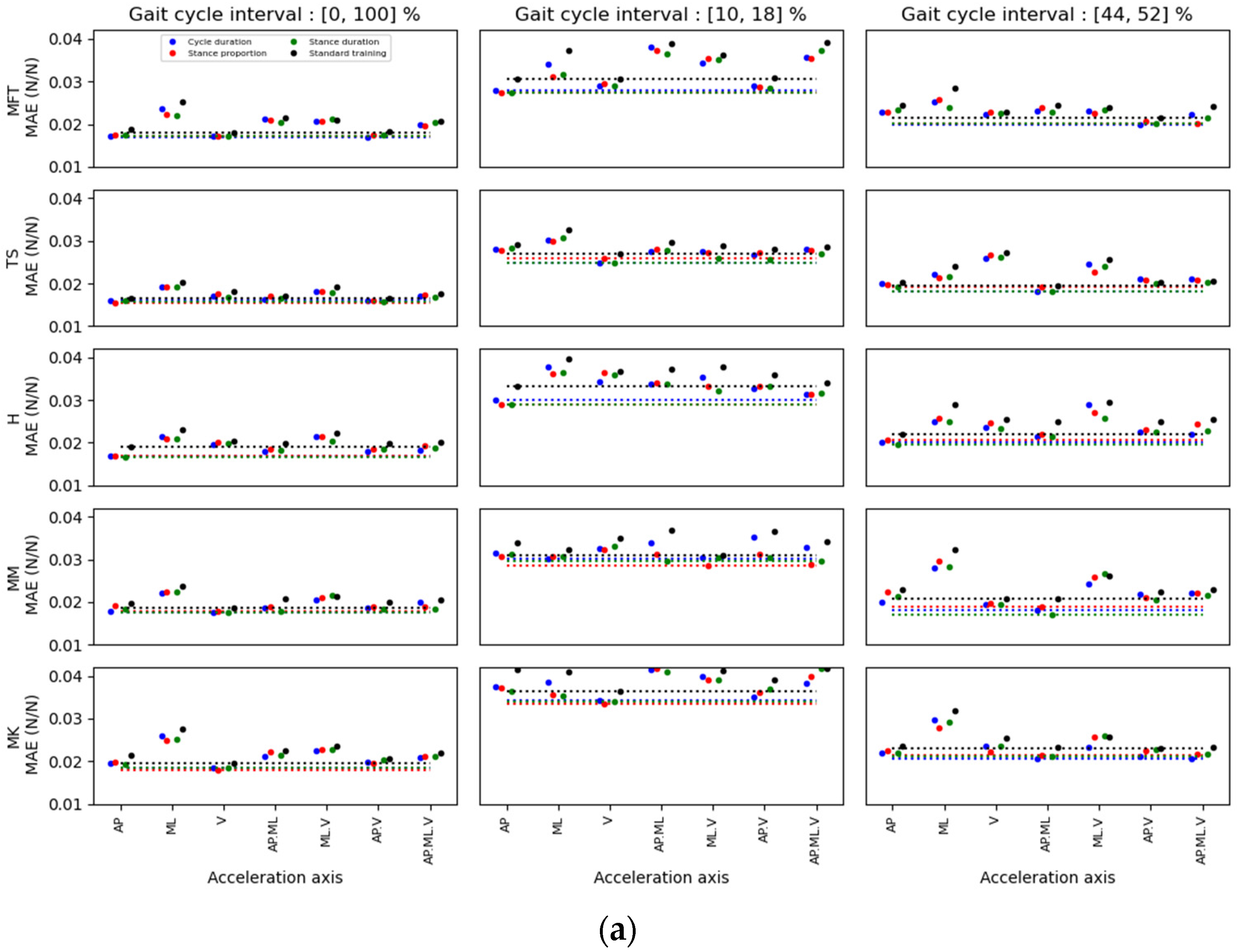
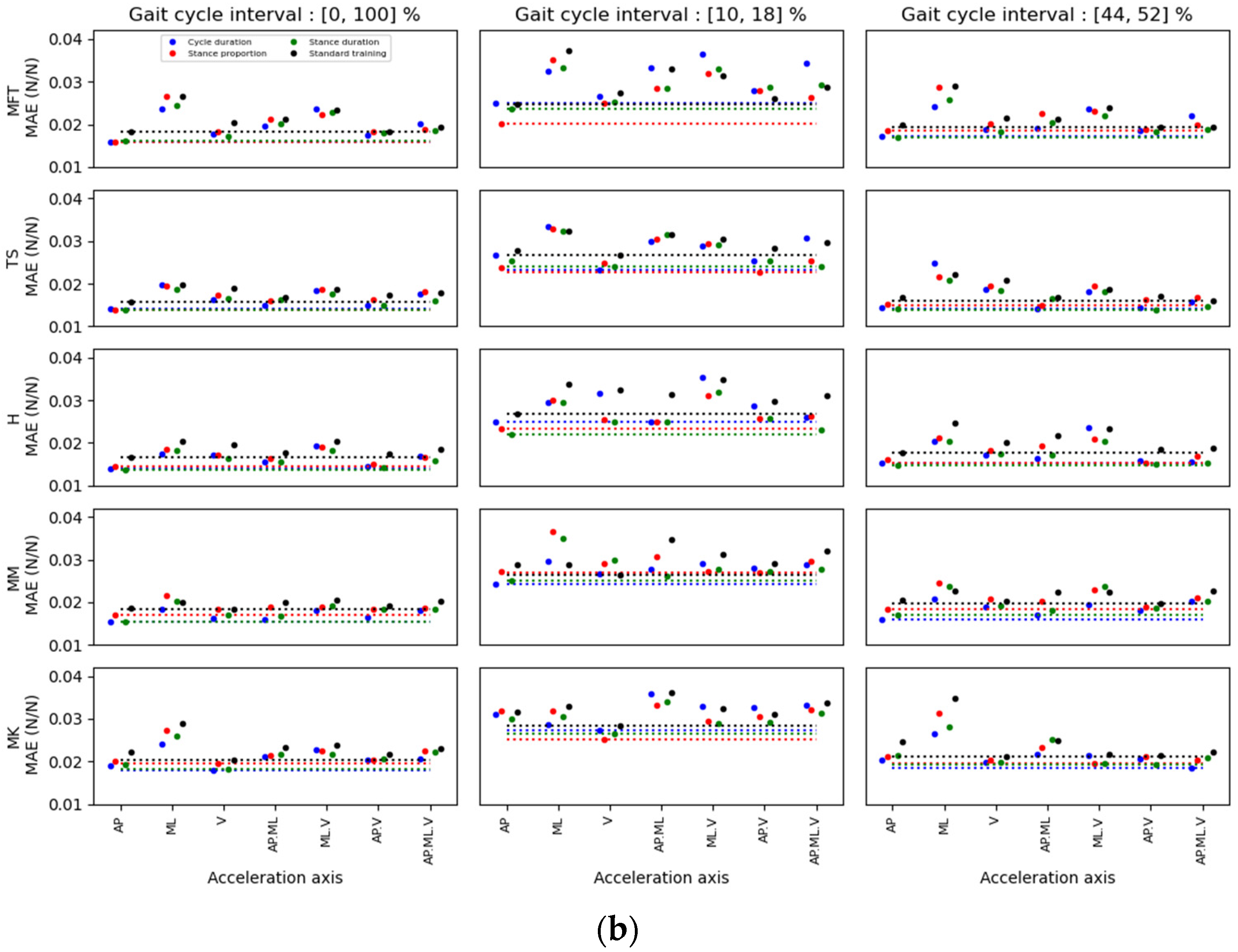
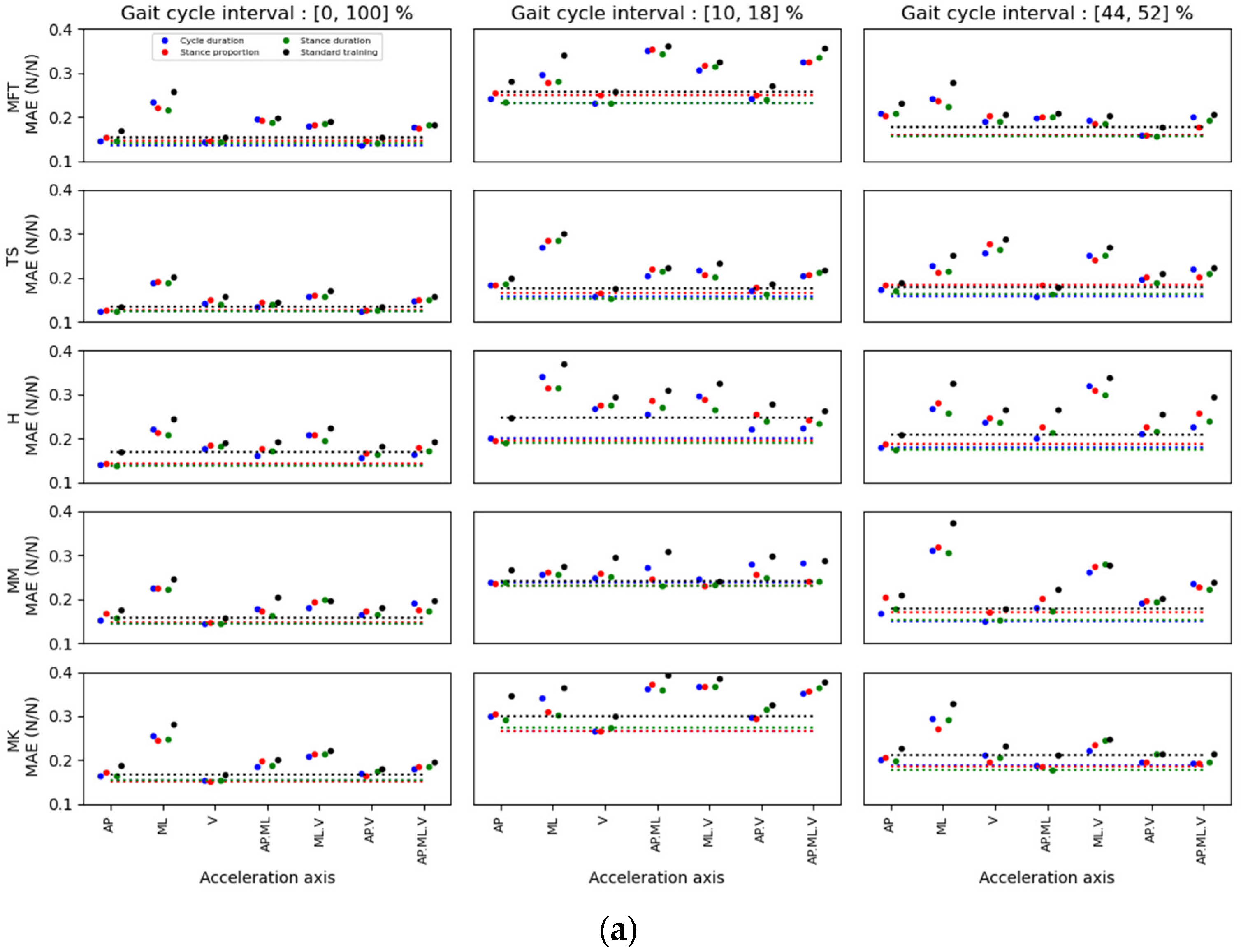
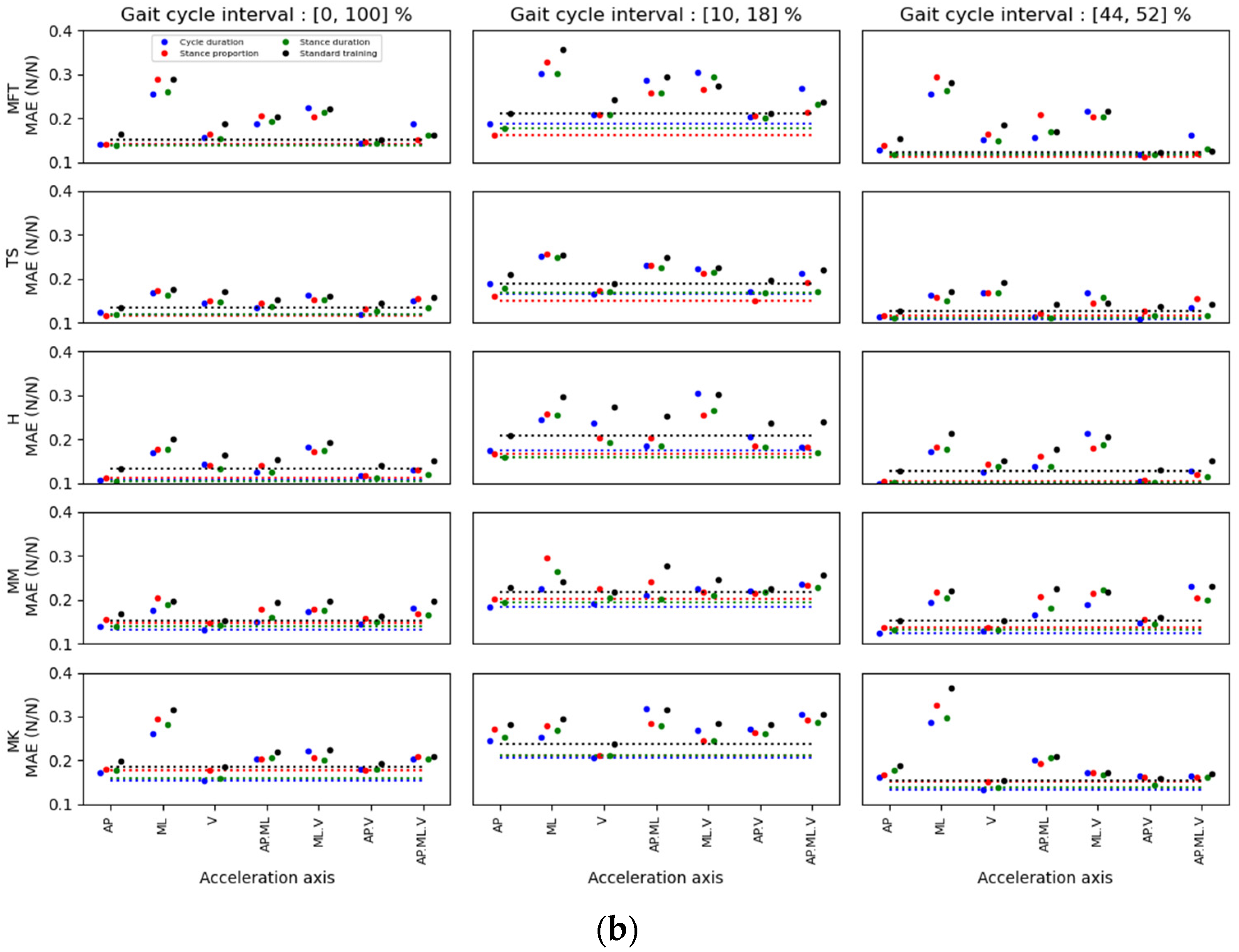
3.2. Ground Reaction Force Prediction
4. Discussion
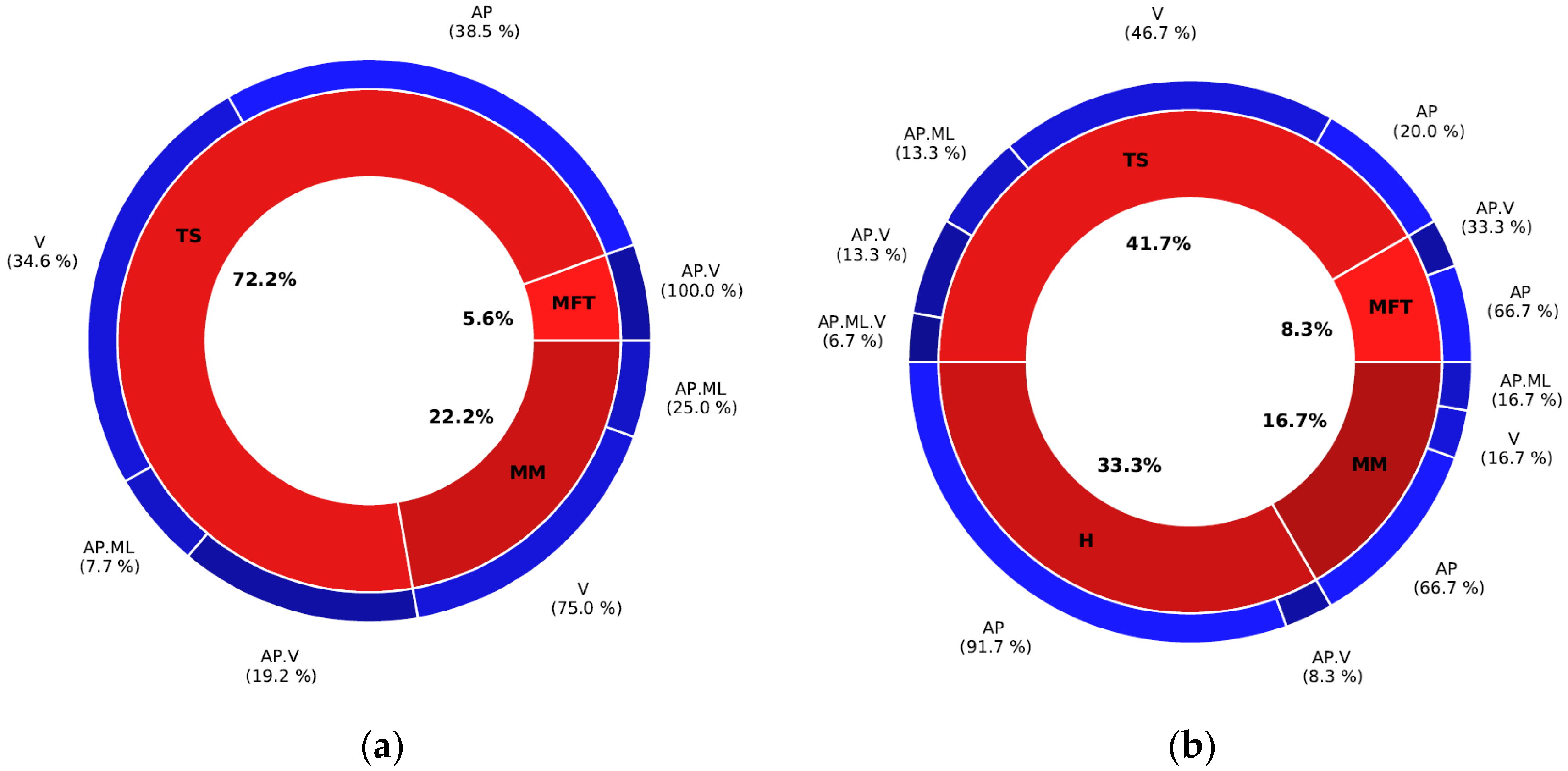
4.1. Determining the Best Location
4.2. Echo State Network Compared to Previous Algorithms
4.3. Limitations and Future Work
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Razak, A.; Zayegh, A.; Begg, R.; Wahab, Y. Foot plantar pressure measurement system: A review. Sensors 2012, 12, 9884–9912. [Google Scholar] [CrossRef] [PubMed]
- Ancillao, A.; Tedesco, S.; Barton, J.; O’Flynn, B. Indirect Measurement of Ground Reaction Forces and Moments by Means of Wearable Inertial Sensors: A Systematic Review. Sensors 2018, 18, 2564. [Google Scholar] [CrossRef]
- Mills, K.; Hunt, M.; Ferber, R. Biomechanical Deviations During Level Walking Associated with Knee Osteoarthritis: A Systematic Review and Meta-Analysis. Arthritis Care Res. 2013, 65, 1643–1665. [Google Scholar] [CrossRef] [PubMed]
- Childs, J.; Sparto, P.; Fitzgerald, G.; Bizzini, M.; Irrgang, J. Alterations in lower extremity movement and muscle activation patterns in individuals with knee osteoarthritis. Clin. Biomech. 2004, 19, 44–49. [Google Scholar] [CrossRef] [PubMed]
- Elbaz, A.; Mor, A.; Segal, G.; Debi, R.; Shazar, N.; Herman, A. Novel classification of knee osteoarthritis severity based on spatiotemporal gait analysis. Osteoarthr. Cartil. 2014, 22, 457–463. [Google Scholar] [CrossRef] [PubMed]
- Shafizadegan, Z.; Karimi, M.; Shafizadegan, F.; Rezaeian, Z. Evaluation of Ground Reaction Forces in Patients with Various Severities of Knee Osteoarthritis. J. Mech. Med. Biol. 2015, 16, 1650003. [Google Scholar] [CrossRef]
- Mündermann, A.; Dyrby, C.; Andriacchi, T. Secondary gait changes in patients with medial compartment knee osteoarthritis: Increased load at the ankle, knee, and hip during walking. Arthritis Rheum. 2005, 52, 2835–2844. [Google Scholar] [CrossRef]
- Ancillao, A. Stereophotogrammetry in Functional Evaluation: History and Modern Protocols. In Modern Functional Evaluation Methods for Muscle Strength and Gait Analysis; Springer: Berlin/Heidelberg, Germany, 2018; pp. 1–29. [Google Scholar]
- Franěk, M. Environmental Factors Influencing Pedestrian Walking Speed. Percept. Mot. Ski. 2013, 116, 992–1019. [Google Scholar] [CrossRef]
- Najafi, B.; Khan, T.; Wrobel, J. Laboratory in a box: Wearable sensors and its advantages for gait analysis. Annu. Int. Conf. IEEE Eng. Med. Biol. Soc. IEEE Eng. Med. Biol. Soc. Annu. Int. Conf. 2011, 2011, 6507–6510. [Google Scholar] [CrossRef]
