
Study of the Influence of Nonlinear Moments upon Intensity of Parametric Roll


1
Department of Theory of Ships, Faculty of Shipbuilding and Ocean Engineering, Saint Petersburg State Marine Technical University, Saint Petersburg 190121, Russia
2
Department of Applied Mathematics and Mathematical Modeling, Faculty of Digital Industrial Technologies, Saint Petersburg State Marine Technical University, Saint Petersburg 190121, Russia
*
Author to whom correspondence should be addressed.
J. Mar. Sci. Eng. 2022, 10(8), 1164; https://doi.org/10.3390/jmse10081164
Submission received: 9 July 2022
/
Revised: 16 August 2022
/
Accepted: 19 August 2022
/
Published: 22 August 2022
(This article belongs to the Section Ocean Engineering)
Abstract
:Hydrodynamical analysis of the conditions for the occurrence of chaotic ship roll, leading in some cases to the capsizing of the vessel, showed that such conditions are most likely to occur in the zone of the main parametric resonance of the roll when its period is sequentially doubled, and subharmonic oscillations turn into chaotic ones. This circumstance necessitates special attention to the regime of parametric roll resonance, issues of its occurrence, development, and establishment as well as to the methods of calculation of its amplitudes. In the present paper, the study of the parametric ship roll is conducted on the basis of the Lugovsky formula. An account is taken of the additional nonlinear moments and , obtained through the application of the small parameter method. Presented are the calculation results for the parametric roll of five different ships performing motions at various course angles both with and without account of the aforementioned nonlinear moments. Demonstrated therewith is a significant influence of the nonlinear moments upon the maximum amplitudes of the parametric roll, especially in the case of beam waves.
1. Introduction
Since ancient times, ships have remained a crucial element in all arenas of life and society, and hence the problem of ship capsizing has received considerable attention within the overall effort to avoid catastrophe while out at sea. Initially, this problem was tackled assuming a linear response, and the stability of a ship was analyzed under steady-state assumptions. However, the results from linear analysis only remain true for small amplitude motions and underestimate the critical conditions leading to capsize, which are primarily associated with large-amplitude, complicated nonlinear ship-wave interaction phenomena.
The structure of this paper dedicated to the investigation of the effect of nonlinear moments upon parametric roll contains: an introduction, focusing on the problem under discussion; an extended review of relevant publications including a discussion of the authors’ motivation to carry out this work; mathematical formulation of the finite amplitude equation of a ship rolling in regular waves and its solution by the method of asymptotic expansions; the analysis of the calculated parametric roll amplitudes with due account of nonlinear perturbed moments exemplified for five different ships; and, eventually, a conclusion highlighting main results of the paper and prospects of further studies of the non-linear parametric roll.
The general theory of subharmonic oscillations in nonlinear systems with one degree of freedom was developed in the works by Krylov and Bogolyubov [1], Bogolyubov and Mitropolsky [2], Hayashi [3], Stoker [4], and other authors. The papers by Pavlenko [5], Blagoveshchensky [6], and Basin [7] revealed, both theoretically and experimentally, the regions of amplitude-frequency curves of the main resonance, corresponding to instability in-small, that is, physically unrealizable modes of motion. It should be noted that the in-small type of instability was investigated by Lugovsky.
When studying the behavior of the Mathieu equation, describing nonlinear roll, it was noticed that there exists a certain frequency for which the equation solution is unstable, that is, very large roll amplitudes in this mode become possible even for ships in head waves. The relevant frequencies (presented in terms of the motion period: ) look as follows: , where is eigen period of the roll.
Thus, the waves with a period of 0.5, 1, 1.5, … times eigen period can cause very large roll angles.
Grim [8] was the first to point out this phenomenon, and he also confirmed it experimentally in calm water with the use of weights installed inside the model. Presented in [8] are experimental results of measuring parametric and ultra-harmonic oscillations compared with calculated data.
Kerwin [9] also demonstrated this phenomenon in waves, with subsequent experiments conducted at the N.S.M.B. seaworthiness laboratory, followed by many other confirmations for various models.
The parametric resonance of rolling motions of a small ship in beam waves was considered in the work of Lugovsky [10], which accounted for the finite dimensions of the vessel. Also derived by Lugovsky was a formula allowing the calculation of parametric resonance for a finite ship going at arbitrary heading angles relative to the waves.
It is worth noting that the simplest formula, allowing the calculation of the roll amplitudes in the parametric resonance mode looks as follows
This formula does not account for the nonlinear moments and , and also does not take into account the effect of heaving. Calculations using this formula underestimate the rolling amplitudes several times.
The classical Lugovsky formula takes into account only nonlinear moment and the heaving motions. It looks as follows
and was used to carry out calculations of the maximum amplitudes of the parametric roll and the excitation threshold of the parametric resonance.
In 2008 Lugovsky [11] presented a refined formula, including new correction and a correction for rolling
It is worth mentioning that, so far, no one has investigated the influence of the nonlinearity related with , and even more so with . To carry out such an investigation has become one of the major motivations of the present paper.
