
Quantifying Background Magnetic Fields at Marine Energy Sites: Challenges and Recommendations

 ,
,
Abstract
:1. Introduction
2. Materials and Methods
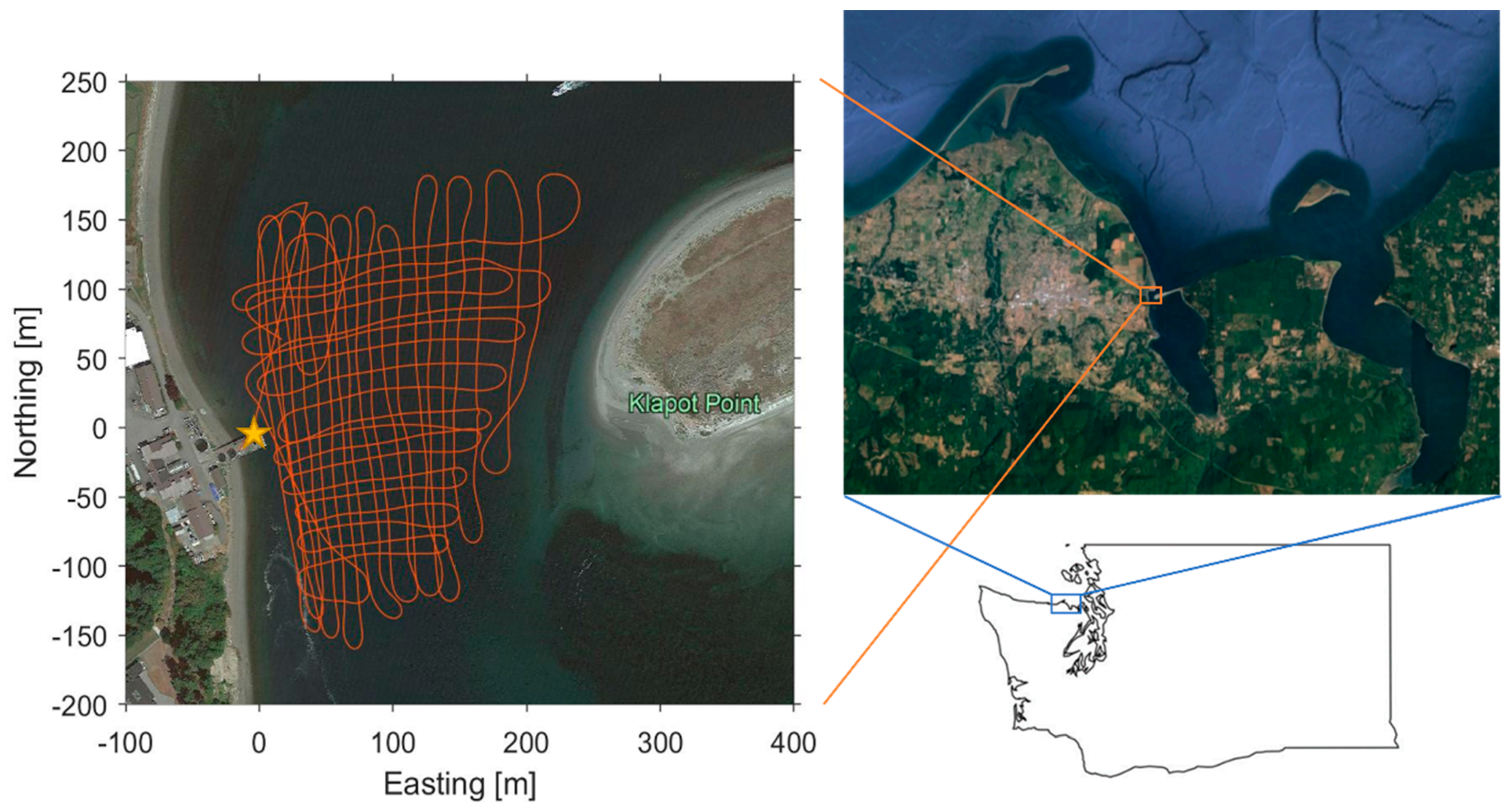
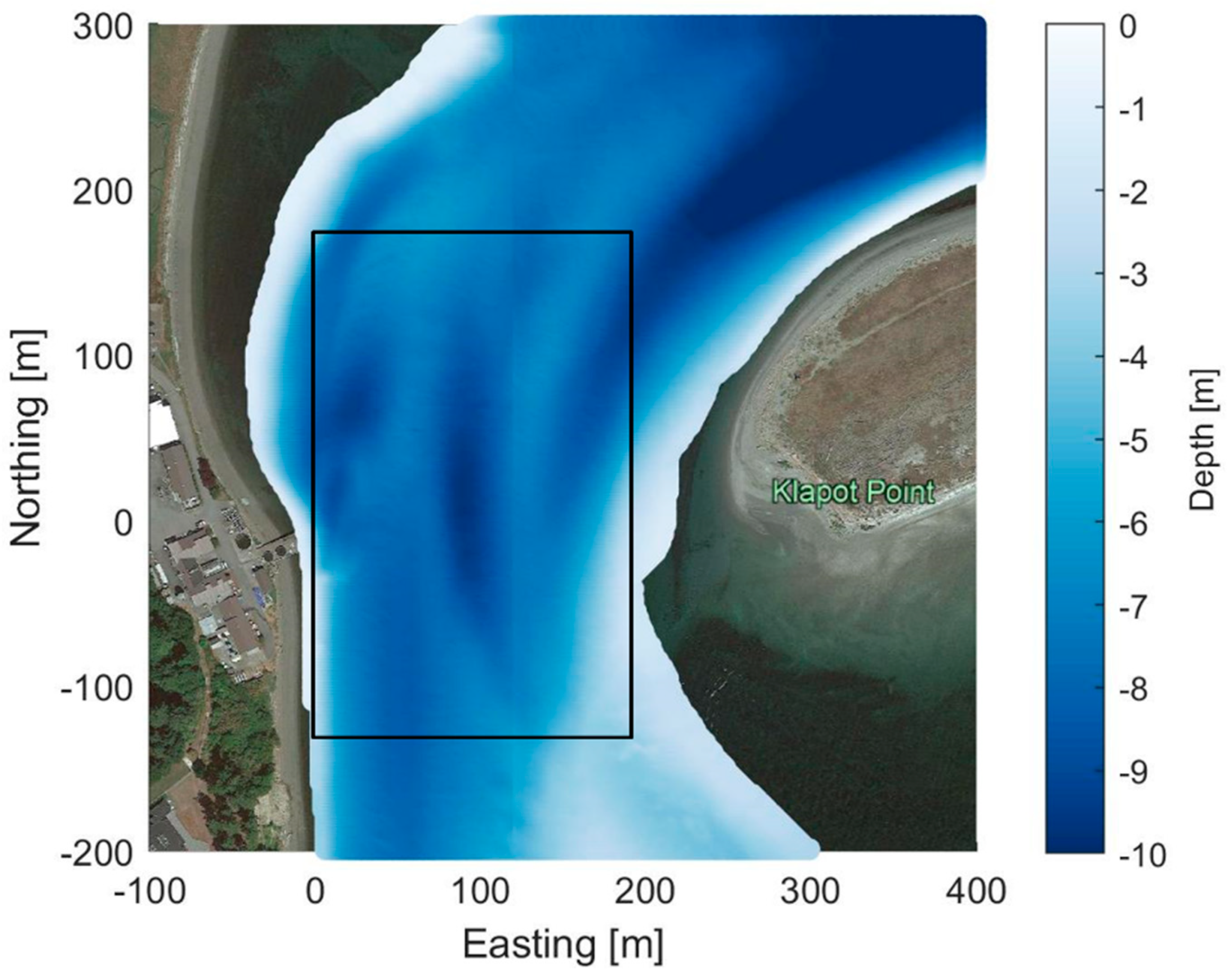