- van der Krogt, M.; Sloot, L.; Harlaar, J. Overground versus self-paced treadmill walking in a virtual environment in children with cerebral palsy. Gait Posture 2014, 40, 587–593. [Google Scholar] [CrossRef]
- Frost, R.; Cass, C. A Load Cell and Sole Assembly for Dynamic Pointwise Vertical Force Measurement in Walking. Eng. Med. 1981, 10, 45–50. [Google Scholar] [CrossRef]
- Liu, T.; Inoue, Y.; Shibata, K. Wearable force sensor with parallel structure for measurement of ground-reaction force. Measurement 2007, 40, 644–653. [Google Scholar] [CrossRef]
- Chuah, M.; Kim, S. Enabling Force Sensing During Ground Locomotion: A Bio-Inspired, Multi-Axis, Composite Force Sensor Using Discrete Pressure Mapping. IEEE Sens. J. 2014, 14, 1693–1703. [Google Scholar] [CrossRef]
- Cordero, A.F.; Koopman, H.; van der Helm, F. Use of pressure insoles to calculate the complete ground reaction forces. J. Biomech. 2004, 37, 1427–1432. [Google Scholar] [CrossRef] [PubMed]
- Fong, D.-P.; Chan, Y.-Y.; Hong, Y.; Yung, P.-H.; Fung, K.-Y.; Chan, K.-M. Estimating the complete ground reaction forces with pressure insoles in walking. J. Biomech. 2008, 41, 2597–2601. [Google Scholar] [CrossRef] [PubMed]
- Sharma, D.; Davidson, P.; Müller, P.; Piché, R. Indirect Estimation of Vertical Ground Reaction Force from a Body-Mounted INS/GPS Using Machine Learning. Sensors 2021, 21, 1553. [Google Scholar] [CrossRef]
- Horsley, B.; Tofari, P.; Halson, S.; Kemp, J.; Dickson, J.; Maniar, N.; Cormack, S. Does Site Matter? Impact of Inertial Measurement Unit Placement on the Validity and Reliability of Stride Variables During Running: A Systematic Review and Meta-analysis. Sport. Med. 2021, 51, 1449–1489. [Google Scholar] [CrossRef]
- Karatsidis, A.; Bellusci, G.; Schepers, H.; de Zee, M.; Andersen, M.; Veltink, P. Estimation of Ground Reaction Forces and Moments during Gait Using Only Inertial Motion Capture. Sensors 2016, 47, 75. [Google Scholar] [CrossRef]
- Neugebauer, J.; Hawkins, D.; Beckett, L. Estimating youth locomotion ground reaction forces using an accelerometer-based activity monitor. PLoS ONE 2012, 7, e48182. [Google Scholar] [CrossRef]
- Lafuente, R.; Belda, J.; Sánchez-Lacuesta, J.; Soler, C.; Prat, J. Design and test of neural networks and statistical classifiers in computer-aided movement analysis: A case study on gait analysis. Clin. Biomech. 1998, 13, 216–229. [Google Scholar] [CrossRef]
- Holzreiter, S.; Köhle, M. Assessment of gait patterns using neural networks. J. Biomech. 1993, 26, 645–651. [Google Scholar] [CrossRef] [PubMed]
- Leporace, G.; Batista, L.; Metsavaht, L.; Nadal, J. Residual analysis of ground reaction forces simulation during gait using neural networks with different configurations. Annu. Int. Conf. IEEE Eng. Med. Biol. Soc. IEEE Eng. Med. Biol. Soc. Annu. Int. Conf. 2015, 2015, 2812–2815. [Google Scholar] [CrossRef]