Conducted in the towing tank of the Leningrad Shipbuilding Institute was a thorough experimental study of the conditions leading to the occurrence and development of the roll in the parametric resonance mode [11]. It turned out that under the action of regular waves the parametric resonance can be observed in a wide range of variations of the wave steepness, ship draft, and roll damping coefficient if the model loading conditions comply with the main relationships defining the threshold of excitation of the parametric roll. Vilensky [12] used the Ritz-Galerkin method to solve the differential equation and study parametric roll in the following waves. His results indicated that for a ship in the following waves there may develop intensive parametric oscillations with a frequency equal to half of the apparent frequency, and with a frequency equal to the apparent frequency. Therewith, the ship may capsize even in the absence of the wind.
Vilensky [12] and Rakhmanin [13] studied the influence of the initial heel upon the roll of a straight-walled ship in beam waves without forward speed. One of the peculiarities of the roll of the ship with the initial heel is the distinction of the so-called pseudo-static heel from the static heel angle of a ship in calm water. Numerical estimations, carried out by Vilensky showed that the direction of wave motion has a weak influence upon the amplitudes of heaving and rolling in the main resonance mode, but strongly affects the domain of existence and intensity of the parametric roll.
Strelyaev [14] investigated the influence of the vertical position of the center of gravity upon the threshold of parametric roll excitation for a ship in regular beam waves without forward speed. He showed that for the case when the ship center of gravity is located near waterplane () the threshold value significantly increases, so that, practically, the parametric resonance does not manifest itself. An increase of leads to a decrease in the threshold value and the occurrence of intense parametric oscillations.
Shigunov et al. [15] studied the influence of the initial metacentric height and forward speed upon parametric resonance and presented some comparisons with experiments. In this paper, the calculation results were given for two containerships in the cases of regular and irregular waves. In particular, it was shown that in certain cases of loads and speeds, the parametric resonance can become more dangerous in oblique waves as compared to head waves. Two methods and codes were employed including “ROLLS” (roll simulation) by Söding [16] and Kröger [17] and GL SIMBEL (Böttcher [18] and Pereira [19]). In the former, the calculations of lateral-horizontal motions, heaving, pitching, and yawing were conducted separately with the use of linear theory and in the frequency domain whereas surging and rolling were calculated with account of nonlinear effects. The GL SIMBEL method implies considering nonlinear coupled motions for all six degrees of freedom. Krylov forces were found by direct integration across an instantaneous wetted surface, whereas diffraction and radiation forces—with the use of nonlinear two-dimensional theory. The damping coefficients were derived experimentally (see Blume [20]).
Paulling published an interesting paper [21] containing a brief historical review of the methods of investigation of parametric resonance, starting with simple models (Mathieu equation) and involving models accounting for nonlinearities both in damping and restoring moments, influence of initial conditions, metacentric height, and speed of forward motion. Discussed was the APL CHINA incident with on-deck containers which underwent parametric roll resonance. Dallinga [22] proposed a simple one-degree-of-freedom mathematical model, and used it to execute three main steps: (1) study linear motions through calculations in the frequency domain, (2) calculate stability variation with the use of the Dunwoody approach [23] to secure the least possible damping in irregular waves, (3) compare the calculated forces with the experimental data obtained by the method of forced oscillations for estimation of the wave conditions at which there occurs a decrease of the damping moment. The problem formulation in Levadou [24] involved—one degree of freedom, nonlinearity, and time domain solution. Analyzed in this paper were multiple parameters influencing the intensity of the parametric roll, for example, the principal dimensions of the ship, its loading, various configurations of bow and stern, as well as different types of stabilizers (chine keels and active tanks). The results were compared with the experiments conducted in the Seakeeping and Maneuverings Basin (SMB) at MARIN.
Kreuzer and Sichermann, [25] discussed possibilities related to the application of the slender body theory approach to nonlinear ship motions. They underlined that the accurate prediction of large amplitude ship motions in severe seas still represents a major challenge to naval architects. While three-dimensional panel methods have reached the state of maturity in linear seakeeping analysis, the original nonlinear problem, governed by strongly nonlinear boundary conditions, is far from being solved satisfactorily. These nonlinearities are associated with the instantaneous wetted surface of the ship and the non-linearities in the free surface conditions.
Over a period of years, the problem of solving an instantaneous nonlinear boundary value problem has been circumvented by accounting for the Froude–Krylov forces integrated over the actual wetted surface while treating a linear radiation/diffraction problem. The negligence of higher-order hydrodynamic effects has been justified by the different orders of magnitude of the Froude–Krylov and the linear radiation/diffraction forces. However, Huang and Sclavounos [26] demonstrated in a study of heave and pitch motions in steep head seas, that the nonlinear hydrodynamic effects can attain the same order of magnitude as the nonlinear geometric corrections to the Froude–Krylov force.
Another scenario where nonlinear effects become essentially important is the parametric excitation of large amplitude roll motions in the head and following seas. Hashimoto and Umeda, [27] showed that the calculation of the roll restoring moment in waves based on the Froude–Krylov assumption leads to an overestimation of the roll response. The experimental tests confirmed that the reduction of the initial metacentric height for wave lengths comparable to the ship length is overestimated by the Froude–Krylov assumption. Consequently, a consistent investigation of non-linear ship motions must consider both geometric and hydrodynamic nonlinearities. A reasonably plausible treatment of the problem under discussion with the use of an asymptotic approach is provided by the so-called 2D + t theory which was successfully applied to the prediction of high-speed craft wave resistance and deck wetness problems, see Fontaine and Tulin [28]. Such an approach proved to be applicable for the prediction of nonlinear ship motions for slender ship hulls of Wigley type in head seas.