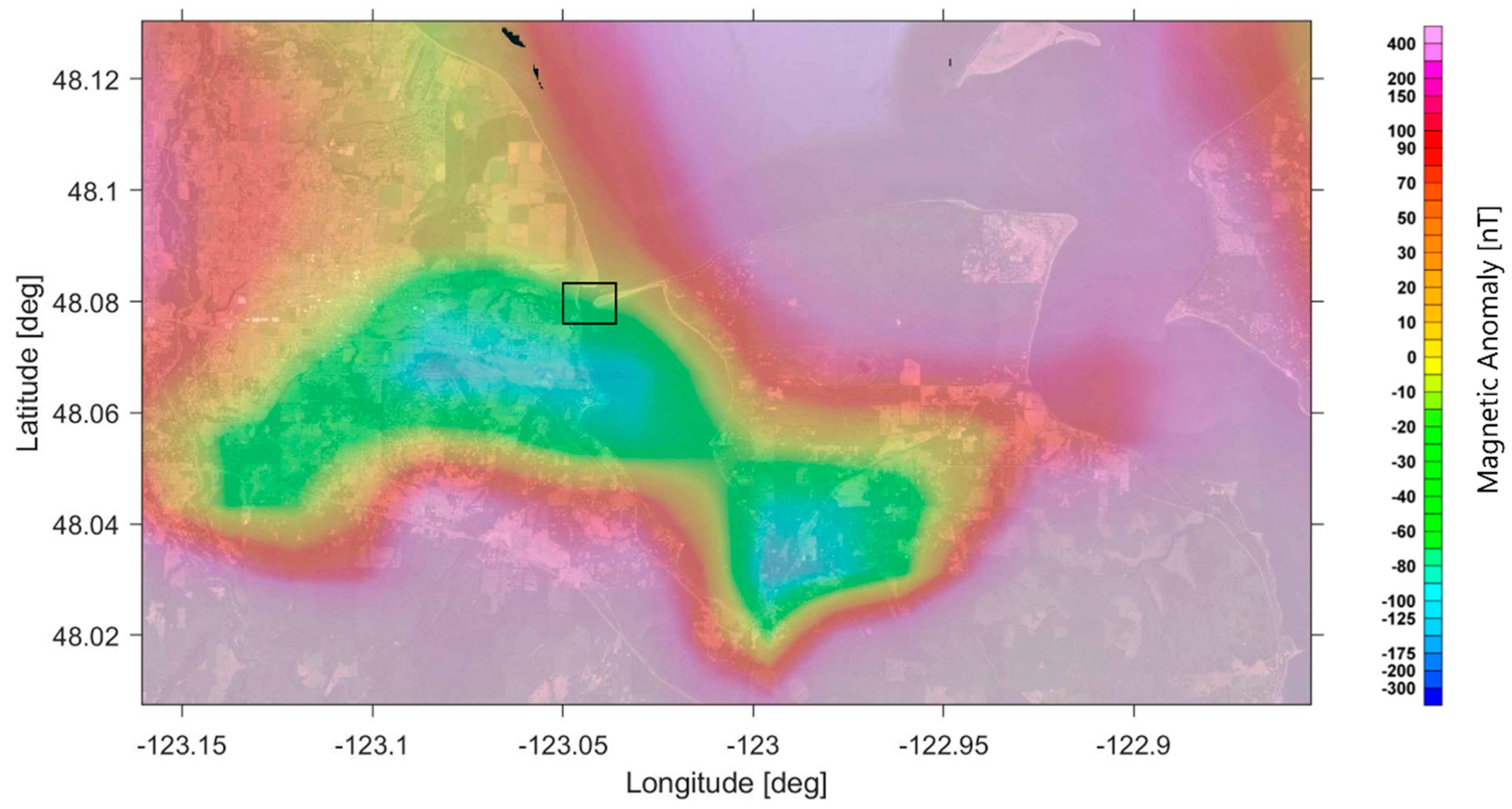
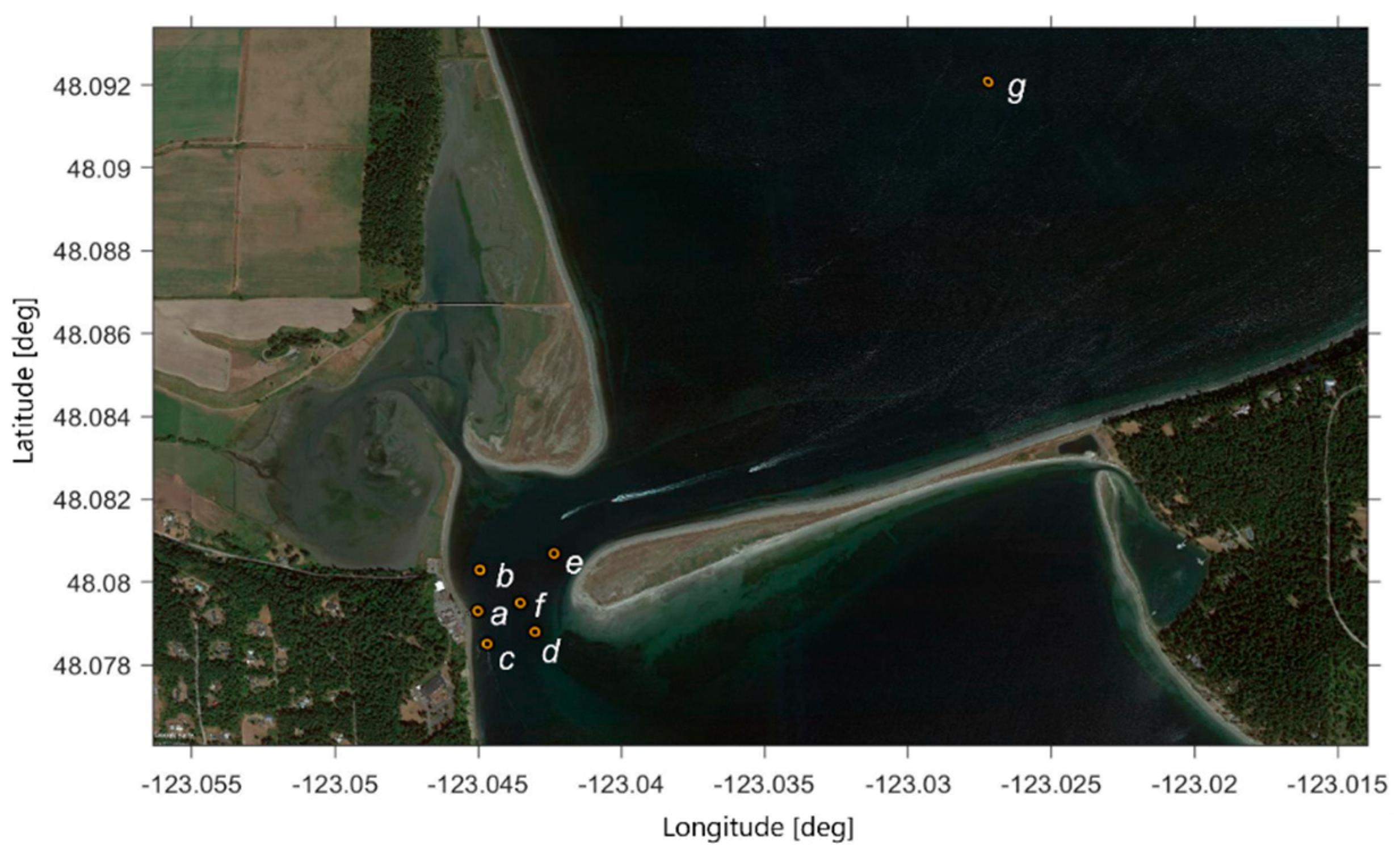
2.1. Study Site
2.2. Instruments for Detecting Magnetic Fields
2.3. Magnetic Field Open Water Testing
2.4. Background Magnetic Field Calculation
3. Results