- Ngoh, K.-H.; Gouwanda, D.; Gopalai, A.; Chong, Y. Estimation of vertical ground reaction force during running using neural network model and uniaxial accelerometer. J. Biomech. 2018, 76, 269–273. [Google Scholar] [CrossRef] [PubMed]
- Chew, D.-K.; Ngoh, K.-H.; Gouwanda, D.; Gopalai, A. Estimating running spatial and temporal parameters using an inertial sensor. Sport. Eng. 2018, 21, 115–122. [Google Scholar] [CrossRef]
- Guo, Y.; Storm, F.; Zhao, Y.; Billings, S.; Pavic, A.; Mazzà, C.; Guo, L.-Z. A New Proxy Measurement Algorithm with Application to the Estimation of Vertical Ground Reaction Forces Using Wearable Sensors. Sensors 2017, 17, 2181. [Google Scholar] [CrossRef]
- Cerrito, A.; Bichsel, L.; Radlinger, L.; Schmid, S. Reliability and validity of a smartphone-based application for the quantification of the sit-to-stand movement in healthy seniors. Gait Posture 2015, 41, 409–413. [Google Scholar] [CrossRef]
- Wundersitz, D.; Netto, K.; Aisbett, B.; Gastin, P. Validity of an upper-body-mounted accelerometer to measure peak vertical and resultant force during running and change-of-direction tasks. Sport. Biomech. 2013, 12, 403–412. [Google Scholar] [CrossRef]
- Mazzà, C.; Iosa, M.; Pecoraro, F.; Cappozzo, A. Control of the upper body accelerations in young and elderly women during level walking. J. Neuroeng. Rehabil. 2008, 5, 30. [Google Scholar] [CrossRef]
- Iijima, H.; Eguchi, R.; Aoyama, T.; Takahashi, M. Trunk movement asymmetry associated with pain, disability, and quadriceps strength asymmetry in individuals with knee osteoarthritis: A cross-sectional study. Osteoarthr. Cartil. 2019, 27, 248–256. [Google Scholar] [CrossRef]
- Panebianco, G.P.; Bisi, M.; Stagni, R.; Fantozzi, S. Analysis of the performance of 17 algorithms from a systematic review: Influence of sensor position, analysed variable and computational approach in gait timing estimation from IMU measurements. Gait Posture 2018, 66, 76–82. [Google Scholar] [CrossRef]
- Ohtaki, Y.; Sagawa, K.; Inooka, H. A Method for Gait Analysis in a Daily Living Environment by Body-Mounted Instruments. JSME Int. J. Ser. C Mech. Syst. Mach. Elem. Manuf. 2001, 44, 1125–1132. [Google Scholar] [CrossRef]
- Thiel, D.; Shepherd, J.; Espinosa, H.; Kenny, M.; Fischer, K.; Worsey, M.; Matsuo, A.; Wada, T. Predicting Ground Reaction Forces in Sprint Running Using a Shank Mounted Inertial Measurement Unit. Proceedings 2018, 2, 199. [Google Scholar] [CrossRef]
- Jaeger, H. The" echo state" approach to analysing and training recurrent neural networks-with an erratum note’. Bonn. Ger. Ger. Natl. Res. Cent. Inf. Technol. GMD Tech. Rep. 2001, 148, 13. [Google Scholar]
