
Initial-Condition Effects on a Two-Memristor-Based Jerk System


School of Microelectronics and Control Engineering, Changzhou University, Changzhou 213164, China
*
Author to whom correspondence should be addressed.
Mathematics 2022, 10(3), 411; https://doi.org/10.3390/math10030411
Submission received: 5 January 2022
/
Revised: 23 January 2022
/
Accepted: 26 January 2022
/
Published: 27 January 2022
Abstract
:Memristor-based systems can exhibit the phenomenon of extreme multi-stability, which results in the coexistence of infinitely many attractors. However, most of the recently published literature focuses on the extreme multi-stability related to memristor initial conditions rather than non-memristor initial conditions. In this paper, we present a new five-dimensional (5-D) two-memristor-based jerk (TMJ) system and study complex dynamical effects induced by memristor and non-memristor initial conditions therein. Using multiple numerical methods, coupling-coefficient-reliant dynamical behaviors under different memristor initial conditions are disclosed, and the dynamical effects of the memristor initial conditions under different non-memristor initial conditions are revealed. The numerical results show that the dynamical behaviors of the 5-D TMJ system are not only dependent on the coupling coefficients, but also dependent on the memristor and non-memristor initial conditions. In addition, with the analog and digital implementations of the 5-D TMJ system, PSIM circuit simulations and microcontroller-based hardware experiments validate the numerical results.
1. Introduction
In general, a nonlinear dynamical system can exhibit chaotic dynamics for specific system parameters and initial conditions [1,2]. To generate chaotic attractors, various nonlinear oscillation circuits and dynamical systems have been proposed successively and studied comprehensively [3,4,5,6,7]. These nonlinear circuits and systems mainly include fractional-order Logistic map [8], no-equilibrium hyperchaotic multi-wing system [9], high-dimensional chaotic and hyper-chaotic systems [10,11], memristive Rulkov neuron model [12], memristor-based hyperchaotic maps [13], hidden and self-excited Lorenz-like system [14], memristive hyperchaotic autonomous system [15], asymmetric electrical synapse-coupled neurons model [16], memcapacitive oscillator [17], hybrid diode-based jerk circuit [18], two-memristor-based Chua’s circuit [19], and so on. For normal cases, the nonlinear circuits and systems have several determined equilibrium points and their attractors are self-excited from unstable equilibrium points [20]. However, when having time-varying equilibrium [21,22,23] or line/plane equilibrium [19,24,25,26,27], the nonlinear circuits and systems demonstrated the coexisting behaviors of infinitely many attractors, resulting in the emergence of special extreme multi-stability.
In recent years, memristor-based chaotic circuits and systems have been broadly investigated, since memristor is a special nonlinear circuit component with memory effect and synaptic plasticity [19,28,29]. This particular type of chaotic circuit and system is conductive to deriving coexisting infinitely many attractors. Such coexistence of infinitely many attractors means initial-condition-related extreme multi-stability [30,31,32]. To implement the initial-condition-related extreme multi-stability, an effective and simple method is to introduce memristor into an existing dynamical system to construct a new memristor-based dynamical system, which is different from the method of using periodic trigonometric function to realize the initial condition-boosted infinitely many attractors in some special boostable systems [33,34]. In fact, the memristor-based dynamical system has a total bifurcation route to chaos with the evolution of the initial conditions [19] and can display the coexistence of various types of attractors [27]. However, most of the recently published literature only focuses on the extreme multi-stability related to the initial conditions of memristors [35,36,37,38], and little on the extreme multi-stability related to the initial conditions of non-memristors. In this paper, we present a new 5-D TMJ system and emphatically study complex dynamical effects induced by the initial conditions of memristors and non-memristors therein. Thus, the dynamical effects of the initial conditions on the 5-D TMJ system are disclosed comprehensively, which have not been wholly reported in the previously published literature.
The rest of this paper is arranged as follows. Section 2 first presents a 5-D TMJ system and then studies complex dynamics related to the coupling coefficients. Section 3 focuses on the dynamical effects of memristor and non-memristor initial conditions on the TMJ system. With the analog and digital implementations, PSIM circuit simulations and experimental measurements are carried out to validate the numerical simulations in Section 4. Finally, the paper is summarized in Section 5.
2. The TMJ System with Complex Dynamics
This section first presents a new 5-D TMJ system and then studies complex dynamics related to the coupling coefficients using multiple numerical methods.
2.1. Mathematical Modeling
A jerk system is a third-order ordinary differential equation. It is of the following form:
J(·) is a nonlinear function. Since the mathematical model in (1) represents the cubic time derivative of variable x, it is named the ‘jerk’.
A simple jerk system used in this paper is improved from [39] and its general jerk form can be described as follows:
where a and b are two positive control parameters.
Denote x = x1, ẋ = x2, and ẍ = ax3, respectively. The simple jerk system in (2) can be rewritten as:
where x1, x2, and x3 are three state variables. Therefore, the simple jerk system is a three-dimensional nonlinear dynamical system.
The simple jerk system in (3) only has a cubic polynomial nonlinearity of state variable x1. On this basis, and referring to [35], a new 5-D TMJ system is presented in this paper, which is achieved by replacing the cubic polynomial in brackets with one memristor and introducing another memristor into the first equation.
For an input x and an output y, a flux-controlled memristor with state variable φ can be described as:
The memductance W(φ) in (4) is selected as a threshold nonlinear function bounded above and below, which can be expressed by:
Thus, the 5-D TMJ system is established using the above two memristors as:
where x4 and x5 represent the inner state variables of two memristors, and k1 and k2 represent two changeable coupling coefficients. Therefore, the system modeled by (6) is a 5-D nonlinear dynamical system. Besides, the initial conditions are defined as ICs = (x1(0), x2(0), x3(0), x4(0), x5(0)), in which the first three initial conditions IC1 = (x1(0), x2(0), x3(0)) are called the non-memristor initial conditions and the last two initial conditions IC2 = (x4(0), x5(0)) are called the memristor initial conditions.
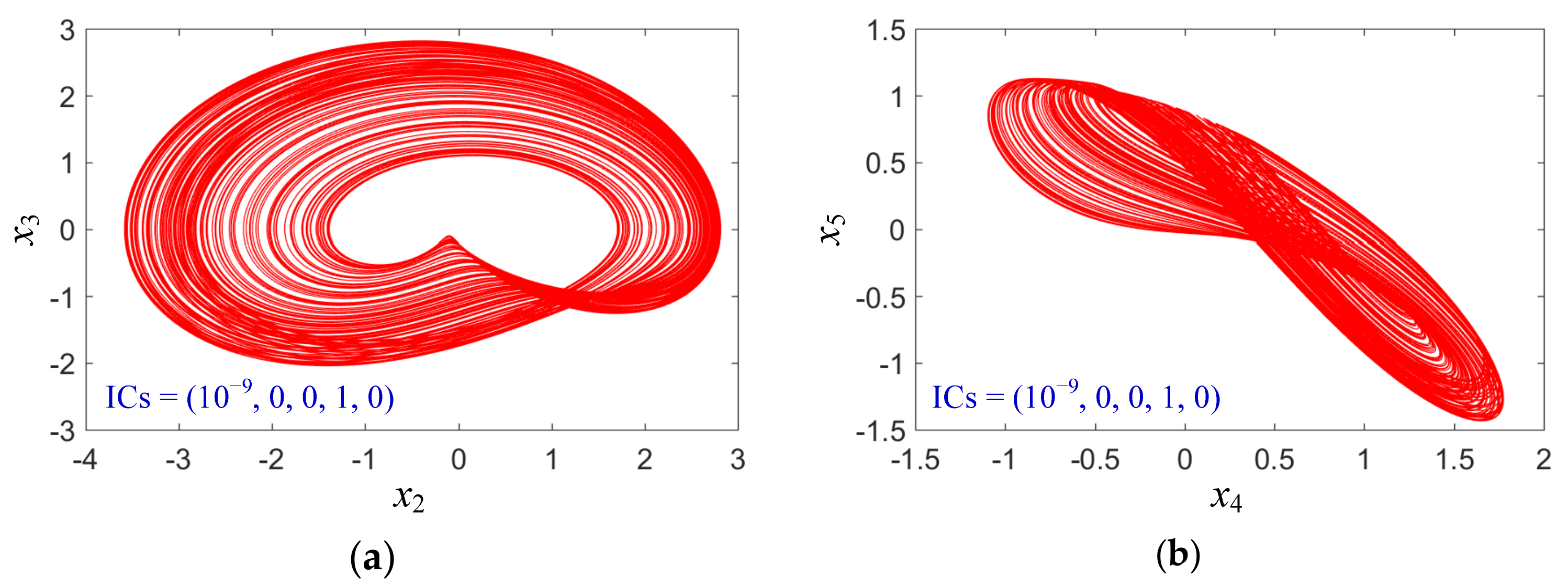
To aim at the revelation of extreme multi-stability, two positive control parameters in (6) are kept unchanged as a = 2.5 and b = 0.8. When the initial conditions are fixed as ICs = (10−9, 0, 0, 1, 0) and the two changeable coupling coefficients are determined as k1 = 1 and k2 = 2.3, the 5-D TMJ system can generate a representative chaotic attractor, whose phase portraits in two different planes are depicted in Figure 1. Here, a MATLAB ODE45 algorithm with time-step 0.01 and time-span (400, 1000) is utilized. The results show that chaotic dynamics can be established in the 5-D TMJ system.