3.1. Evaluation of Instruments
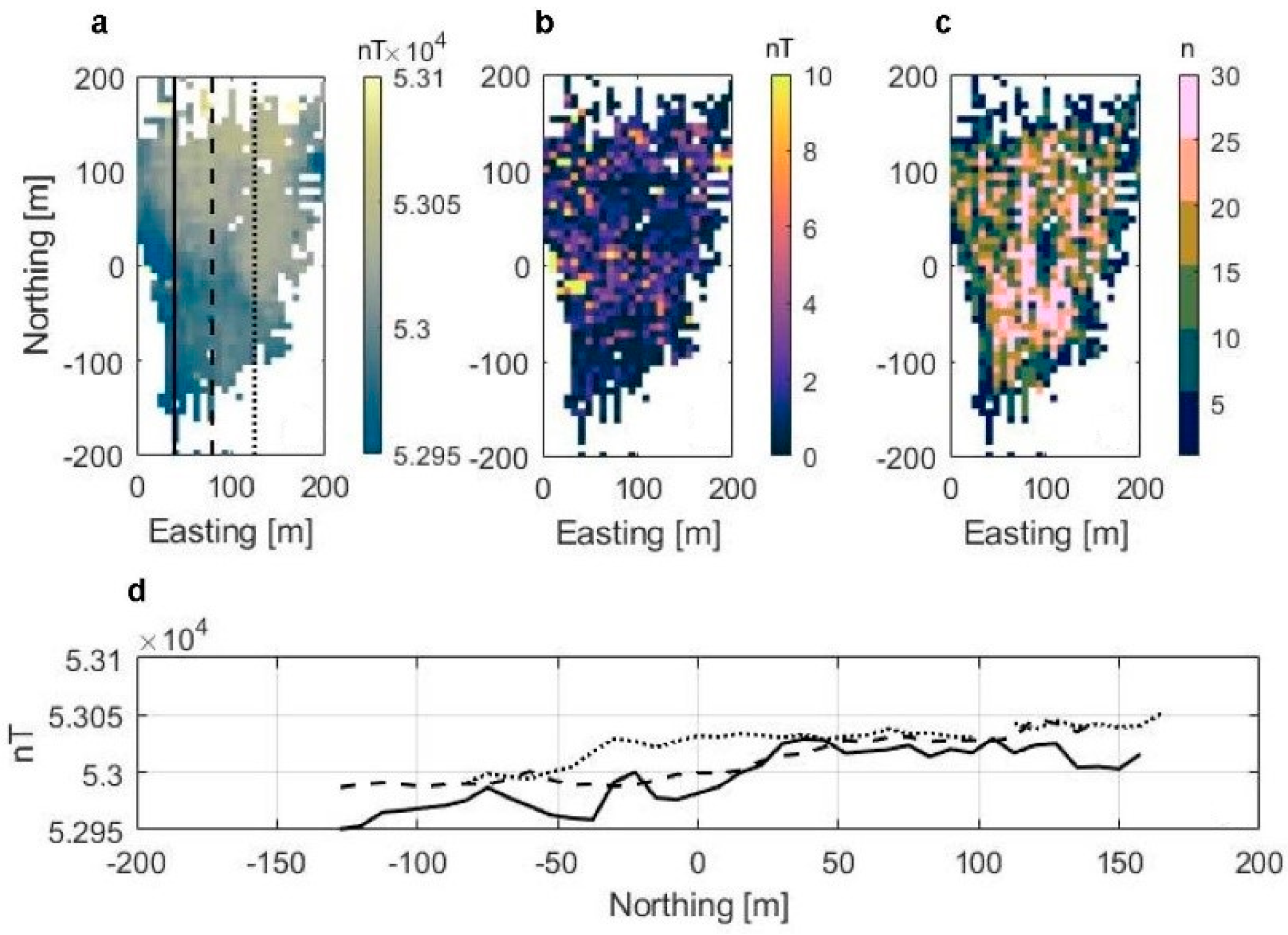
3.2. Background Magnetic Field and Variability
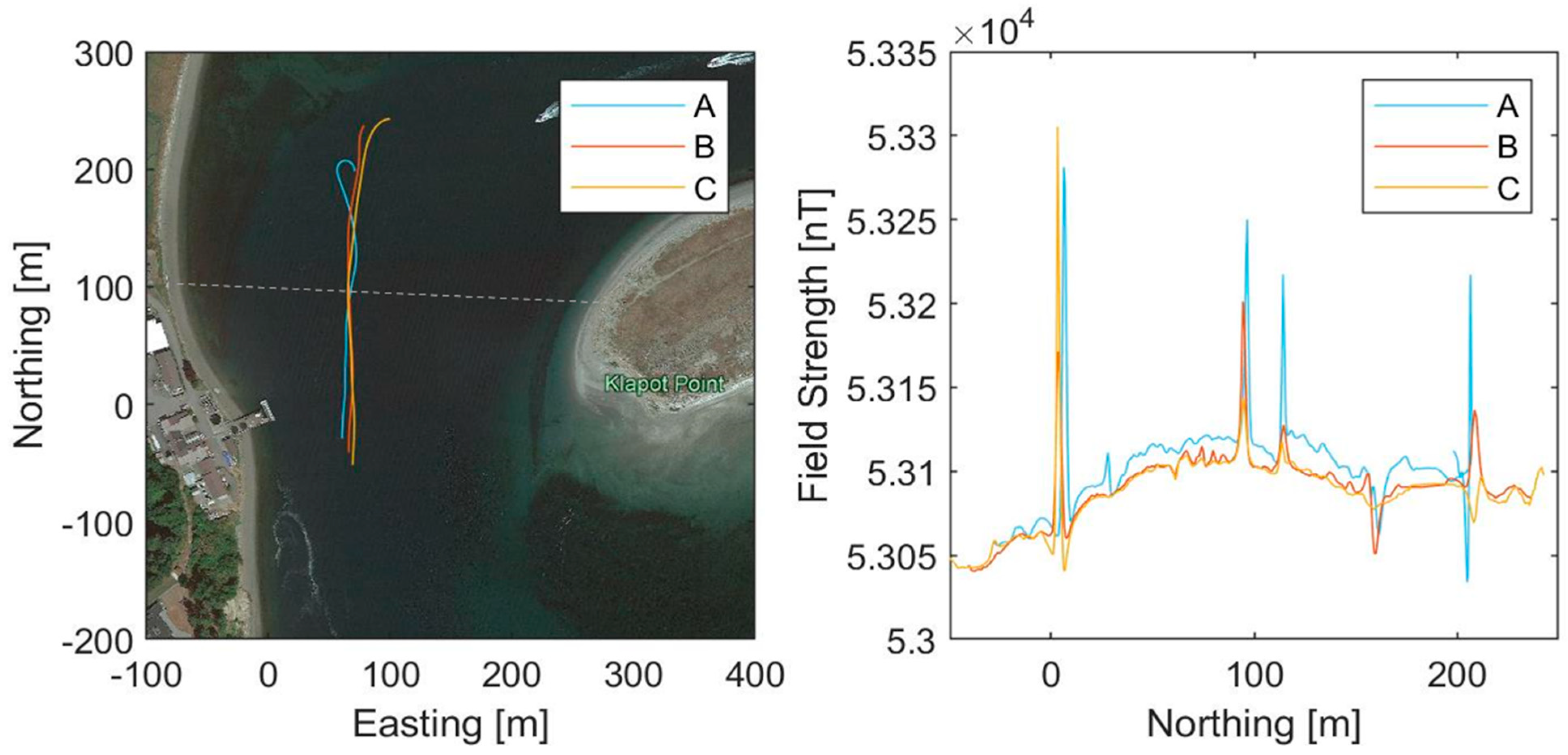
3.3. Background Magnetic Field Compared Day to Day
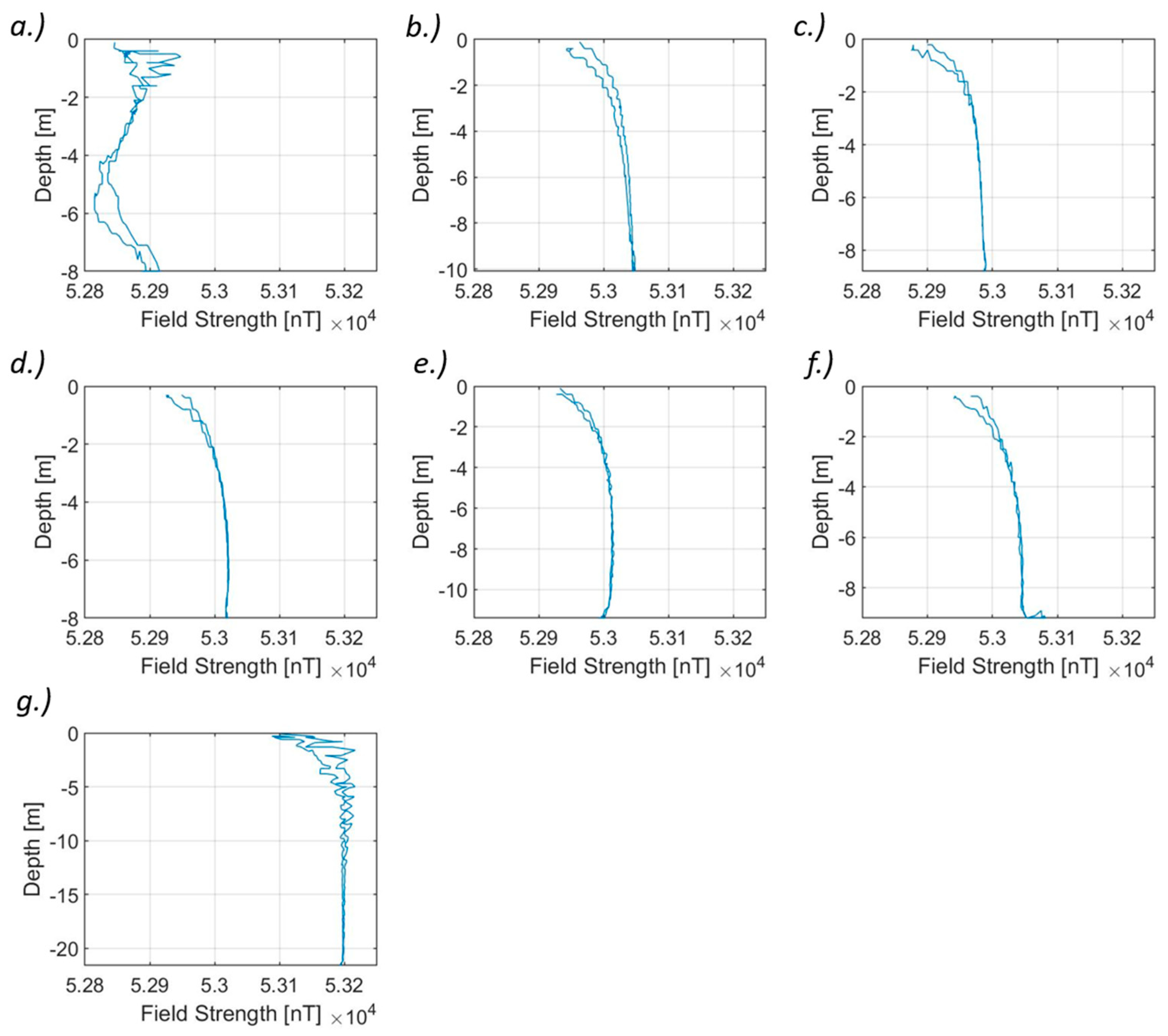