Introduced in [29] is a three-dimensional nonlinear time domain simulation method for solving the problem of a ship undergoing large-amplitude motions. In this method, which was originally developed at Harbin Engineering University, the body boundary condition is satisfied on the instantaneous wetted surface of the moving ship, while the free-surface boundary condition is linearized. The transient free-surface Green function, which includes a Rankine part and a free-surface memory part, is employed to formulate the relevant boundary-value problem, and its numerical solution is accomplished by solving the integral equations for the strength of sources when using a mixed source-dipole distribution on the wetted body surface. According to the authors, the main advantage of their method lies in its capability to investigate large-amplitude motions of bodies with forward speed, relevant to various nonlinear effects of interest to ship’s safety. Some of the preliminary results obtained by this approach, related to the radiation and diffraction problems at zero and non-zero speeds, have been presented and compared with those from the frequency domain code of NTUA and with other published theoretical and experimental results, showing satisfactory agreement.
The paper by Ribeiro e Silva, Turk, and Soares [30] describes the parametric resonance phenomenon focusing on the prediction of the presence or absence of the resonance proper (sensitivity criterion), and also on determination of the ship motion amplitudes. This analysis makes use of the solution of the Mathieu equation and exemplifies the danger of the parametric resonance occurrence. This sufficiently simple method employs the rules of classification societies and helps to secure avoidance or reduction of the parametric resonance at the design stage without time-consuming calculations.
Söding [31] conducted a thorough investigation of the applicability of potential methods for nonlinear floating body simulations with the satisfaction of exact nonlinear boundary conditions on the actual body and fluid boundaries. Although in [31] the method is called a 3-D Rankine source panel method, Professor H. Söding refers to it as Yeung’s method, supposedly first described in Yeung’s PhD dissertation and outlined in [32]. He concludes that the method works well for periodical steep waves without a body but needs improvement if the body is present.
The work of Galeazzi, Blanke, and Poulsen [33] discussed the methods for prediction of the parametric resonance and featured validation of the calculation results through comparison with model and full-size experiments. The authors’ study of the frequency domain showed that the energy of the pitching caused directly by the waves is converted into roll oscillations thus becoming the cause of the resonance. Besides this, the time domain analysis revealed a phase inter-relationship between the first harmonic of the pitching and the second harmonic of the rolling.
Hizir et al. [34] investigated the effect of forward speed on the nonlinear ship motions response. The authors examined the time-domain nonlinear vertical motion response of the S-175 containership advancing in head sea conditions in the large amplitude waves and compared their calculated data with some available experimental results provided in the literature. The boundary value problem was solved by the linear 3D Rankine source panel method with sources distributed on the ship surface, free surface, and control surfaces. Nonlinear fluid forces, which arise from nonlinear restoring and Froude–Krylov forces, were calculated over the instantaneous wetted portion of the ship hull. Radiation forces were kept linear and presented in terms of the impulse response functions using convolution integrals. In the large-amplitude waves, the nonlinear motion responses were identified and presented in terms of transfer functions. The numerical results agree well with the experimental data and show a significant non-linear behavior with the increase in the wave slope. The approach is known as the Translating-Pulsating Source (TPS) method. This method provides a more accurate formulation in handling the forward speed effects and delivers a better agreement with the experimental data compared to the known Pulsating Source (PS) method.
Acomi et al. [35] developed a computational software for the prediction of the parametric resonance depending on the ship loading, wave characteristics, heading angle, and speed. According to the authors, the use of the Octopus software package (Octopus Office 6, AMARCON BV (2010), The Netherlands) allows to determine the resonance parameters with sufficient accuracy and to devise the safest possible navigation route with an account of the surrounding waves.
2. Description of the Calculation Method for Parametric Ship Roll
The finite-amplitude equation of ship rolling in regular waves has the form [11]:
where:
- —roll angle;
- —in the general case, is a function of the roll angular velocity, defined theoretically by means of the analysis of the dependence of on the ship roll parameters or, experimentally, based on the results of the model tests;
- —apparent circular wave frequency related to the actual circular wave frequency by the equation: , >– form frequency (wave number);
- —course angle;
- —absolute magnitude of the speed of rectilinear translational ship motion;
- —maximum angle of wave slope;
—shoulder of static stability of a straight-walled ship;
—ship weight displacement;
—moment of inertia of the waterplane area relative to the central longitudinal axis;
—small metacentric radius;
—waterplane area coefficient;
nondimensional characteristics of the diffraction part of the exciting moment, defined in accordance with [10]. Let the oscillations of the dynamic system be described by a differential equation of the form:
—frequency of small eigen oscillations of the system;
—circular frequency of the external excitation;
—nonlinear function of displacement and speed mainly dependent on time with respect to which it is periodic with the period 2π, i.e.,
the nonlinearity of this function in terms of and being polynomial;
—some small parameter of the problem emphasizing quasi-linearity of the equation under consideration.