- Yang, S.; Li, Q. Inertial sensor-based methods in walking speed estimation: A systematic review. Sensors 2012, 12, 6102–6116. [Google Scholar] [CrossRef] [PubMed]
- Barazani, B.; Dion, G.; Morissette, J.-F.; Beaudoin, L.; Sylvestre, J. Microfabricated Neuroaccelerometer: Integrating Sensing and Reservoir Computing in MEMS. J. Microelectromechanical Syst. 2020, 29, 338–347. [Google Scholar] [CrossRef]
- Lukoševičius, M. A Practical Guide to Applying Echo State Networks. In Neural Networks: Tricks of the Trade; Springer: Berlin/Heidelberg, Germany, 2012; pp. 659–686. [Google Scholar]
- Lukoševičius, M.; Jaeger, H. Reservoir computing approaches to recurrent neural network training. Comput. Sci. Rev. 2009, 3, 127–149. [Google Scholar] [CrossRef]
- Wang, W.; Liang, X.; Assaad, M.; Heidari, H. Wearable wristworn gesture recognition using echo state network. In Proceedings of the 2019 26th IEEE International Conference on Electronics, Circuits and Systems (ICECS), Genoa, Italy, 27–29 November 2019; pp. 875–878. [Google Scholar]
- Cao, Y.; Huang, J.; Xiong, C. Single-layer learning-based predictive control with echo state network for pneumatic-muscle-actuators-driven exoskeleton. IEEE Trans. Cogn. Dev. Syst. 2020, 13, 80–90. [Google Scholar] [CrossRef]
- Choi, B.; Seo, C.; Lee, S.; Kim, B.; Kim, D. Swing Control of a Lower Extremity Exoskeleton Using Echo State Networks. IFAC-Pap. 2017, 50, 1328–1333. [Google Scholar] [CrossRef]
- Chiasson-Poirier, L.; Younesian, H.; Turcot, K.; Sylvestre, J. Detecting Gait Events from Accelerations Using Reservoir Computing. Sensors 2022, 22, 7180. [Google Scholar] [CrossRef]
- Altman, R.D. Classification of disease: Osteoarthritis. Semin. Arthritis Rheum. 1991, 20, 40–47. [Google Scholar] [CrossRef]
- Kellgren, J.; Lawrence, J. Radiological Assessment of Osteo-Arthrosis. Ann. Rheum. Dis. 1957, 16, 494–502. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Van Melick, N.; Meddeler, B.; Hoogeboom, T.; der Sanden, M.N.-V.; van Cingel, R. How to determine leg dominance: The agreement between self-reported and observed performance in healthy adults. PLoS ONE 2017, 12, e0189876. [Google Scholar] [CrossRef] [PubMed]
- Morales-Artacho, A.; García-Ramos, A.; Pérez-Castilla, A.; Padial, P.; Gomez, A.; Peinado, A.; Pérez-Córdoba, J.; Feriche, B. Muscle activation during power-oriented resistance training: Continuous vs. cluster set configurations. J. Strength Cond. Res. 2019, 33, S95–S102. [Google Scholar] [CrossRef] [PubMed]
- Astephen, J.; Deluzio, K. The Loading Response Phase of the Gait Cycle Is Important to Knee Osteoarthritis. Orthop. Proc. 2008, 90, 43. [Google Scholar] [CrossRef]