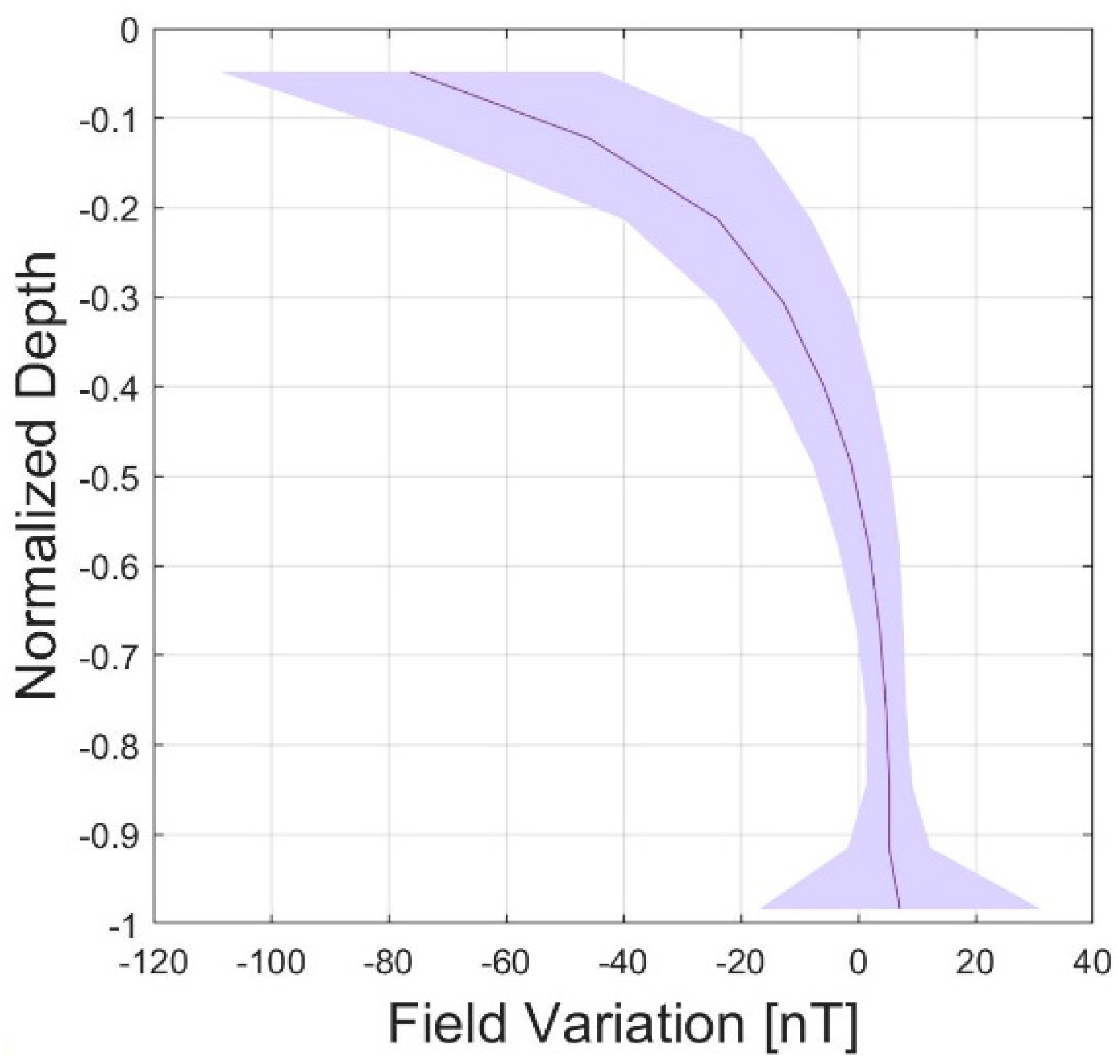
3.4. Depth Profiles
4. Discussion
4.1. Recommendations and Guidelines for Background Magnetic Field Testing
4.2. Observations and Limitations from Background Magnetic Field Testing
4.3. Next Steps in Understanding Magnetic Fields at Marine Energy Sites
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Boehlert, G.W.; Gill, A.B. Environmental and Ecological Effects of Ocean Renewable Energy Development: A Current Synthesis. Oceanography 2010, 23, 68–81. [Google Scholar] [CrossRef] [Green Version]
- Copping, A.E.; Hemery, L.G. OES-Environmental 2020 State of the Science Report; Pacific Northwest National Lab. (PNNL): Richland, WA, USA, 2020.