2.2. Coupling Coefficient-Reliant Complex Dynamics
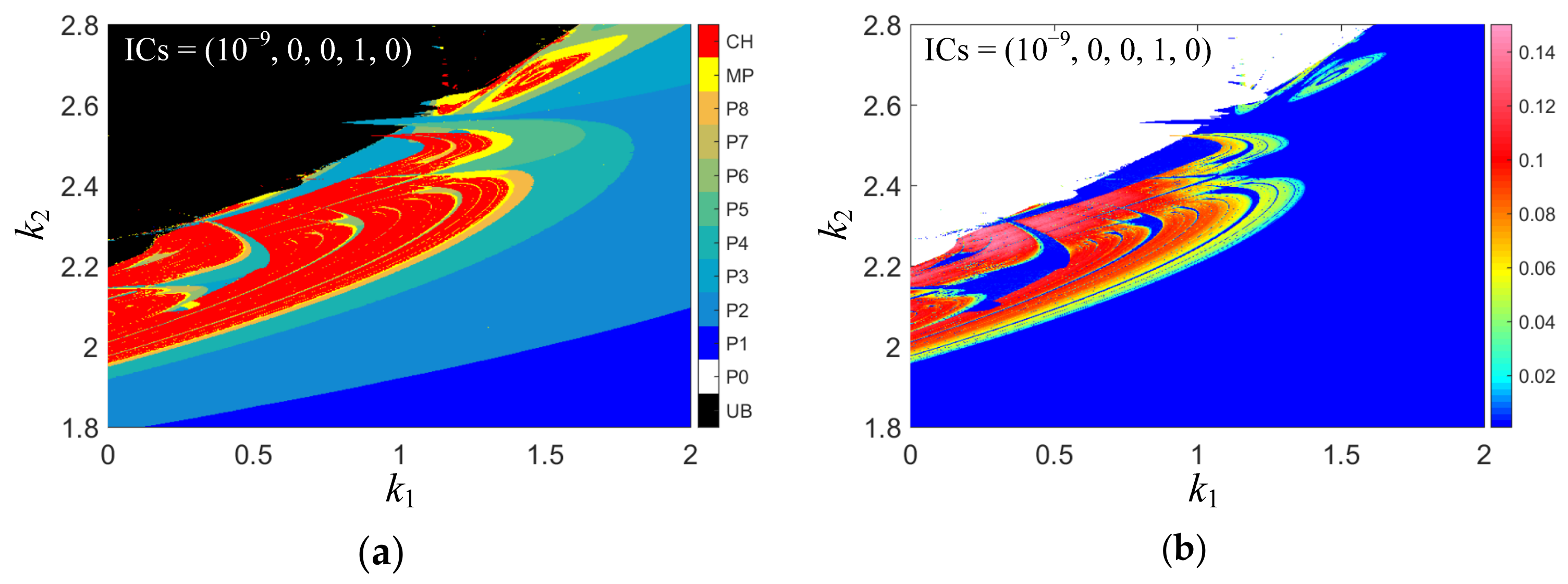
Bifurcation diagram and Lyapunov exponent (LE) spectra of a dynamical system are taken as two dynamical indicators to characterize the type of bifurcation scenario giving rise to chaos. To show complex dynamical behaviors in system (6) intuitively, the two-parameter bifurcation diagram and dynamical map are numerically simulated in the k1–k2 plane, as shown in Figure 2, where the initial conditions are fixed as ICs = (10−9, 0, 0, 1, 0). The two-parameter bifurcation diagram is plotted by measuring the periodicities of the state variable x1 based on a MATLAB ODE45 algorithm with time-step 0.01 and time-span (400, 1000) and the two-parameter dynamical map is depicted by calculating the maximal Lyapunov exponent (LE) based on Wolf’s Jacobi method.
In Figure 2a, the red block labeled CH represents chaos, the black block labeled UB represents unbounded behavior, the white block labeled P0 represents stable point, the yellow block labeled MP represents multi-period with the periodicity greater than 8, and the other color blocks labeled P1 to P8 represent period-1 to period-8. Meanwhile, in Figure 2b, the pink–red–yellow–cyan blocks with positive maximal LE denote chaotic behaviors and the blue blocks with zero maximal LE denote stable-point behaviors with different positions or periodic behaviors with different periodicities. Besides, the dynamical distributions described by Figure 2a,b are consistent with each other, which clarifies how the dynamical behaviors evolve in the k1–k2 plane. As can be seen from Figure 2, chaotic behaviors with several periodic windows appear in the center left part of the pictures, implying the existence of tangent bifurcations and chaos crises; the dynamical behaviors have the transitions from P1 to P2, to P4, and to P8, demonstrating the occurrence of period-doubling bifurcations.
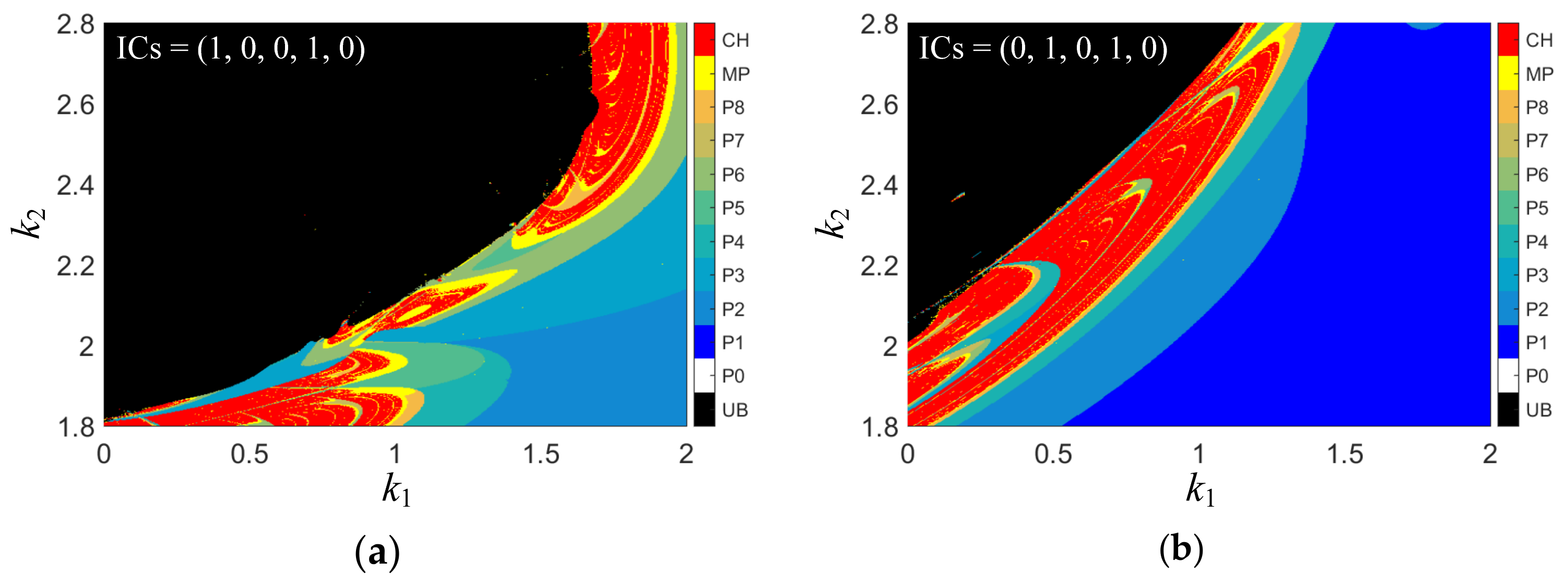
To demonstrate the dynamical effects of the initial conditions, the initial conditions of the 5-D TMJ system are considered as ICs = (1, 0, 0, 1, 0) and (0, 1, 0, 1, 0). In other words, the memristor initial conditions are kept as IC2 = (1, 0), while the non-memristor initial conditions are set to IC1 = (1, 0, 0) and (0, 1, 0), respectively. For these two different cases of the initial conditions, the dynamical distributions of the 5-D TMJ system vary greatly in the parameter intervals concerned. Under these two sets of initial conditions, the two-parameter bifurcation diagrams are numerically simulated in the k1–k2 plane, as shown in Figure 3. Looking at the dynamical distributions in Figure 2a and Figure 3, it is easy to see that they are quite different from each other. This shows that the initial conditions of different state variables have great influence on the dynamical behaviors of the 5-D TMJ system.