- Wiik, A.; Aqil, A.; Brevadt, M.; Jones, G.; Cobb, J. Abnormal ground reaction forces lead to a general decline in gait speed in knee osteoarthritis patients. World J. Orthop. 2017, 8, 322–328. [Google Scholar] [CrossRef]
- Neugebauer, J.; Collins, K.; Hawkins, D. Ground reaction force estimates from ActiGraph GT3X+ hip accelerations. PLoS ONE 2014, 9, e99023. [Google Scholar] [CrossRef]
- Romijnders, R.; Warmerdam, E.; Hansen, C.; Welzel, J.; Schmidt, G.; Maetzler, W. Validation of IMU-based gait event detection during curved walking and turning in older adults and Parkinson’s Disease patients. J. Neuroeng. Rehabil. 2021, 18, 28. [Google Scholar] [CrossRef]
- Costello, K.; Felson, D.; Neogi, T.; Segal, N.; Lewis, C.; Gross, K.; Nevitt, M.; Lewis, C.; Kumar, D. Ground reaction force patterns in knees with and without radiographic osteoarthritis and pain: Descriptive analyses of a large cohort (the Multicenter Osteoarthritis Study). Osteoarthr. Cartil. 2021, 29, 1138–1146. [Google Scholar] [CrossRef]
- Lara, O.D.; Labrador, M.A. A Survey on Human Activity Recognition using Wearable Sensors. IEEE Commun. Surv. Tutor. 2013, 15, 1192–1209. [Google Scholar] [CrossRef]
- Wang, C.; Chan, P.; Lam, B.; Wang, S.; Zhang, J.; Chan, Z.; Chan, R.; Ho, K.; Cheung, R. Real-Time Estimation of Knee Adduction Moment for Gait Retraining in Patients with Knee Osteoarthritis. IEEE Trans. Neural Syst. Rehabil. Eng. 2020, 28, 888–894. [Google Scholar] [CrossRef]
- Jacobs, D.A.; Ferris, D.P. Estimation of ground reaction forces and ankle moment with multiple, low-cost sensors. J. Neuroeng. Rehabil. 2015, 12, 90. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chereshnev, R.; Kertész-Farkas, A. RapidHARe: A computationally inexpensive method for real-time human activity recognition from wearable sensors. J. Ambient. Intell. Smart Environ. 2018, 10, 377–391. [Google Scholar] [CrossRef]
- Alomar, M.L.; Skibinsky-Gitlin, E.S.; Frasser, C.F.; Canals, V.; Isern, E.; Roca, M.; Rosselló, J.L. Efficient parallel implementation of reservoir computing systems. Neural Comput. Appl. 2020, 32, 2299–2313. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Characteristics | Healthy (n = 27) | MKOA (n = 18) |
|---|---|---|
| Age (y) | 36.66 ± 4.24 | 65.63 ± 7.32 |
| Gait velocity (m/s) | 1.28 ± 0.13 | 0.75 ± 0.23 |
| Height (m) | 1.72 ± 0.08 | 1.65 ± 0.12 |
| Mass (kg) | 73.11 ± 16.45 | 80.51 ± 15.27 |
| Axes | AP | ML | V | AP-ML | ML-V | AP-V | AP-ML-V |
|---|---|---|---|---|---|---|---|
| Hyperparameters | Symbol | Value |
|---|---|---|
| Number of nodes | N | 100 |
| Leaking rate | α | 0.1053 |
| W spectral radius | ρ | 0.7471 |