Small parameter may have no physical sense, although, in this problem, which combines hydrodynamics and kinematics of nonlinear ship motions, it is expedient to assign to this parameter the meaning of non-dimensional amplitude of the main harmonic of the roll. The latter definition enables the harmonization of the solution of the associated differential equation with the accuracy of the composition of this equation which, in its turn depends, on how accurately are determined the forces acting on the ship. In order to cover all resonance phenomena, the solution of the equation should be sought in the form
Therewith define the amplitude and initial phase through a system:
where and are unknown functions also subject to determination.
Substituting (11) into (9), employing system (12), and solving the system of linear differential equations for in accordance with derivations of the monograph [1] one can find in the first approximation (with accuracy of the order of ):
where the limits of variation of are defined by the equality , .
In the second approximation (to the accuracy of the order of ):
General analysis of the original differential equation of the finite-amplitude oscillations, carried out in [2], demonstrated that, besides the main regime, there can also exist in the given dynamic system the subharmonic resonance modes of roll, whose frequencies are integer numbers of times less than the excitation frequency.
To obtain dependencies, characterizing the parametric resonance mode, put in the general Formula (13) and .
Then, in the first approximation , where the amplitude and phase are determined by a system of the equations describing the oscillation settling near (in frequency) the main subharmonic resonance mode:
Here
These functions are readily calculated for a given stability diagram and a law of resistance to roll.
Integrating the system (16) by one of the computational methods, we can investigate an unsteady ship roll in the domain of the main subharmonic resonance, and estimate its stability with respect to external perturbations. Equating to zero the right-hand-side parts of the roll settling equations, excluding the phase of the oscillations and solving the resulting equality with respect to , we find the steady-state relationship between the roll amplitude and the apparent frequency of the waves:
Using this formula, we can determine , corresponding to given , and plot the amplitude-frequency curve of parametric roll, the latter necessitating the use of the method of the successive approximation. If in the right-hand side of the Equation (18) we take as an initial approximation , then, as a rule, the next approximation would be quite sufficient for practical calculation.
When using the Formula (18) practically, one ought to take into account that in the case of the quadratic law of damping
and in the case of linear case of damping
where and —are relative coefficients of roll damping determined through calculation or experimentally.
Augmenting the accuracy of the expansions with respect to small parameters in the hydrodynamic problem of finite amplitude rolling allows to carry out a correction of the Formula (18). Thus, Lugovsky derived a new nonlinear addition to an exciting moment for the case of a straight-walled ship with hull lines approximated by parabolas [10]:
whereas block coefficients and are defined by the formulas:
Moreover, accounting for the correction of the influence of heaving upon restoring moment would also change, and, with accuracy up to the order of inclusive, there appears, besides the usual linear term proportional to , a nonlinear addition, proportional to . Eventually, a part of the water pressure moment force, causing parametric resonance, with accuracy up to inclusive, can be written down as follows
Here —is heaving amplitude.
To estimate the influence of nonlinear terms in the general case of finite ship, advancing at an arbitrary course angle with respect to the direction of wave motion, one ought to calculate in accordance with (21) for different characteristics of the ship hull and loads at various course angles within the zone of apparent frequencies , close to doubled eigen frequency , calculated with an account of the nonlinearity of the stability diagram.
With an account of the new nonlinear moment the Formula (18) takes the form:
Here also, as in the expression (18), the moment and the coefficient are calculated with help of the following formulas:
Determination of the amplitude of heaving, entering the expression (26), is carried out on the basis of the solutions of the system of the equations of heaving and pitching:
3. Analysis of Calculated Results
Based on the above-stated method there were carried out calculations for five types of ships: a passenger vessel, tanker, containership, timber carrier, and a bulker. Characteristics of these ships are presented in Table 1.
- For the above-listed ships, there were conducted calculations of amplitude-frequency characteristics of the parametric resonance accounting: for both nonlinear moments and , with an account of just , with an account of just , and not including these moments. The calculations were executed for a given static stability diagram whereas the frequency curves were constructed with the Vlasov method, see [10];
- Used in the calculations was the quadratic law of damping. The quadratic resistance coefficient was determined on the basis of Avdeev–Anfimov formula [10].
The calculations were performed for different course angles. Typical results are presented in Figure 1, Figure 2, Figure 3, Figure 4, Figure 5, Figure 6, Figure 7 and Figure 8.