To describe the evolution of its dynamical behaviors with respect to the single-parameter interval, the single-parameter bifurcation diagram and LE spectra are employed. The initial conditions are set as ICs = (10−9, 0, 0, 1, 0) for simplicity.
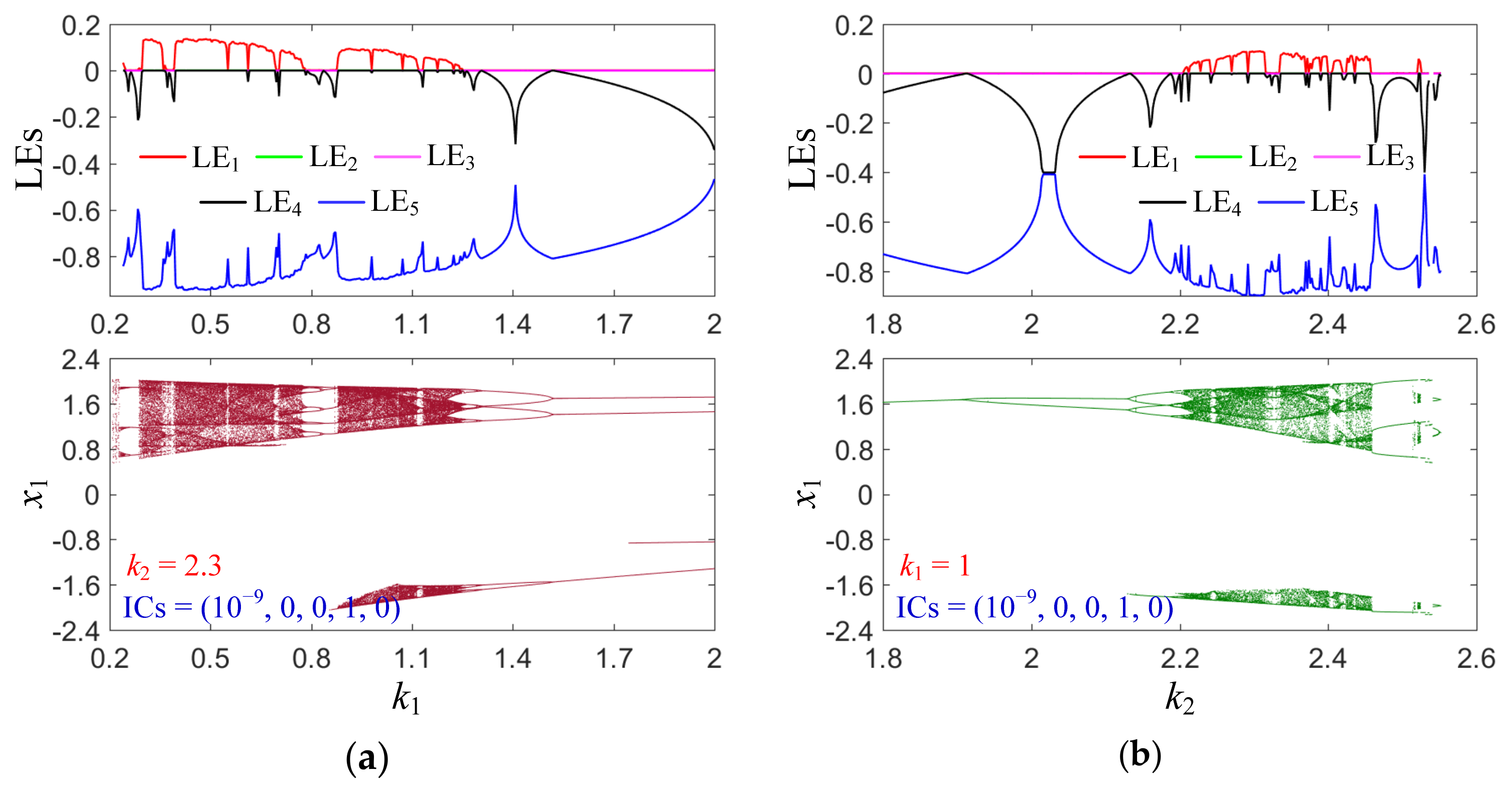
First, the coupling coefficient k2 is set as a fixed value of 2.3, and the coupling coefficient k1 varies within the interval (0.2, 2). Second, k1 = 1, and k2 varies within the interval (1.8, 2.6). The single-parameter bifurcation diagrams and the corresponding LE spectra are simulated by MATLAB software and their results are depicted in the lower half and the upper half of Figure 4, respectively. Note that the single-parameter bifurcation diagrams in the lower half of Figure 4 are acquired by plotting the local maxima of state variable x1 according to the coupling coefficients that are increased in slight steps. When increasing k1 or k2, it is found that the 5-D TMJ system under consideration can undergo abundant bifurcation scenarios and exhibit rich dynamical behaviors.
Take the case in Figure 4a as an example to illustrate the bifurcation route to chaos of the 5-D TMJ system. When increasing k1, the running orbit begins with unbounded behavior at k1 = 0.2, transfers into bounded chaotic behavior at k1 = 0.24, and rapidly degenerates into periodic behaviors via a serial of period-doubling bifurcation. Afterwards, the running orbit breaks into chaos by tangent bifurcation at k1 = 0.29. In the relatively wide interval k1 ∈ (0.29, 1.25) the 5-D TMJ system mainly works in chaos state, but accompanied by some periodic window behaviors. The largest periodic window with period-4 appears in the interval k1 ∈ (0.78, 0.88), during which the chaos crisis and tangent bifurcation happen naturally. When further increasing k1, the running orbit ultimately degenerates into periodic behaviors via serial period-doubling bifurcation. Meanwhile, for positive maximal LE, the 5-D TMJ system evolves irregularly in the folded space of a chaotic attractor, while for zero maximal LE, the 5-D TMJ system oscillates regularly on a limit cycle.
Consequently, the 5-D TMJ system can exhibit complex dynamical behaviors that are reliant on to the coupling coefficients, and its dynamical distributions in the parameter plane are greatly affected by the initial conditions of the system.
3. Memristor and Non-Memristor Initial-Condition Effects
This section focuses on the dynamical effects of the memristor and non-memristor initial conditions on the 5-D TMJ system through theoretically exploring the stability distribution of the plane equilibrium point and numerically investigating the initial-condition-related extreme multi-stability.
3.1. Stability Distribution for Plane Equilibrium Point
The equilibrium point plays an essential role in the dynamical behaviors of the system and it can be solved by setting the right-hand side of the system equations to zero. Thus, a plane equilibrium point can be easily obtained from system (6) and it can be described by:
where μ, η are two arbitrary constants, representing the initial positions of the equilibrium point S0.
Evaluated at the equilibrium point S0, the Jacobian matrix J of system (6) can be derived as follows:
It is obvious that the equilibrium point S0 has two zero roots and three nonzero roots, similar to that reported in [36]. For the nonzero roots, the corresponding cubic characteristic equation can be derived from the Jacobian matrix of system (6) at S0 as:
where
For the three nonzero roots, Routh–Hurwitz criteria for the above cubic characteristic equation are given by:
If the three criteria of (10) are satisfied, the equilibrium point S0 is stable and a point attractor appears; otherwise, S0 is unstable and periodic or chaotic behaviors may occur in system (6).