| W sparsity | ρ | 0.21 |
| Regularization parameter | γ | 1 × 10−6 |
| Axis | Event | MAE (ms) by Location | ||||
|---|---|---|---|---|---|---|
| MFT | TS | H | MM | MK | ||
| AP | HS | 19.49 | 14.84 | 18.92 | 12.18 | 30.80 |
| HP | 28.10 | 28.68 | 37.38 | 35.13 | 37.43 | |
| FF | 42.24 | 34.63 | 44.61 | 54.03 | 47.24 | |
| TP | 55.71 | 36.72 | 37.81 | 34.68 | 48.29 | |
| TO | 27.06 | 16.92 | 23.51 | 22.05 | 36.94 | |
| ML | HS | 31.92 | 31.88 | 41.08 | 33.06 | 48.97 |
| HP | 34.77 | 36.82 | 48.63 | 35.42 | 45.68 | |
| FF | 63.75 | 45.14 | 52.76 | 54.17 | 66.13 | |
| TP | 42.92 | 40.81 | 45.37 | 54.69 | 51.53 | |
| TO | 25.63 | 42.57 | 60.14 | 40.78 | 35.89 | |
| V | HS | 21.43 | 9.58 | 23.92 | 24.79 | 30.26 |
| HP | 40.81 | 34.86 | 42.03 | 43.65 | 43.06 | |
| FF | 51.13 | 39.72 | 41.67 | 43.39 | 57.50 | |
| TP | 37.92 | 33.50 | 38.82 | 31.06 | 40.14 | |
| TO | 21.56 | 15.78 | 19.05 | 15.92 | 27.56 | |
| AP-ML | HS | 27.42 | 34.59 | 18.33 | 14.38 | 39.00 |
| HP | 34.50 | 34.67 | 46.52 | 36.28 | 46.52 | |
| FF | 38.17 | 46.39 | 51.79 | 58.42 | 55.15 | |
| TP | 37.66 | 42.37 | 39.19 | 32.26 | 40.79 | |
| TO | 23.75 | 22.68 | 27.06 | 27.34 | 28.64 | |
| ML-V | HS | 20.63 | 10.22 | 34.26 | 33.00 | 34.32 |
| HP | 30.78 | 32.70 | 44.70 | 36.39 | 35.81 | |
| FF | 32.36 | 49.31 | 46.91 | 42.98 | 43.68 | |
| TP | 30.71 | 40.97 | 39.86 | 41.39 | 42.63 | |
| TO | 21.49 | 19.74 | 17.57 | 21.70 | 29.73 | |
| AP-V | HS | 22.30 | 9.53 | 21.31 | 13.78 | 29.32 |
| HP | 36.89 | 24.87 | 40.00 | 37.43 | 38.38 | |
| FF | 36.58 | 33.97 | 47.36 | 47.88 | 42.97 | |
| TP | 44.31 | 33.03 | 38.82 | 30.34 | 42.50 | |
| TO | 21.03 | 13.75 | 18.30 | 21.46 | 31.29 | |
| AP-ML-V | HS | 17.74 | 9.66 | 23.24 | 12.66 | 31.00 |
| HP | 27.76 | 36.96 | 42.94 | 37.64 | 36.08 | |
| FF | 40.34 | 48.24 | 53.75 | 56.56 | 35.00 | |
| TP | 33.71 | 45.56 | 39.75 | 42.70 | 28.82 | |
| TO | 24.27 | 21.91 | 16.90 | 18.33 | 28.89 | |
| Axis | Event | MAE by Location | ||||
|---|---|---|---|---|---|---|
| MFT | TS | H | MM | MK | ||
| AP | HS | 33.10 | 29.88 | 42.39 | 31.79 | 47.30 |
| HP | 93.97 | 59.85 | 62.73 | 69.03 | 85.73 | |
| FF | 95.80 | 123.33 | 116.21 | 70.15 | 96.25 | |
| TP | 70.00 | 65.40 | 100.54 | 58.44 | 62.68 | |
| TO | 41.03 | 38.05 | 32.36 | 35.32 | 55.5 | |
| ML | HS | 44.19 | 28.39 | 52.02 | 24.46 | 54.29 |
| HP | 138.68 | 85.12 | 84.52 | 57.68 | 96.96 | |
| FF | 94.63 | 78.18 | 79.83 | 60.43 | 110.18 | |
| TP | 75.00 | 76.53 | 68.79 | 68.39 | 116.00 | |
| TO | 115.65 | 42.39 | 71.70 | 57.96 | 95.65 | |
| V | HS | 38.07 | 40.86 | 47.83 | 35.81 | 46.73 |
| HP | 84.52 | 75.31 | 84.11 | 71.43 | 79.00 | |
| FF | 89.50 | 92.17 | 75.85 | 70.19 | 84.55 | |
| TP | 59.86 | 90.45 | 54.71 | 54.13 | 60.98 | |