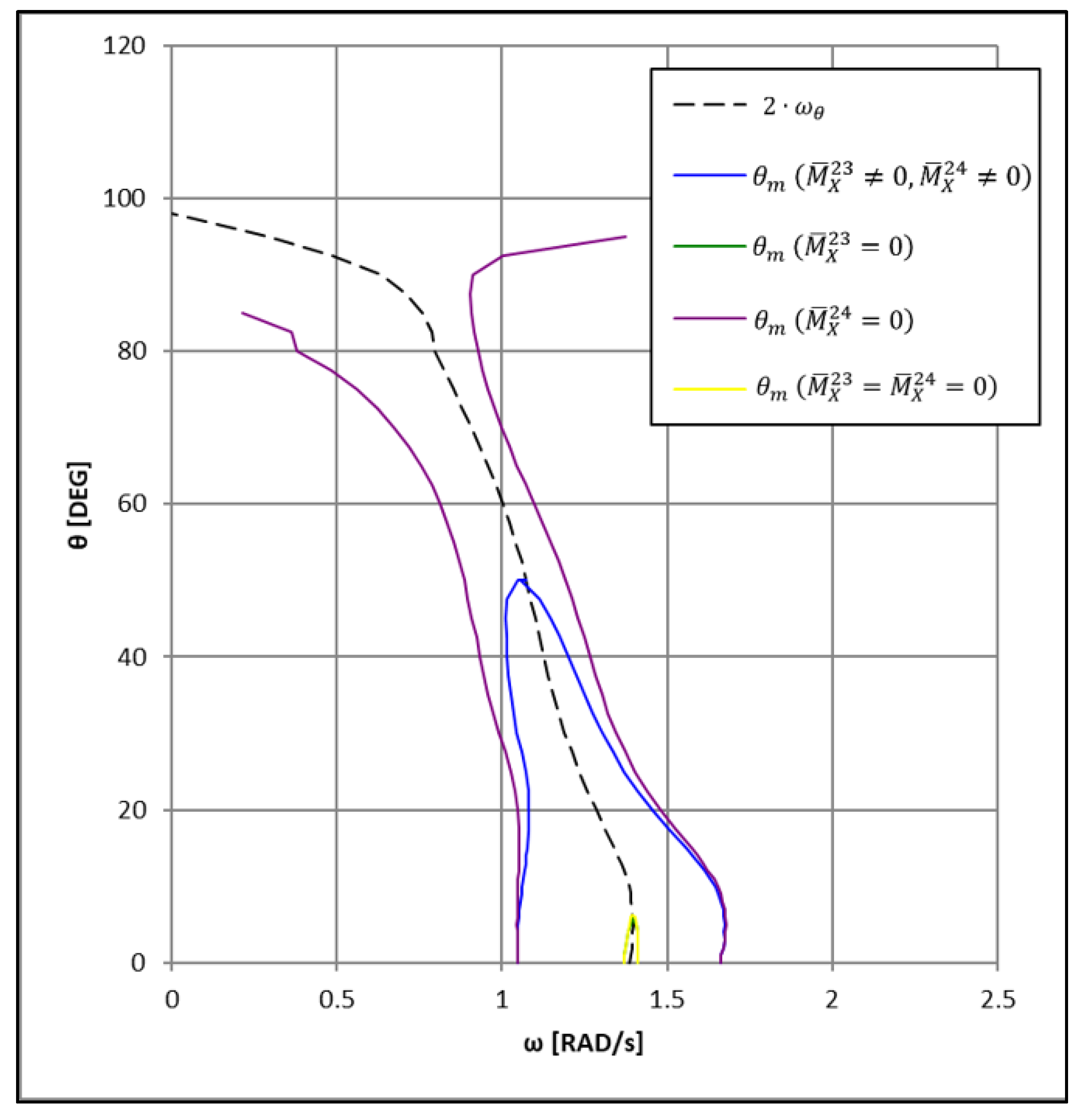
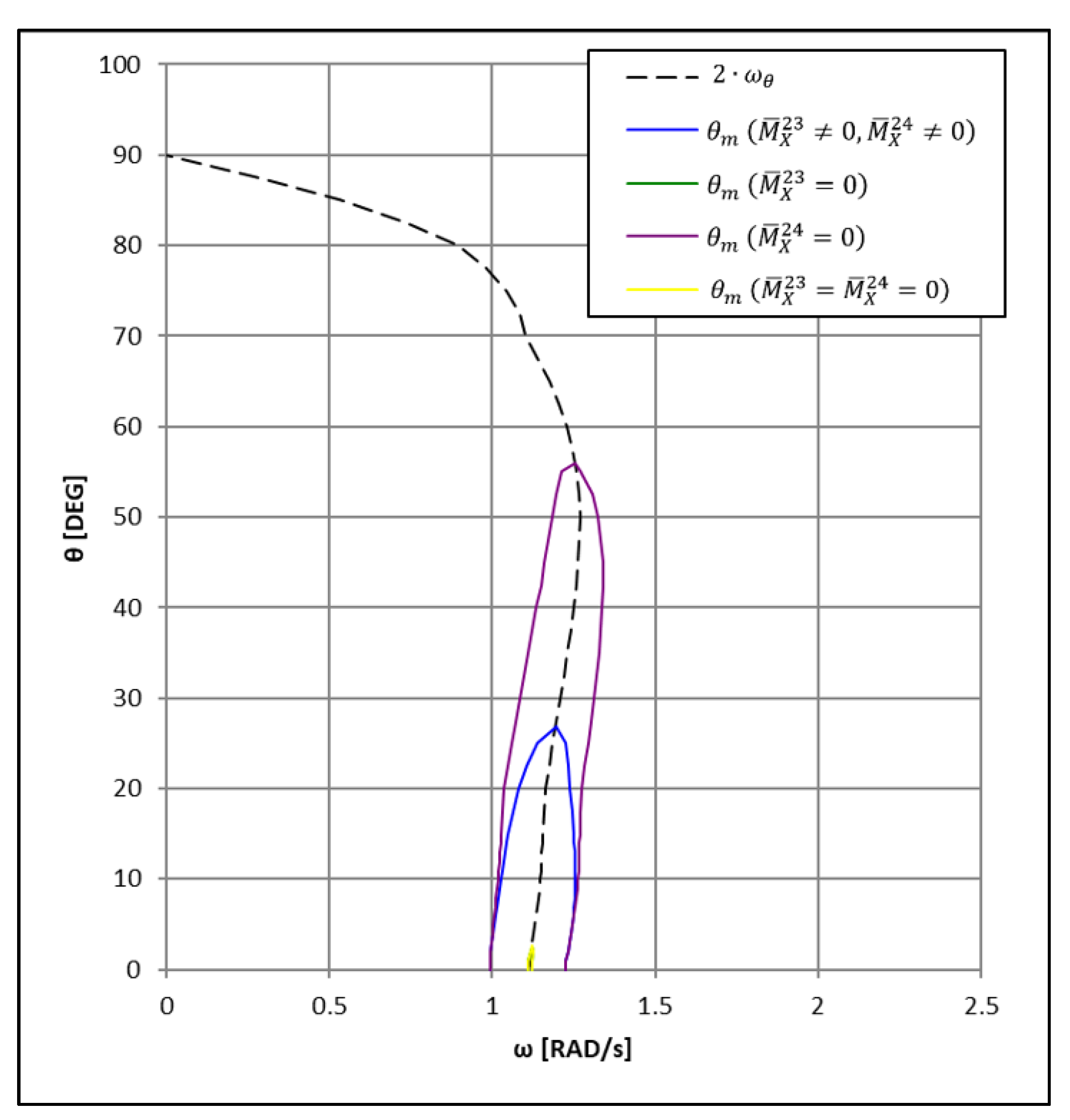
The analysis of the calculated results showed that the parametric roll occurs for all five ships at different course angles from 60 to 120 degrees. Therewith the maximum amplitudes take place at the beam-to-waves position of the ship. Thus, for the tanker “Baskunchak” at the beam-to-waves position, the maximum amplitude of parametric roll with an account of both moments constitutes 50 degrees (Figure 1), and at oblique angles, this amplitude constitutes 22 degrees (Figure 2).
The influence of a nonlinear moment also manifests itself most for the beam-to-wave position of the ship. Accounting for this moment component in the expression (6) results in some cases in a significant decrease of the parametric roll amplitude. For example, for the containership “Khudozhnik Saryan” there was observed a two-fold decrease in the amplitudes (see Figure 7). Without an account of the nonlinear moment the maximum roll amplitude constitutes 55 degrees whereas with an account of this moment the maximum roll amplitude constitutes 27 degrees (see Figure 7). Similarly, the two-fold decrease of the parametric roll amplitudes is observed for the passenger ship “Lyubov Orlova” (see Figure 6). The amplitude-frequency characteristics of the parametric roll of the tanker “Baskunchak” and bulker “Kapitan Panfilov” without account of the nonlinear moment do not have any maximum, which can be explained by a low value of the damping coefficient. At oblique following waves angle of 60 degrees, the maximum amplitude of the parametric roll of the tanker “Baskunchak” without account of constitutes 5 degrees, and with an account of this moment constitutes 38 degrees (Figure 2).
Analysis of the calculated results also showed that the influence of the nonlinear moment is observed only upon the amplitudes of the parametric roll. This moment does not affect the zone of action of the parametric resonance which remains the same as that without account of the nonlinear moment. (Figure 1, Figure 2, Figure 3, Figure 4, Figure 5, Figure 6, Figure 7 and Figure 8). Therewith, the widest zones of action exist for all considered ships even in head waves.