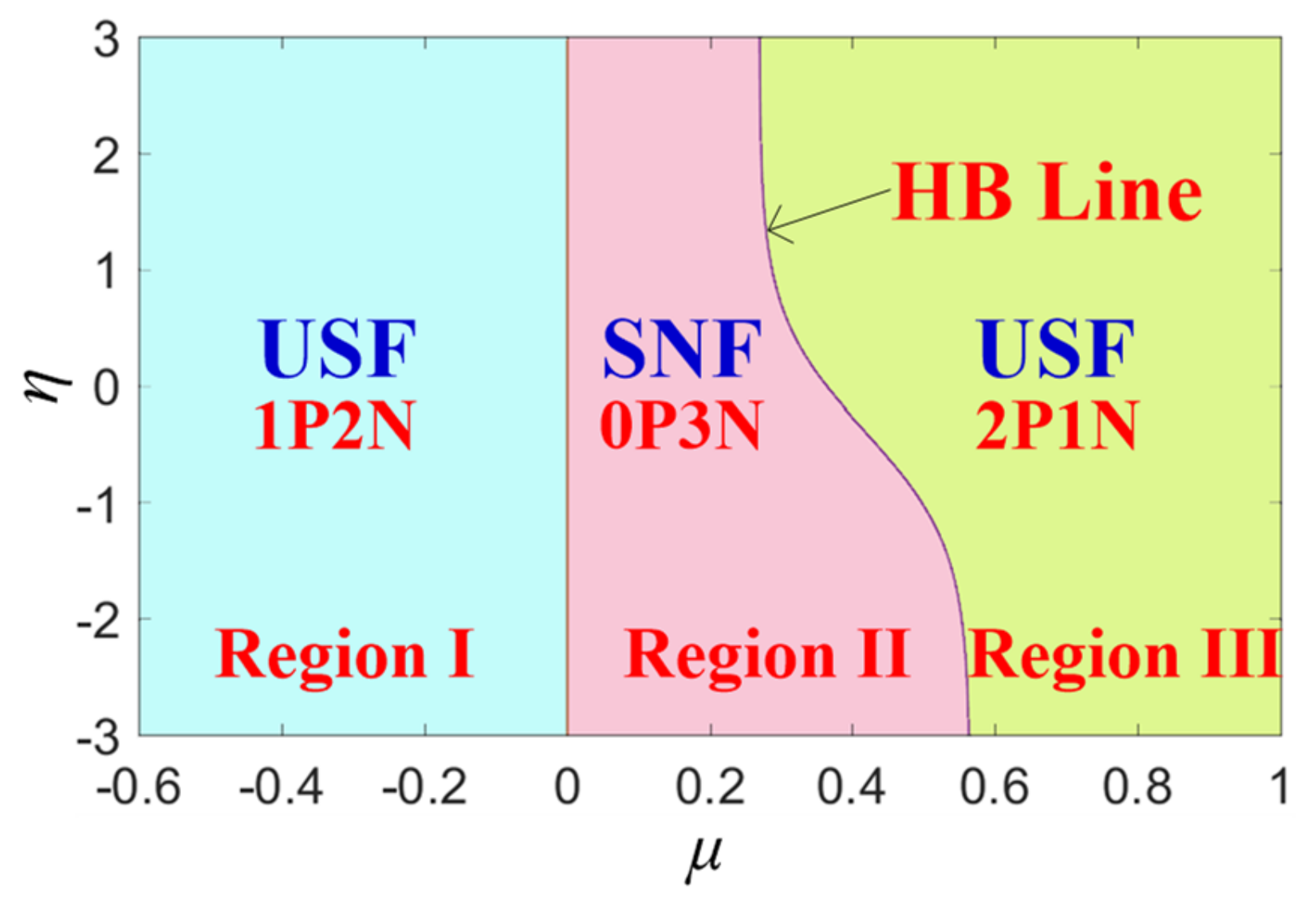
The two changeable parameters are determined as k1 = 1 and k2 = 2.3, the initial parameter μ is varied in the region (−0.5, 1), and the initial parameter η is evolved in the region (−3, 3). According to the conditions given in (10), the stability distribution identified by the three nonzero roots in the μ–η plane can be depicted, as shown in Figure 5. The different color blocks are used to divide three categories of stability regions consisting of the unstable region I, stable region II, and unstable region III. The equilibrium point S0 located in the region I and region III is the unstable saddle-focus (USF), whereas S0 in the region II is the stable node-focus (SNF). Besides, the three nonzero roots marked by 0P3N represent the three negative real parts with no positive real part, and the three nonzero roots marked by 1P2N and 2P1N represent the one and two positive real parts, respectively. Particularly, the boundary marked by HB line between the region II and region III is the Hopf bifurcation (HB) line. Therefore, different types of attractors’ behaviors may emerge in the different stability regions, such as point, periodic, chaotic, and unbounded behaviors, demonstrating that the dynamical behaviors are extremely dependent on the initial positions of the equilibrium point S0, i.e., the initial conditions of two memristors.
Due to the existence of two zero roots, the aforementioned SNF for S0 is critically stable, indicating that the stability of system (6) cannot be effectively judged only by the three nonzero roots [19]. Just for intuition’s sake, the initial conditions are determined as ICs = (10−9, 0, 0, μ, η). For different values of μ and η located in different regions of Figure 5, the three nonzero roots, stability regions, and attractor types are numerically simulated, as listed in Table 1. Consequently, for different values of μ and η, various kinds of attractors appear in system (6), leading to the emergence of extreme multi-stability.
The results from Figure 5 and Table 1 demonstrate that, with the variations of the memristor initials μ and η, system (6) derives multiple stability distributions and presents complex dynamical behaviors. Particularly, the unbounded behavior appears in system (6) under a very large region of memristor initial conditions, meaning that system (6) is less robust to the initial conditions. Besides, the stable-point attractors also appear in the unstable region I, and are triggered by the two zero roots of S0.
3.2. Initial-Condition-Related Extreme Multi-Stability
The local basin of attraction is the attracting region of a steady-state attractor in the plane of two initial conditions, within which any initial conditions will settle down to the attractor. The above analysis results indicate that the 5-D TMJ system can produce extreme multi-stability dependent on the memristor initial conditions. Thus, the memristor initial conditions are taken as two invariant measures for classifying the coexisting infinitely many attractors’ behaviors [27,40]. Note that the local basin of attraction is colorfully drawn by calculating the periodicities of the state variable x1 based on a MATLAB ODE45 algorithm with time-step 0.01 and time-span (400, 1000), regardless of the structure and position of the generated attractor.
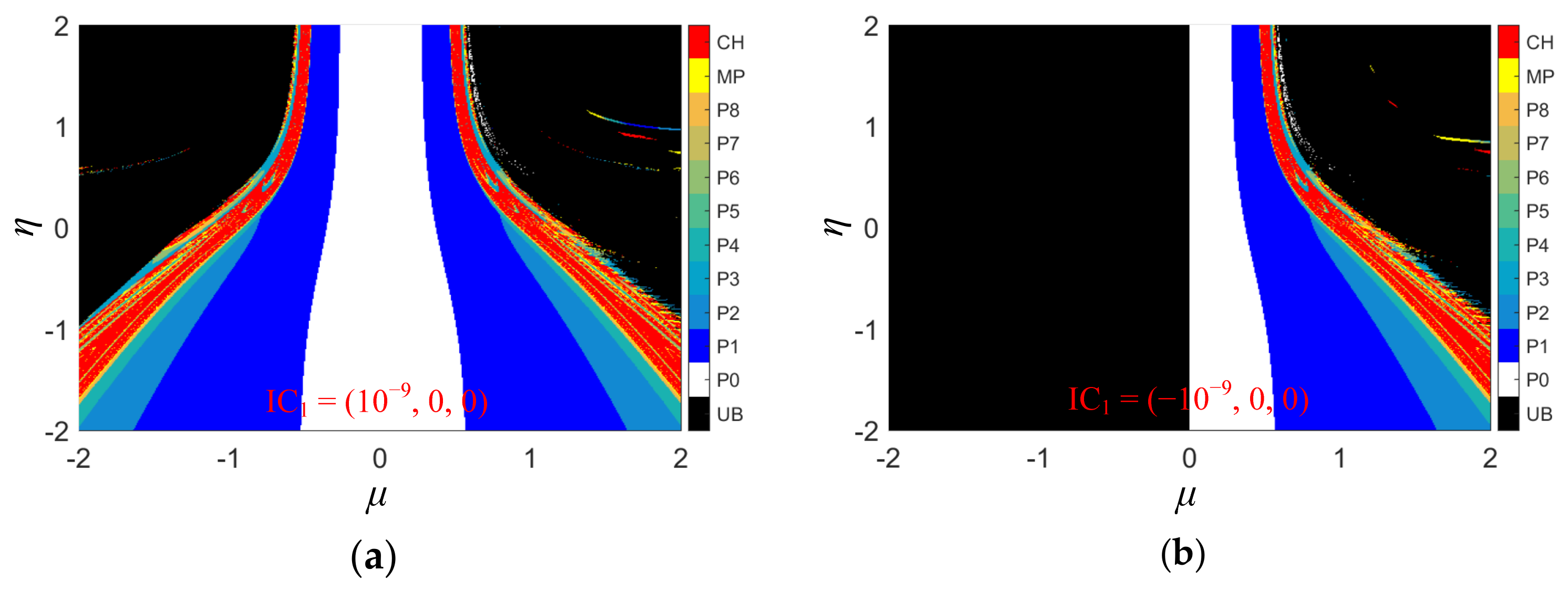
The representative parameters are determined as a = 2.5, b = 0.8, k1 = 1, and k2 = 2.3, and the memristor initial conditions are denoted as IC2 = (x4(0), x5(0)) = (μ, η). To depict the local basin of attraction, we examine the periodicities of the state variable x1 at each point in the μ–η plane. For two sets of tiny non-memristor initial conditions of IC1 = (10−9, 0, 0) and IC1 = (−10−9, 0, 0), the local basins of attraction in the μ–η plane are measured and the results are shown in Figure 6. The color blocks represent the memristor initial conditions that trigger the trajectories of different dynamical behaviors, which are exactly the same as those used in Figure 2a. As a result, the 5-D TMJ system can exhibit complex dynamical behaviors closely dependent on the memristor initial conditions, indicating the emergence of extreme multi-stability therein.