| TO | 68.91 | 64.07 | 26.62 | 35.89 | 52.59 | |
| AP-ML | HS | 30.97 | 31.76 | 51.22 | 24.58 | 41.14 |
| HP | 68.57 | 66.79 | 84.71 | 91.55 | 71.55 | |
| FF | 81.38 | 60.00 | 83.10 | 68.00 | 72.08 | |
| TP | 55.65 | 57.50 | 96.28 | 54.00 | 43.72 | |
| TO | 43.50 | 32.58 | 34.35 | 43.91 | 42.93 | |
| ML-V | HS | 32.29 | 36.63 | 35.88 | 28.87 | 43.14 |
| HP | 38.31 | 69.60 | 47.58 | 59.13 | 59.50 | |
| FF | 44.40 | 68.33 | 49.24 | 58.70 | 59.52 | |
| TP | 47.59 | 50.42 | 44.88 | 55.33 | 55.45 | |
| TO | 35.34 | 46.33 | 30.48 | 29.15 | 45.64 | |
| AP-V | HS | 30.33 | 46.07 | 39.41 | 31.29 | 42.29 |
| HP | 77.50 | 57.60 | 91.25 | 65.00 | 54.60 | |
| FF | 75.69 | 52.50 | 76.90 | 62.94 | 61.88 | |
| TP | 53.39 | 48.37 | 80.41 | 48.38 | 46.13 | |
| TO | 38.83 | 27.80 | 33.71 | 22.20 | 44.00 | |
| AP-ML-V | HS | 33.43 | 38.39 | 34.17 | 25.57 | 30.83 |
| HP | 42.79 | 53.28 | 95.88 | 54.05 | 44.04 | |
| FF | 44.13 | 46.67 | 73.41 | 62.73 | 44.05 | |
| TP | 48.63 | 52.13 | 62.18 | 53.81 | 41.12 | |
| TO | 34.80 | 30.15 | 32.29 | 32.50 | 31.90 | |
| Method | Interval (%) | Mean Absolute Error | Ave p/r Dist (1/σ) | Best Location | Best Axis | ||||
|---|---|---|---|---|---|---|---|---|---|
| Healthy | MKOA | Healthy | MKOA | Healthy | MKOA | Healthy | MKOA | ||
| Cycle duration | (0, 100) | 0.032 | 0.025 | −1.679 | -2.347 | TS | MM | AP | AP |
| (10, 18) | 0.037 | 0.029 | −1.742 | -2.271 | TS | TS | V | V | |
| (44, 52) | 0.043 | 0.035 | −1.400 | −1.776 | MM | MM | V | AP | |
| Stance proportion | (0, 100) | 0.032 | 0.028 | −2.077 | −2.037 | TS | TS | AP | AP |
| (10, 18) | 0.037 | 0.031 | −1.934 | −2.804 | TS | TS | AP | V | |
| (44, 52) | 0.044 | 0.036 | −1.549 | −1.750 | MM | H | V | AP | |
| Stance duration | (0, 100) | 0.031 | 0.026 | −1.829 | −2.429 | TS | MM | AP | AP |
| (10, 18) | 0.037 | 0.029 | −1.731 | −2.498 | TS | TS | AP | V | |
| (44, 52) | 0.043 | 0.034 | −1.338 | −1.898 | MM | MM | V | AP.ML | |
| Standard training | (0, 100) | 0.035 | 0.031 | −1.829 | −1.860 | TS | MM | AP | AP |
| (10, 18) | 0.041 | 0.039 | −1.851 | −2.483 | TS | TS | AP | V | |
| (44, 52) | 0.048 | 0.041 | −1.675 | −1.648 | MM | MM | V | V | |
| Method | Interval (%) | Mean Absolute Error | Ave p/r Dist (1/σ) | Best Location | Best Axes | ||||
|---|---|---|---|---|---|---|---|---|---|
| Healthy | MKOA | Healthy | MKOA | Healthy | MKOA | Healthy | MKOA | ||
| Cycle duration | (0, 100) | 0.016 | 0.014 | −1.490 | −1.577 | TS | H | AP.V | AP |
| (10, 18) | 0.025 | 0.023 | −1.942 | −1.753 | TS | TS | V | V | |
| (44, 52) | 0.018 | 0.014 | −1.680 | −1.618 | TS | TS | AP.ML | AP.ML | |
| Stance proportion | (0, 100) | 0.016 | 0.014 | −1.813 | −1.750 | TS | TS | AP | AP |