Analysis of the calculations with an account of both nonlinear moments as well as calculations performed without account of showed that not accounting for these moments leads to an abrupt decrease in the calculated amplitudes of the parametric roll. In most cases, these amplitudes become less than 10 degrees (Figure 1, Figure 2, Figure 4, Figure 7 and Figure 8).
Also abruptly narrows the action zone of parametric resonance, practically reducing it to a frequency curve. In some cases, not accounting for the moment results in degeneracy of the solution (Figure 6 and Figure 8).
Thus, only simultaneous accounting for both nonlinear moments secures the sustainability of the obtained results.
4. Conclusions
For the first time, a study has been conducted on the joint influence of the moments and upon the amplitudes of the parametric roll.
The calculations carried out in this paper revealed a considerable influence of both nonlinear moments upon the amplitudes of the parametric roll. This influence manifests itself for all ship types and, most significantly, for the case of the ship in beam waves.
Numerical estimations also show that the effect of the proposed nonlinear additions to the perturbed moment of the main parametric resonance is all the more noticeable the greater the role of the ship orbital motion compared to its heaving, and the closer the center of gravity to the equilibrium waterline. For the course angles close to 90 degrees, this increase can be in the range of 20–30%. However, the proposed formulas for the nonlinear moments do not account for the frame flare in the surface part of the hull as well as for the deck edge entrance into the water. Thus, further elaboration of the formulas for nonlinear moments and , affecting parametric resonance, which can be associated with the frame flare.
Further on the authors would continue their study of parametric resonance, in particular for the case of pure parametric excitation of the roll induced by coupled heaving-pitching oscillations for various hull configurations and types of nonlinearities.
Author Contributions
Conceptualization, methodology and formal analysis, V.S; validation, D.A.; writing original draft preparation, V.S. and D.A.; writing review and editing V.S., K.R., D.A. and Z.M.H.; funding acquisition, K.R. All authors have read and agreed to the published version of the manuscript.