Particularly, as revealed in Figure 6, the local basins of attraction with IC1 = (10−9, 0, 0) and (−10−9, 0, 0) are very different. The attracting regions in Figure 6a are completely symmetric with respect to μ, while the right half of the attracting regions in Figure 6b is exactly the same as that in Figure 6a, but the left half is unbounded. This is shocking that completely different dynamical behaviors appear in the μ–η plane when the initial condition x1(0) is slightly varied. Unfortunately, the dynamical mechanism is quite difficult to be identified based on the mathematical model of system (6).
Moreover, because there are extremely small differences in the initial condition x1(0), the dynamical distributions depicted by Figure 6a are different from those depicted by Figure 2, but the dynamical distributions depicted by Figure 6b are similar to those depicted by Figure 5. This is an unexpected and very interesting result.
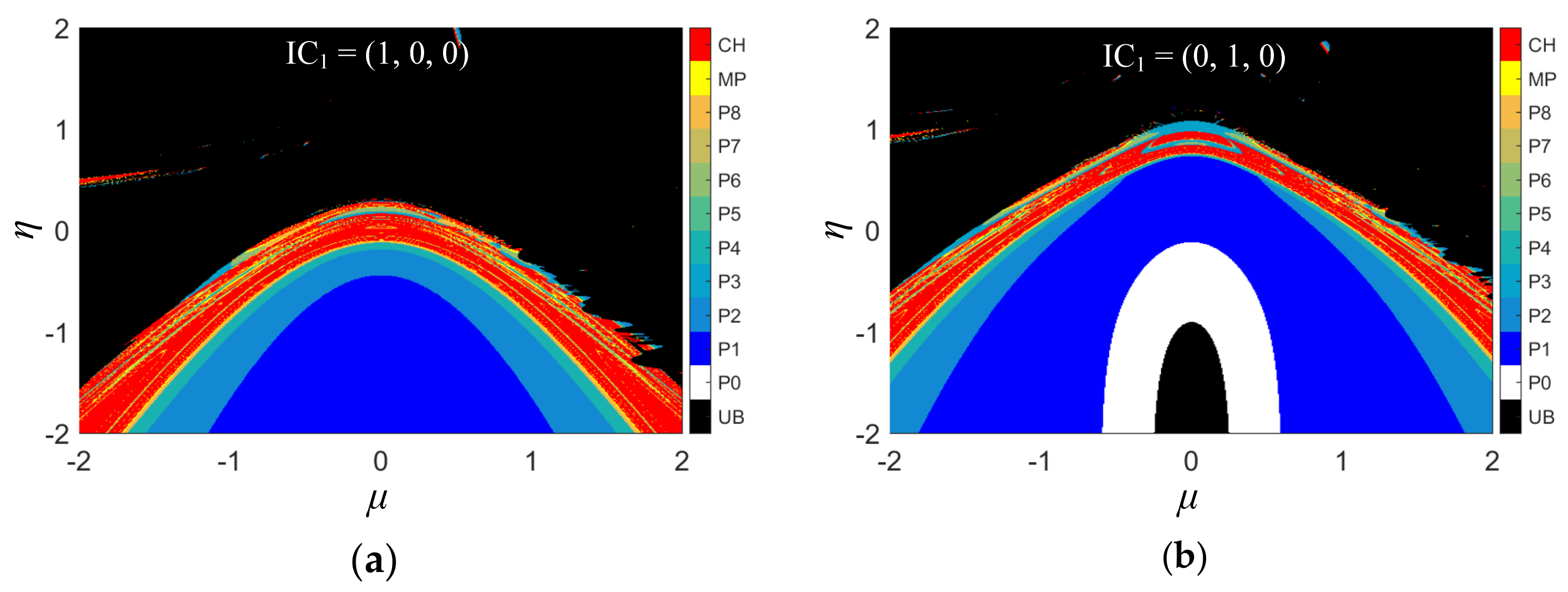
For manifesting dynamical effects of the non-memristor initial conditions, two sets of large non-memristor initial conditions of IC1 = (1, 0, 0) and IC1 = (0, 1, 0) are employed. Accordingly, the local basins of attraction in the μ–η plane are measured and their results are shown in Figure 7. As can be seen, with the changes of the non-memristor initial conditions, the left and right attracting regions appeared in the cases of tiny non-memristor initial conditions are connected as a whole, and the bounded behaviors are mainly confined to the lower plane regions of the memristor initial conditions. In brief, the simulated results further demonstrate that the non-memristor initial conditions have a great influence on the dynamical behaviors of the 5-D TMJ system.
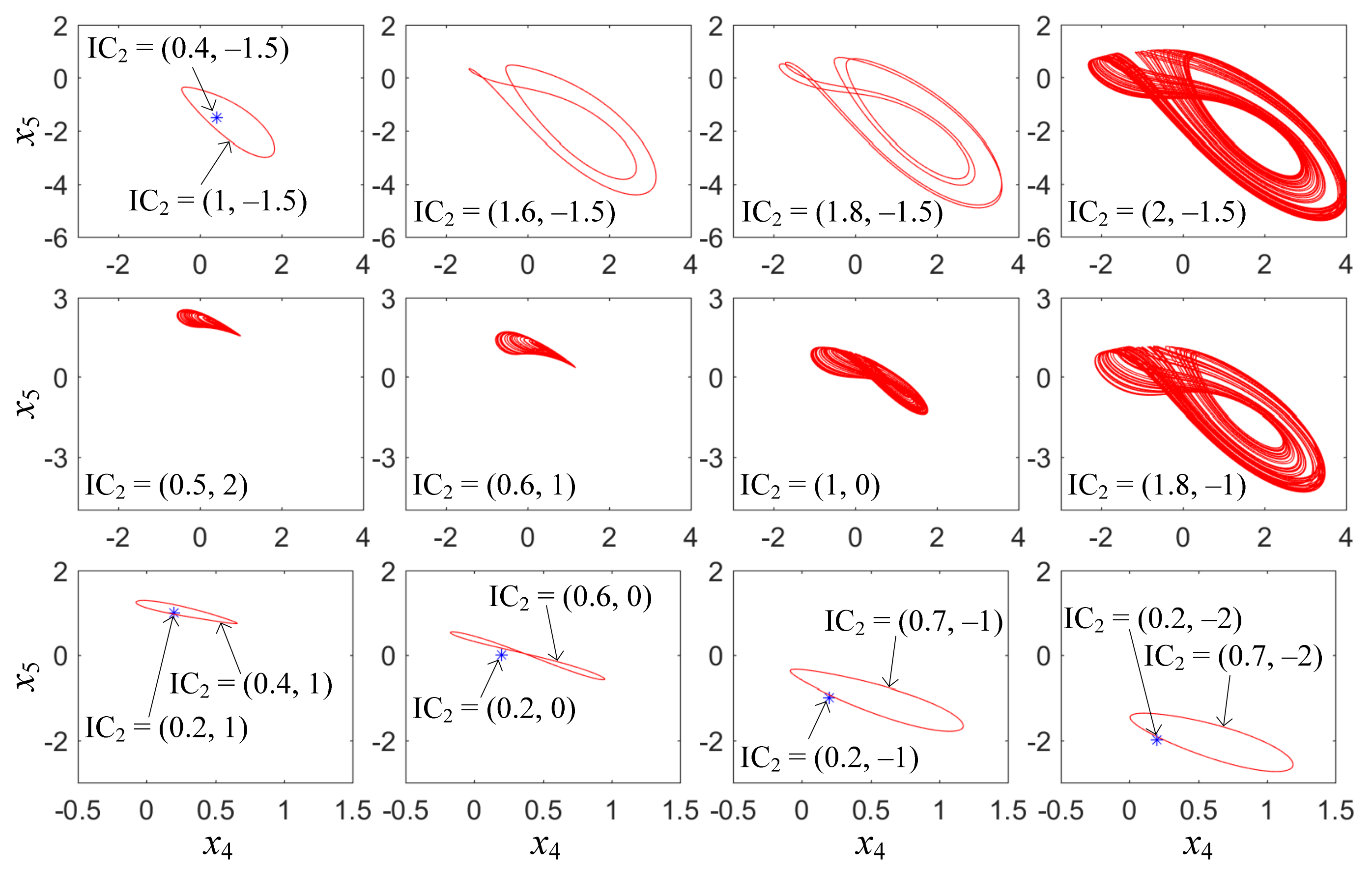
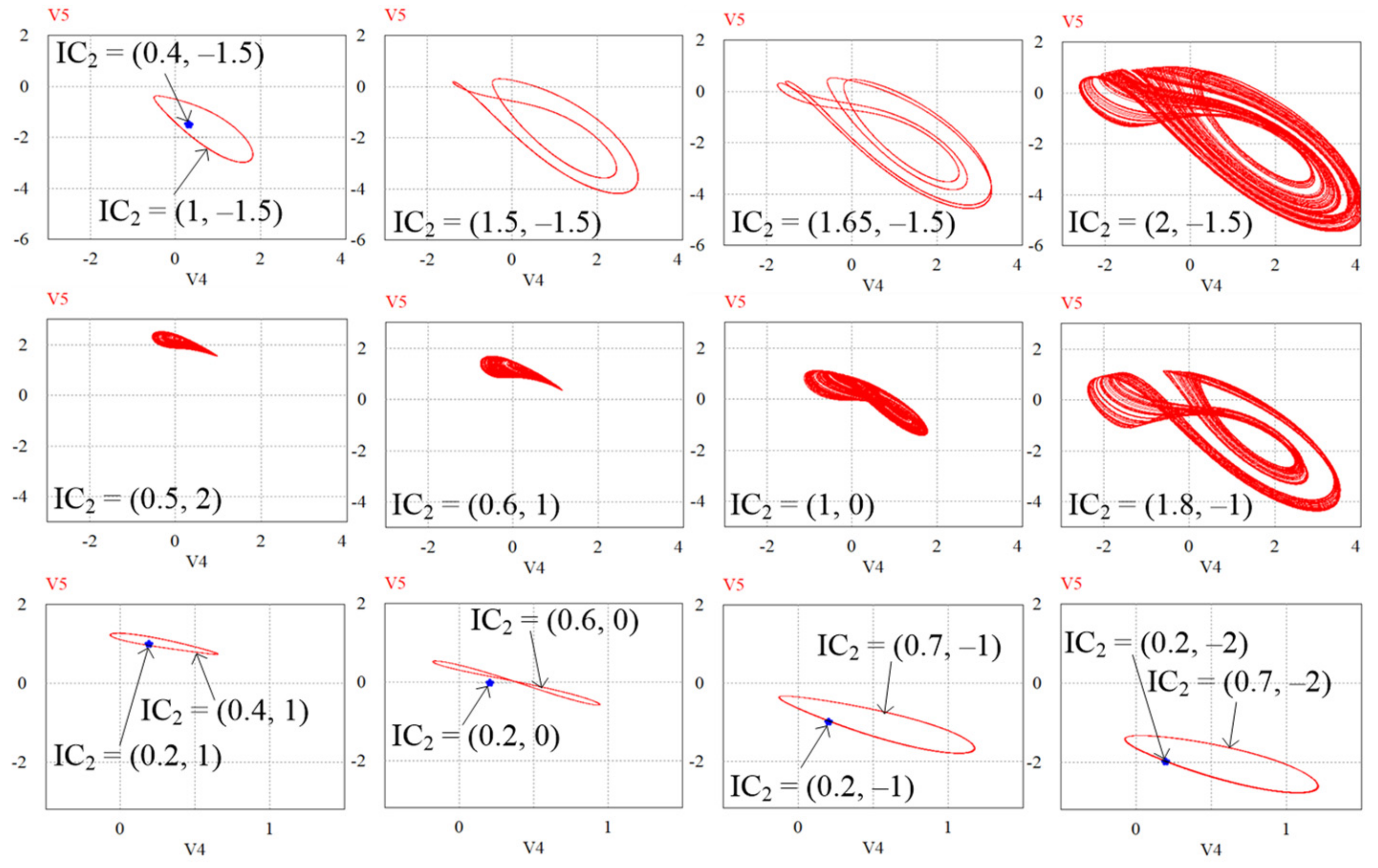