| (10, 18) | 0.026 | 0.020 | −1.582 | −2.214 | TS | MFT | V | AP | |
| (44, 52) | 0.019 | 0.015 | −1.510 | −1.568 | MM | TS | AP.ML | AP.ML | |
| Stance duration | (0, 100) | 0.016 | 0.014 | −1.580 | −1.604 | TS | H | AP.V | AP |
| (10, 18) | 0.025 | 0.022 | −1.742 | −1.839 | TS | H | V | AP | |
| (44, 52) | 0.017 | 0.014 | −2.037 | −1.618 | MM | TS | AP.ML | AP.V | |
| Standard training | (0, 100) | 0.016 | 0.016 | −1.707 | −1.572 | TS | TS | AP | AP |
| (10, 18) | 0.027 | 0.025 | −1.800 | −2.021 | TS | MFT | V | AP | |
| (44, 52) | 0.019 | 0.016 | −1.608 | −1.524 | TS | TS | AP.ML | AP.ML.V | |
| Method | Interval (%) | Mean Absolute Error | Ave p/r Dist (1/σ) | Best Location | Best Axes | ||||
|---|---|---|---|---|---|---|---|---|---|
| Healthy | MKOA | Healthy | MKOA | Healthy | MKOA | Healthy | MKOA | ||
| Cycle duration | (0, 100) | 0.123 | 0.107 | −1.555 | −1.559 | TS | H | AP.V | AP |
| (10, 18) | 0.157 | 0.166 | −1.996 | −1.530 | TS | TS | V | V | |
| (44, 52) | 0.150 | 0.099 | −1.586 | −1.418 | MM | H | V | AP | |
| Stance proportion | (0, 100) | 0.126 | 0.112 | −1.744 | −1.456 | TS | H | AP.V | AP |
| (10, 18) | 0.166 | 0.149 | −1.931 | −1.830 | TS | TS | V | AP.V | |
| (44, 52) | 0.158 | 0.105 | −1.558 | −1.294 | MFT | H | AP.V | AP | |
| Stance duration | (0, 100) | 0.125 | 0.105 | −1.649 | −1.539 | TS | H | AP | AP |
| (10, 18) | 0.153 | 0.158 | −1.992 | −1.590 | TS | H | V | AP | |
| (44, 52) | 0.154 | 0.101 | −1.513 | −1.304 | MM | H | V | AP.V | |
| Standard training | (0, 100) | 0.134 | 0.132 | −1.660 | −1.346 | TS | H | AP.V | AP |
| (10, 18) | 0.176 | 0.189 | −2.089 | −1.714 | TS | TS | V | V | |
| (44, 52) | 0.176 | 0.122 | −1.372 | −1.151 | MFT | MFT | AP.V | AP.V | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Havashinezhadian, S.; Chiasson-Poirier, L.; Sylvestre, J.; Turcot, K. Inertial Sensor Location for Ground Reaction Force and Gait Event Detection Using Reservoir Computing in Gait. Int. J. Environ. Res. Public Health 2023, 20, 3120. https://doi.org/10.3390/ijerph20043120
Havashinezhadian S, Chiasson-Poirier L, Sylvestre J, Turcot K. Inertial Sensor Location for Ground Reaction Force and Gait Event Detection Using Reservoir Computing in Gait. International Journal of Environmental Research and Public Health. 2023; 20(4):3120. https://doi.org/10.3390/ijerph20043120
Chicago/Turabian StyleHavashinezhadian, Sara, Laurent Chiasson-Poirier, Julien Sylvestre, and Katia Turcot. 2023. "Inertial Sensor Location for Ground Reaction Force and Gait Event Detection Using Reservoir Computing in Gait" International Journal of Environmental Research and Public Health 20, no. 4: 3120. https://doi.org/10.3390/ijerph20043120