- Gill, A.B. Offshore Renewable Energy: Ecological Implications of Generating Electricity in the Coastal Zone. J. Appl. Ecol. 2005, 42, 605–615. [Google Scholar] [CrossRef] [Green Version]
- Gill, A.B.; Desender, M. 2020 State of the Science Report, Chapter 5: Risk to Animals from Electromagnetic Fields Emitted by Electric Cables and Marine Renewable Energy Devices; Pacific Northwest National Lab. (PNNL): Richland, WA, USA, 2020.
- Normandeau, E.; Tricas, T.; Gill, A. Effects of EMFs from Undersea Power Cables on Elasmobranchs and Other Marine Species; CA OCS Study BOEMRE; U.S. Department of the Interior Bureau of Ocean Energy Management, Regulation and Enforcement Pacific OCS Region: Camarillo, CA, USA, 2011; p. 9.
- Bonar, P.A.J.; Bryden, I.G.; Borthwick, A.G.L. Social and Ecological Impacts of Marine Energy Development. Renew. Sustain. Energy Rev. 2015, 47, 486–495. [Google Scholar] [CrossRef]
- Hutchison, Z.L.; Gill, A.B.; Sigray, P.; He, H.; King, J.W. A Modelling Evaluation of Electromagnetic Fields Emitted by Buried Subsea Power Cables and Encountered by Marine Animals: Considerations for Marine Renewable Energy Development. Renew. Energy 2021, 177, 72–81. [Google Scholar] [CrossRef]
- Cresci, A.; Allan, B.J.M.; Shema, S.D.; Skiftesvik, A.B.; Browman, H.I. Orientation Behavior and Swimming Speed of Atlantic Herring Larvae (Clupea harengus) in Situ and in Laboratory Exposures to Rotated Artificial Magnetic Fields. J. Exp. Mar. Biol. Ecol. 2020, 526, 151358. [Google Scholar] [CrossRef]
- Putman, N.F.; Lohmann, K.J.; Putman, E.M.; Quinn, T.P.; Klimley, A.P.; Noakes, D.L.G. Evidence for Geomagnetic Imprinting as a Homing Mechanism in Pacific Salmon. Curr. Biol. 2013, 23, 312–316. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Andrulewicz, E.; Napierska, D.; Otremba, Z. The Environmental Effects of the Installation and Functioning of the Submarine SwePol Link HVDC Transmission Line: A Case Study of the Polish Marine Area of the Baltic Sea. J. Sea Res. 2003, 49, 337–345. [Google Scholar] [CrossRef]
- Sherwood, J.; Chidgey, S.; Crockett, P.; Gwyther, D.; Ho, P.; Stewart, S.; Strong, D.; Whitely, B.; Williams, A. Installation and Operational Effects of a HVDC Submarine Cable in a Continental Shelf Setting: Bass Strait, Australia. J. Ocean Eng. Sci. 2016, 1, 337–353. [Google Scholar] [CrossRef] [Green Version]
- Scott, K.; Harsanyi, P.; Easton, B.A.A.; Piper, A.J.R.; Rochas, C.M.V.; Lyndon, A.R. Exposure to Electromagnetic Fields (EMF) from Submarine Power Cables Can Trigger Strength-Dependent Behavioural and Physiological Responses in Edible Crab, Cancer pagurus (L.). J. Mar. Sci. Eng. 2021, 9, 776. [Google Scholar] [CrossRef]
- Taormina, B.; Di Poi, C.; Agnalt, A.-L.; Carlier, A.; Desroy, N.; Escobar-Lux, R.H.; D’eu, J.-F.; Freytet, F.; Durif, C.M.F. Impact of Magnetic Fields Generated by AC/DC Submarine Power Cables on the Behavior of Juvenile European Lobster (Homarus gammarus). Aquat. Toxicol. 2020, 220, 105401. [Google Scholar] [CrossRef] [PubMed]
- Taormina, B.; Bald, J.; Want, A.; Thouzeau, G.; Lejart, M.; Desroy, N.; Carlier, A. A Review of Potential Impacts of Submarine Power Cables on the Marine Environment: Knowledge Gaps, Recommendations and Future Directions. Renew. Sustain. Energy Rev. 2018, 96, 380–391. [Google Scholar] [CrossRef]
- Takagi, S.; Kojima, J.; Asakawa, K. DC Cable Sensors for Locating Underwater Telecommunication Cables. In Proceedings of the OCEANS 96 MTS/IEEE Conference Proceedings. The Coastal Ocean—Prospects for the 21st Century, Fort Lauderdale, FL, USA, 23–26 September 1996; Volume 1, pp. 339–344. [Google Scholar] [CrossRef]
- Szyrowski, T.; Sharma, S.K.; Sutton, R.; Kennedy, G.A. Developments in Subsea Power and Telecommunication Cables Detection: Part 2—Electromagnetic Detection. Underw. Technol. 2013, 31, 133–143. [Google Scholar] [CrossRef]
- Kavet, R.; Wyman, M.T.; Klimley, A.P. Modeling Magnetic Fields from a DC Power Cable Buried Beneath San Francisco Bay Based on Empirical Measurements. PLoS ONE 2016, 11, e0148543. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gill, A.B.; Huang, Y.; Gloyne-Philips, I.; Metcalfe, J.; Quayle, V.; Spencer, J.; Wearmouth, V. COWRIE 2.0 Electromagnetic Fields (EMF) Phase 2: EMF-Sensitive Fish Response to EM Emissions from Sub-Sea Electricity Cables of the Type Used by the Offshore Renewable Energy Industry; Report No. COWRIE-EMF-1-06; Collaborative Offshore Wind Research into the Environment (COWRIE): Cranfield, UK, 2009; p. 68.