Referring to the local basin of attraction revealed in Figure 6a, the memristor initial condition-induced attractors are measured to verify the coexistence of infinitely many attractors in the 5-D TMJ system. For some representative memristor initial conditions IC2, the phase portraits of the induced attractors in the x4–x5 plane are depicted in Figure 8, where the stable point attractors are marked by the symbol “*”. For better visual effect, only partial phase portraits of the induced attractors are simulated in Figure 8, but they sufficiently demonstrate the memristor initial-condition-related extreme multi-stability. In fact, more phase portraits of the induced attractors with different structures, periodicities, and positions can be numerically measured from the 5-D TMJ system, indicating the appearance of the coexisting infinitely many attractors’ behaviors.
4. Analog and Digital Implementations
This section designs an analog circuit and a digital microcontroller-based hardware platform for implementing the 5-D TMJ system. The PSIM circuit simulations and experimental measurements acquire the memristor initial condition-induced attractors to validate the numerical simulations.
4.1. Analog Circuit Design and PSIM Circuit Simulations
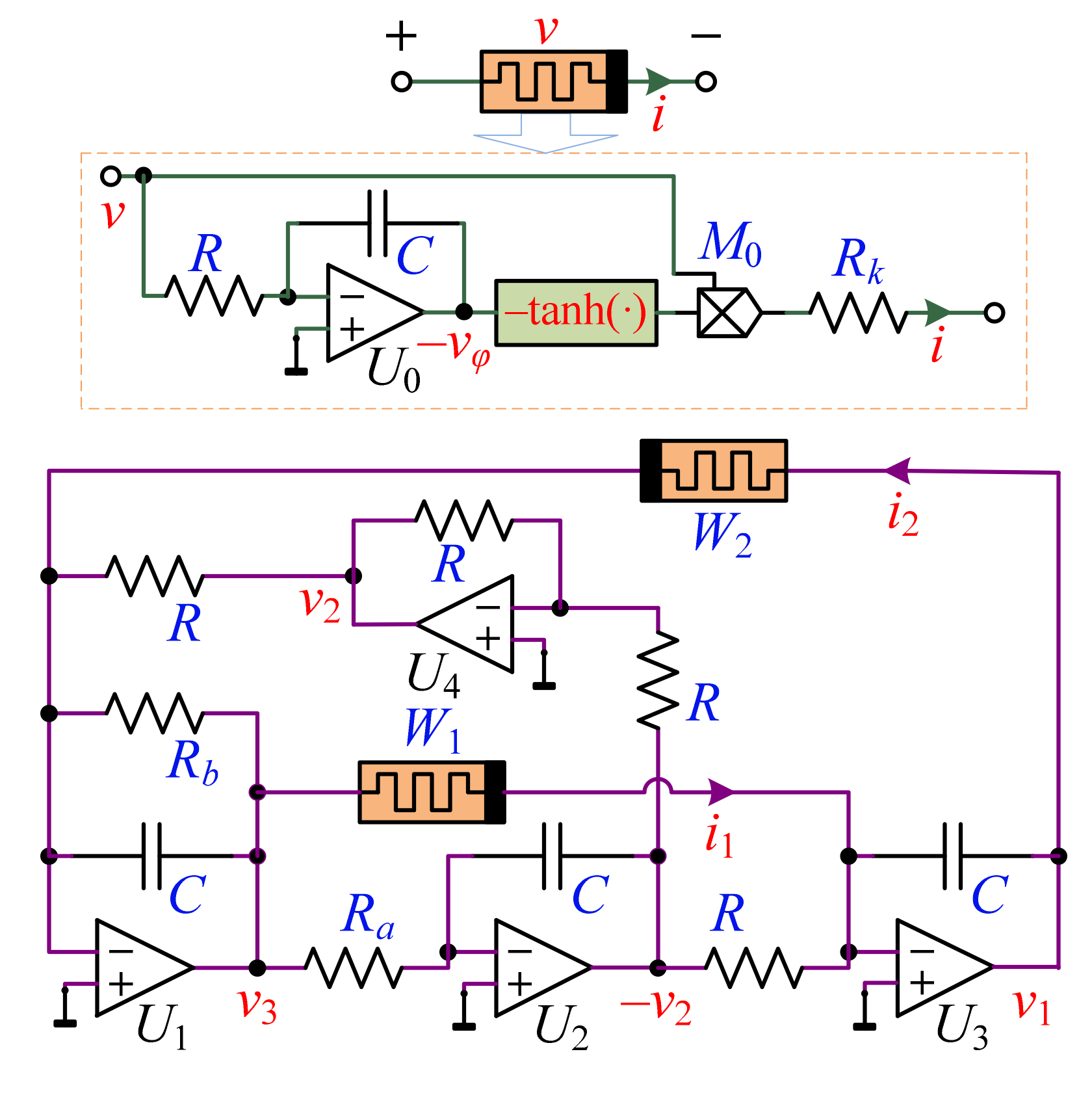
PSIM (Power Simulation) circuit simulations are employed to verify the dynamical effects of the initial conditions on the 5-D TMJ system using a physical circuit. Based on the mathematical model given in (6), an analog implementation circuit in a jerk-circuit form is designed for the 5-D TMJ system and its circuit schematic is shown in Figure 9. Here, the memristor used in system (6) is implemented equivalently by the circuit module shown at the top of Figure 9, where the −tanh(·) module can be defined by a function module in PSIM software. When the two capacitor voltages v3 and v1 are taken as the input voltages of two memristors, respectively, the generated currents i1 and i2 can be expressed as:
where τ0 = RC is the integration time constant, v4 and v5 stand for the capacitor voltages of the memristor circuit modules, g1 and g2 represent the multiplier gains of the memristor circuit modules, and Rk1 and Rk2 are used for adjusting the two coupling coefficients.