Funding
This research is partially funded by the Ministry of Science and Higher Education of the Russian Federation as part of World-Class Research Center Program: Advanced Digital Technologies (contract No. 075-15-2020-903 dated 16 November 2020).
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Bogolyubov, N.N.; Krylov, N.M. Introduction into Nonlinear Mechanics; Publishing House of the Academy of Sciences of the Ukrainian Soviet Socialist Republic: Kyiv, Ukraine, 1937. (In Russian) [Google Scholar]
- Bogolyubov, N.N.; Mitropolsky, Y.A. Asymptotic Methods in the Theory of Nonlinear Oscillations; Fizmatgiz: Moscow, Russia, 1975. (In Russian) [Google Scholar]
- Hayashi, T. Nonlinear Oscillations in Electrical Systems; MIR Publishers: Moscow, Russia, 1968. [Google Scholar]
- Stocker, J.J. Waves on Water; Foreign Literature Publishing House: Moscow, Russia, 1959. [Google Scholar]
- Pavlenko, G.E. Ship Motions; Gostransizdat: Moscow, Russia, 1935. (In Russian) [Google Scholar]
- Blagoveshchensky, S.N. Ship Motions; Sudpromgiz: Leningrad, Russia, 1954. (In Russian) [Google Scholar]
- Basin, A.M. Ship Motions; Transport: Leningrad, Russia, 1969. (In Russian) [Google Scholar]
- Grim, O. Rollschwingungen, Stabilität und Sicherheit im Seegang; Schiffstechnik: Hamburg, Germany, 1952. [Google Scholar]
- Kerwin, J.E. Notes on rolling in longitudinal waves. Int. Shipbuild. Progress. 1955, 2, 597. [Google Scholar] [CrossRef]
- Lugovsky, V.V. Nonlinear Problems of Seakeeping of Ship; Sudostroenie: Leningrad, Russia, 1966. (In Russian) [Google Scholar]
- Lugovsky, V.V. Some Issues of Nonlinear Theory of Ship Motions Associated with Provision of Ship Stability in Waves; SMTU: St. Petersburg, Russia, 2008; pp. 93–114. (In Russian) [Google Scholar]
- Vilensky, G.V. Rolling of a Ship with Initial Heel Angle in the Parametric Resonance Mode; Science & Technology Publication of the Register of the USSR: Leningrad, Russia, 1976. (In Russian) [Google Scholar]
- Rakhmanin, N.N. Roll and Stability of a Ship with Heel in Free-Drifting Mode in Waves; Science & Technology Proceedings; Krylov State Research Center: Leningrad, Russia, 1991. [Google Scholar]
- Strelyaev, L.N. On the Conditions of Occurrence of Ship Roll in Relatively Short Waves; Central Research Institute of Marine Fleet: Helsinki, Finland, 1966. (In Russian) [Google Scholar]
- Shigunov, V.; Moctar, O.E.; Rathje, H. Conditions of parametric rolling. In Proceedings of the 10th International Conference on Stability of Ships and Ocean Vehicles, St Petersburg, Russia, 22–26 June 2009. (In Russian). [Google Scholar]
- Söding, H. Leckstabilität im Seegang Rep. 429; Institut für Schiffbau: Hamburg, Germany, 1982. [Google Scholar]
- Kröger, P. Roll Simulation von Schiffen im Seegang. Schiffstechnik 1987, 33, 187–216. [Google Scholar]
- Böttcher, H. Ship Motion Simulation in a Seaway Using Detailed Hydrodynamic Force Coefficients. Proc. STAB’86 1986, 1. Available online: https://tore.tuhh.de/bitstream/11420/916/1/Bericht_Nr.498_H.Bttcher_Simulation_of_Ship_Motions_in_a_Seaway.pdf (accessed on 1 July 2022).