- Dhanak, M.; An, E.; Couson, R.; Frankenfield, J.; von Ellenrieder, K.; Venezia, W. Magnetic Field Surveys of Coastal Waters Using an AUV-Towed Magnetometer. In Proceedings of the 2013 OCEANS—San Diego, San Diego, CA, USA, 23–27 September 2013; pp. 1–4. [Google Scholar] [CrossRef]
- Hulot, G.; Finlay, C.C.; Constable, C.G.; Olsen, N.; Mandea, M. The Magnetic Field of Planet Earth. Space Sci. Rev. 2010, 152, 159–222. [Google Scholar] [CrossRef]
- Bankey, V.; Cuevas, A.; Daniels, D.; Finn, C.A.; Hernandez, I.; Hill, P.; Kucks, R.; Miles, W.; Pilkington, M.; Roberts, C.; et al. Digital Data Grids for the Magnetic Anomaly Map of North America; Open-File Report; U.S. Geological Survey: Reston, VA, USA, 2002.
- Ekinci, Y.L. On the Drape and Level Flying Aeromagnetic Survey Modes with Terrain Effects, and Data Reduction between Arbitrary Surfaces. Turk. J. Earth Sci. 2021, 30, 409–424. [Google Scholar] [CrossRef]
- Cavagnaro, R.J.; Thomson, J.; Dillon, T.; Stewart, A.; Wang, T.; Yang, Z. Survey and Numerical Model Analysis for Siting Kilowatt-Scale Tidal Turbines. In Proceedings of the 13th European Wave and Tidal Energy Conference (EWTEC 2019), Napoli, Italy, 31 August–6 September 2019. [Google Scholar]
- Manoj, C.; Kuvshinov, A.; Maus, S.; Lühr, H. Ocean Circulation Generated Magnetic Signals. Earth Planets Space 2006, 58, 429–437. [Google Scholar] [CrossRef] [Green Version]
- Tchernychev, M.; Johnston, J.; Johnson, R.; Tryggestad, J. Total Magnetic Field Signatures over a Submarine HVDC Cable. In Proceedings of the American Geophysical Union, Fall Meeting, San Francisco, CA, USA, 9–13 December 2013. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 23 May 2021 | 24 May 2021 | 25 May 2021 | |
|---|---|---|---|
| 23 May 2021 | 11.7/−10.3 | 13.0/−10.6 | |
| 24 May 2021 | 11.7/10.3 | 6.2/−2.5 | |
| 25 May 2021 | 13.0/10.6 | 6.2/2.5 |
| Cable | |
|---|---|
| Distance (m) | Field Strength (nT) |
| 1 | 250 |
| 5 | 10 |
| 10 | 2.5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Grear, M.E.; McVey, J.R.; Cotter, E.D.; Williams, N.G.; Cavagnaro, R.J. Quantifying Background Magnetic Fields at Marine Energy Sites: Challenges and Recommendations. J. Mar. Sci. Eng. 2022, 10, 687. https://doi.org/10.3390/jmse10050687
Grear ME, McVey JR, Cotter ED, Williams NG, Cavagnaro RJ. Quantifying Background Magnetic Fields at Marine Energy Sites: Challenges and Recommendations. Journal of Marine Science and Engineering. 2022; 10(5):687. https://doi.org/10.3390/jmse10050687
Chicago/Turabian StyleGrear, Molly E., James R. McVey, Emma D. Cotter, Nolann G. Williams, and Robert J. Cavagnaro. 2022. "Quantifying Background Magnetic Fields at Marine Energy Sites: Challenges and Recommendations" Journal of Marine Science and Engineering 10, no. 5: 687. https://doi.org/10.3390/jmse10050687