Usually, the multiplier gains g1 and g2 are fixed as 1, and the integration time constant τ0 = RC set to 10 kΩ × 100 nF = 1 ms. Thus, the resistances Ra and Rb in the main circuit are determined by Ra = R/a and Rb = R/b, and the resistances Rk1 and Rk2 in the memristor circuit modules are obtained by Rk1 = R/k1 and Rk2 = R/k2. For the representative control parameters a = 2.5 and b = 0.8, as well as the coupling coefficients k1 = 1 and k2 = 2.3, the four resistances can be calculated as Ra = 4 kΩ, Rb = 12.5 kΩ, Rk1 = 10 kΩ, and Rk2 = 4.3478 kΩ. Besides, two inverters should be connected to the capacitor voltage terminals of the memristor circuit modules to achieve the same results of circuit simulations and numerical simulations.
The three initial capacitor voltages in the main circuit are preset as v1(0) = 1 nV, v2(0) = 0 V, and v3(0) = 0 V, and only the two initial capacitor voltages v4(0) and v5(0) of the memristor circuit modules are adjustable to acquire the desired phase portraits. Corresponding to the numerical simulations shown in Figure 8, the phase portraits of the induced attractors in the plane of v4 and v5 are simulated by PSIM software and the measured outputs under different values of v4(0) and v5(0) are displayed in Figure 10, where IC2 = (v4(0), v5(0)). Therefore, the circuit simulations in Figure 10 validate the memristor initial condition-induced attractors revealed in Figure 8, indicating the feasibility of the designed circuit.
4.2. Digital Hardware Platform and Experiments
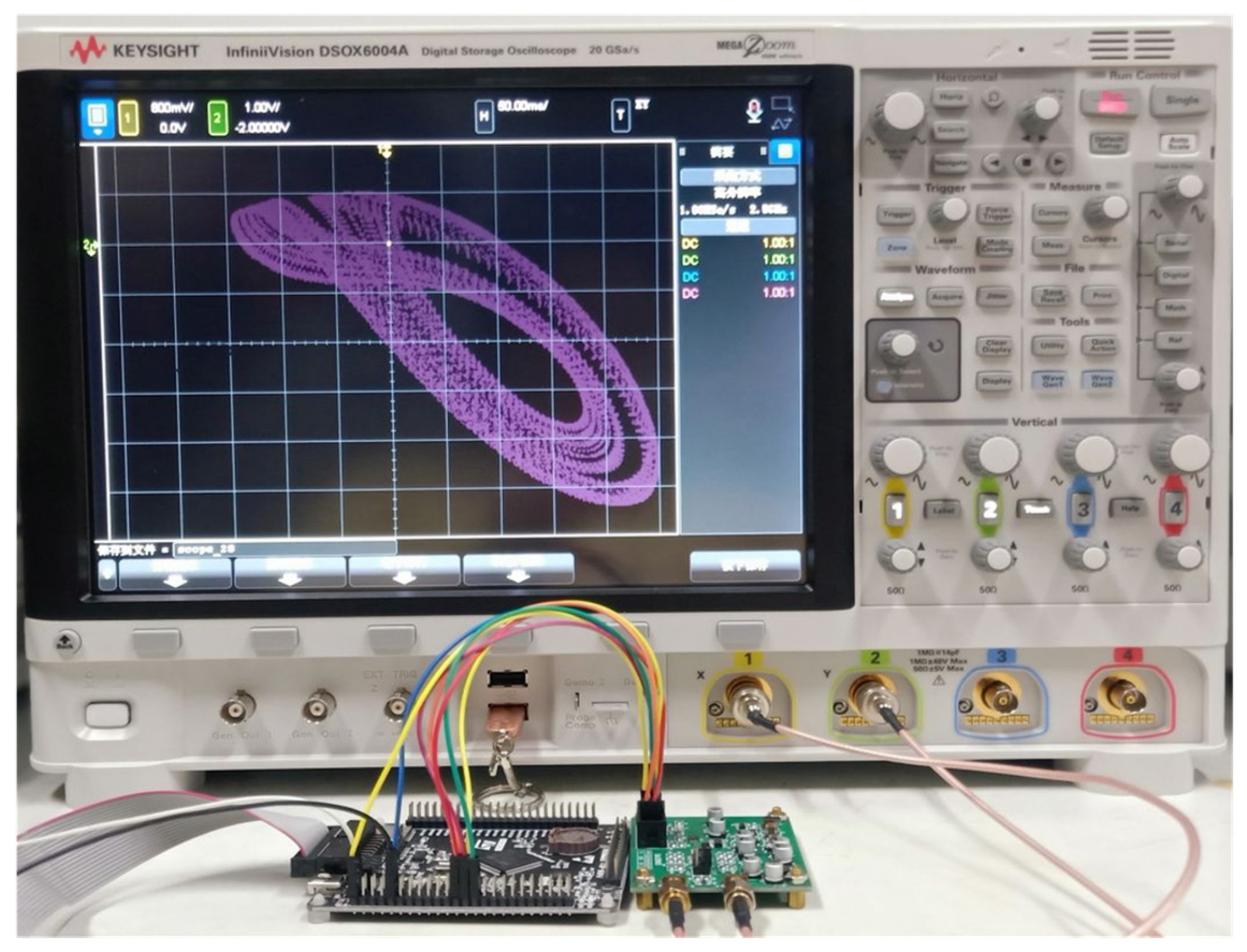
Based on a pony-size and low-cost microcontroller, a digitally circuit-implemented hardware platform can be developed for the 5-D TMJ system, in which STM32F407VET6 microcontroller with 32-bit RISC core and DAC8563 digital-to-analog (D/A) converter are utilized. According to the mathematical model given in (6), a discrete-time mathematical model is built by means of the fourth-order Runge–Kutta algorithm, which can be coded in C language and uploaded to the microcontroller. All the system parameters and non-memristor initial conditions are determined in advance, and only the memristor initial conditions are adjusted to acquire the desired phase portraits using a digital oscilloscope.
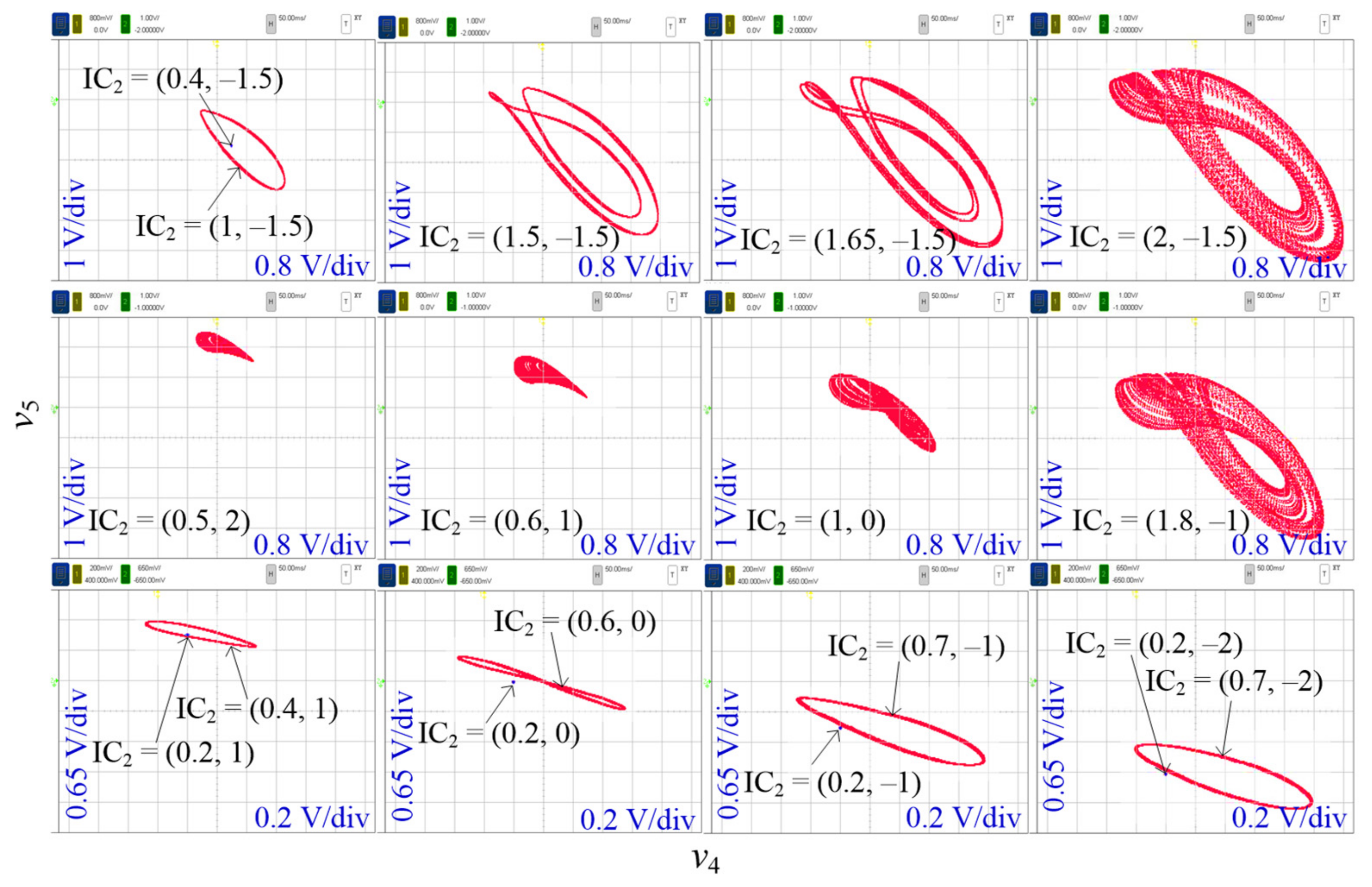
Figure 11 displays the digitally circuit-implemented hardware platform for the 5-D TMJ system and the memristor initial condition-induced attractors acquired by the digital oscilloscope. Similarly, following the numerical simulations shown in Figure 8, the phase portraits of the induced attractors in the plane of v4 and v5 are acquired, as shown in Figure 12, where the memristor initial conditions IC2 = (v4(0), v5(0)) are changed as different values according to those given in Figure 8. Therefore, the experimentally acquired results in Figure 12 validate the numerical results well, reflecting the feasibility of the digitally circuit-implemented hardware platform.