- Pereira, R. Simulation Nichtlinearer Seegangslasten. Schiffstechnik 1988, 35, 173–193. [Google Scholar]
- Blume, P. Experimentelle Bestimmung von Koeffizienten der wirksamen Rolldämpfung und ihre Anwendung zur Abschätzung extremer Rollwinkel. Schiffstechnik 1979, 25, 3–29. [Google Scholar]
- Paulling, J.R. Parametric Rolling of Ships–then and now. In Contemporary Ideas on Ship Stability and Capsizing in Waves; Springer: Dordrecht, The Netherlands, 2011; pp. 347–360. [Google Scholar]
- Dallinga, R.P. Predicting Parametric Roll. SWZ|Marit. 2014, 135, 44–47. [Google Scholar]
- Dunwoody, A.B. Roll of a Ship in Astern Seas—Metacentric Height Spectra. J. Ship Res. 1989, 33, 221–228. [Google Scholar] [CrossRef]
- Levadou, M.; Veer, R.V.T. Parametric Roll and Ship Design. In Contemporary Ideas on Ship Stability and Capsizing in Waves; Springer: Dordrecht, The Netherlands, 2011; pp. 307–330. [Google Scholar]
- Kreuzer, E.J.; Sichermann, W.M. Slender Body Theory Approach to Nonlinear Ship Motions. In Proceedings of the 20th IWWWFB Conference, Spitsbergen, Norway, 19 May–1 June 2005. [Google Scholar]
- Huang, Y.; Sclavounos, P.D. Nonlinear ship motions. J. Ship Res. 1998, 42, 120–130. [Google Scholar] [CrossRef]
- Hashimoto, H.; Umeda, N. Nonlinear analysis of parametric rolling in longitudinal and quartering seas with realistic modeling of the roll–restoring moment. J. Mar. Sci. Technol. 2004, 9, 117–126. [Google Scholar] [CrossRef]
- Fontaine, E.; Tulin, M.P. On the prediction of nonlinear free-surface flows past slender hulls using 2d+t theory: The evolution of an idea. Ship Technol. Res. 2001, 48, 56–67. [Google Scholar]
- Papanikolau, A.; Liu, S.; Duan, W. A Time Domain Numerical Simulation Method for Nonlinear Ship Motions. J. Harbin Eng. Univ. 2006, 27, 177–185. [Google Scholar]
- Ribeiro e Silva, S.; Turk, A.; Soares, C.G. On the parametric rolling of container vessels. In Brodogradnja: Teorija i Praksa Brodogradnje i Pomorskol. 2e Tehnike; HRCAK: Zagreb, Croatia, 2010; pp. 347–358. [Google Scholar]
- Söding, H. Towards Fully-Nonlinear Floating Body Simulations by a Potential Method. In Proceedings of the ASME 2012 31st International Conference on Ocean, Offshore and Arctic Engineering, OMAE2012, OMAE2012-83554, Rio de Janeiro, Brazil, 1–6 July 2012; p. 11. [Google Scholar]
- Bai, K.J.; Yeung, R.W. Numerical solutions to free-surface flow problems. In Proceedings of the 10th Symposium on Naval Hydrodynamics, Cambridge, MA, USA, 24–28 June 1974; pp. 609–647. [Google Scholar]
- Galeazzi, R.; Blanke, M.; Poulsen, N.K. Detection of Parametric Roll for Ships. In Parametric Resonance in Dynamical Systems; Springer: New York, NY, USA, 2012; pp. 17–43. [Google Scholar]
- Hizir, O.G.; Yuan, Z.; Incecik, A.; Turan, O. The effect of forward speed on nonlinear ship motion responses. In Proceedings of the 18th International Conference on Ships and Shipping Research, Lecco, Italy, 24–26 June 2015; pp. 1–10. [Google Scholar]
- Acomi, N.; Cristian, A.; Cristian, A.; Alina, B.; Aurel, B. Avoiding the parametric roll. In Advanced Topics in Optoelectronics, Microelectronics, and Nanotechnologies, VIII; SPIE: Bellingham, WA, USA, 2016; Volume 10010, p. 100102M. [Google Scholar]
Figure 1.
Parametric roll of tanker “Baskunchak”,.

Figure 2.
Parametric roll of tanker “Baskunchak”, .

Figure 3.
Parametric roll of bulker “Kapitan Panfilov”,.

Figure 4.
Parametric roll of bulker “Kapitan Panfilov”,.

Figure 5.
Parametric roll of passenger vessel “Lyubov Orlova”,.

Figure 6.
Parametric roll of passenger vessel “Lyubov Orlova”,.

Figure 7.
Parametric roll of container ship “Khudozhnik Saryan”,.

Figure 8.
Parametric roll of timber ship “Nikolay Novikov”,.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Characteristics of ships.
| Ship | L, m | B, m | T, m | H, m | δ | zc, m | r, m | h0, m |
|---|---|---|---|---|---|---|---|---|
| Passenger vessel “Lyubov Orlova” | 90 | 16.2 | 4.65 | 7 | 0.598 | 2.54 | 4.365 | 1.18 |
| Tanker “Baskunchak” | 74 | 12 | 4.65 | 7.6 | 0.646 | 2.529 | 2.65 | 1 |
| Container ship “Khudozhnik Saryan” | 157.2 | 25.4 | 9.22 | 16.8 | 0.56 | 5.074 | 5.6 | 2.74 |
| Bulker “Kapitan Panfilov” | 134 | 20.6 | 9.4 | 13.5 | 0.78 | 4.94 | 3.94 | 1.45 |
| Timber ship “Nikolay Novikov” | 140 | 21 | 8.68 | 11.57 | 0.74 | 4.55 | 4.13 | 2.31 |
Here: L—length of a ship; B—breadth, T—draught; H—height of the ship; δ—block coefficient; r—metacentric radius; h0—metacentric height.
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Semenova, V.; Rozhdestvensky, K.; Albaev, D.; Htet, Z.M. Study of the Influence of Nonlinear Moments upon Intensity of Parametric Roll. J. Mar. Sci. Eng. 2022, 10, 1164. https://doi.org/10.3390/jmse10081164
AMA Style
Semenova V, Rozhdestvensky K, Albaev D, Htet ZM. Study of the Influence of Nonlinear Moments upon Intensity of Parametric Roll. Journal of Marine Science and Engineering. 2022; 10(8):1164. https://doi.org/10.3390/jmse10081164
Chicago/Turabian StyleSemenova, Victoria, Kirill Rozhdestvensky, Danil Albaev, and Zin Min Htet. 2022. "Study of the Influence of Nonlinear Moments upon Intensity of Parametric Roll" Journal of Marine Science and Engineering 10, no. 8: 1164. https://doi.org/10.3390/jmse10081164
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.