5. Conclusions
In this paper, a new 5-D nonlinear dynamical system based on two memristors was presented by introducing two memristors to a simple jerk system, and its complex dynamics related to the coupling coefficients under different memristor initial conditions were studied using multiple numerical methods. Emphatically, the dynamical effects of the memristor and non-memristor initial conditions on the 5-D TMJ system were explored by theoretical analyses and numerical simulations, which were validated by PSIM circuit simulations and microcontroller-based hardware experiments. However, because of the two zero roots caused by the plane equilibrium point, the dynamical mechanism of the initial-condition effects on the 5-D TMJ system cannot be effectively explained only by the stability distributions of the three nonzero roots. To address this issue, an incremental integral reconstitution model can be used for elaborating the dynamical mechanism of the initial-condition effects [19,35], which deserves further study.
Author Contributions
Conceptualization, H.B. and M.H.; methodology, R.D.; software, H.B.; validation, M.H. and H.W.; investigation, H.B. and R.D.; writing—original draft preparation, H.B.; writing—review and editing, B.C.; supervision, H.W. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the National Natural Science Foundation of China, grant numbers 51777016 and 12172066, the Natural Science Foundation of Jiangsu Province, China, grant numbers BK20210850 and BK20191451, and the Scientific Research Foundation of Jiangsu Provincial Education Department, China, grant number 21KJB510001.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Data generated during the current study will be made available at reasonable request.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Almatroud, O.A.; Tamba, V.K.; Grassi, G.; Pham, V.T. An oscillator without linear terms: Infinite equilibria, chaos, realization, and application. Mathematics 2021, 9, 3315. [Google Scholar] [CrossRef]
- He, S.B.; Wang, H.H.; Sun, K.H. Solutions and memory effect of fractional-order chaotic system: A review (Interdisciplinary Physics). Chin. Phys. B 2021. [Google Scholar] [CrossRef]
- Volos, C.K.; Akgul, A.; Pham, V.T.; Baptista, M.S. Antimonotonicity, crisis and multiple attractors in a simple memristive circuit. Circuits Syst. J. Comput. 2018, 27, 1850026. [Google Scholar] [CrossRef]
- Vijayakumar, M.D.; Karthikeyan, A.; Zivcak, J.; Krejcar, O.; Namazi, H. Dynamical behavior of a new chaotic system with one stable equilibrium. Mathematics 2021, 9, 3217. [Google Scholar]
- Rajagopal, K.; Shekofteh, Y.; Nazarimehr, F.; Li, C.; Jafari, S. A new chaotic multi-stable hyperjerk system with various types of attractors. Indian J. Phys. 2021, 2021, 1–7. [Google Scholar] [CrossRef]
- Jin, M.X.; Sun, K.H.; Wang, H.H. Dynamics and synchronization of the complex simplified Lorenz system. Nonlinear Dyn. 2021, 106, 2667–2677. [Google Scholar] [CrossRef]
- Pham, V.T.; Jafari, S.; Kapitaniak, T. Constructing a chaotic system with an infinite number of equilibrium points. Int. J. Bifurc. Chaos 2016, 26, 1650225. [Google Scholar] [CrossRef]
- Danca, M.-F.; Kuznetsov, N. D3 dihedral Logistic map of fractional order. Mathematics 2022, 10, 213. [Google Scholar] [CrossRef]
- Zhou, L.; Wang, C.H.; Zhou, L.L. A novel no-equilibrium hyperchaotic multiwing system via introducing memristor. Int. J. Circuit Theory Appl. 2018, 46, 84–98. [Google Scholar] [CrossRef]
- Nazarimehr, F.; Rajagopal, K.; Kengne, J.; Jafari, S.; Pham, V.T. A new four-dimensional system containing chaotic or hyper-chaotic attractors with no equilibrium, a line of equilibria and unstable equilibria. Chaos Solitions Fractals 2018, 111, 108–118. [Google Scholar] [CrossRef]
- Yang, Q.G.; Yang, L.B.; Ou, B. Hidden hyperchaotic attractors in a new 5D system based on chaotic system with two stable node-foci. Int. J. Bifurcation Chaos 2019, 29, 1950092. [Google Scholar] [CrossRef]
- Li, K.X.; Bao, H.; Li, H.Z.; Ma, J.; Hua, Z.Y.; Bao, B.C. Memristive Rulkov neuron model with magnetic induction effects. IEEE Trans. Ind. Inform. 2022, 18, 1726–1736. [Google Scholar] [CrossRef]
- Bao, H.; Hua, Z.Y.; Li, H.Z.; Chen, M.; Bao, B.C. Memristor-based hyperchaotic maps and application in auxiliary classifier generative adversarial nets. IEEE Trans. Ind. Inform. 2021. [Google Scholar] [CrossRef]
- Cang, S.J.; Li, Y.; Zhang, R.Y.; Wang, Z.H. Hidden and self-excited coexisting attractors in a Lorenz-like system with two equilibrium points. Nonlinear Dyn. 2019, 95, 381–390. [Google Scholar] [CrossRef]
- Mezatio, B.A.; Motchongom, M.T.; Tekam, B.R.W.; Kengne, R.; Tchitnga, R.; Fomethe, A. A novel memristive 6D hyperchaotic autonomous system with hidden extreme multistability. Chaos Solitions Fractals 2019, 120, 100–115. [Google Scholar] [CrossRef]
- Njitacke, Z.T.; Koumetio, B.N.; Ramakrishnan, B.; Leutcho, G.D.; Fozin, T.F.; Tsafack, N.; Rajagopal, K.; Kengne, J. Hamiltonian energy and coexistence of hidden firing patterns from bidirectional coupling between two different neurons. Cogn. Neurodyn. 2021, 1–18. [Google Scholar] [CrossRef]
- Chen, B.; Xu, Q.; Chen, M.; Wu, H.G.; Bao, B.C. Initial condition-switched boosting extreme multistability and mechanism analysis in memcapacitive oscillator. Front. Inform. Technol. Electron. Eng. 2021, 22, 1517–1531. [Google Scholar] [CrossRef]
- Njitacke, Z.T.; Kengne, J.; Kengne, L.K. Antimonotonicity, chaos and multiple coexisting attractors in a simple hybrid diode-based jerk circuit. Chaos Solitions Fractals 2017, 105, 77–99. [Google Scholar] [CrossRef]
- Chen, M.; Sun, M.X.; Bao, H.; Hu, Y.H.; Bao, B.C. Flux-charge analysis of two-memristor-based Chua’s circuit: Dimensionality decreasing model for detecting extreme multistability. IEEE Trans. Ind. Electron. 2020, 67, 2197–2206. [Google Scholar] [CrossRef]
- Wang, C.H.; Xia, H.; Zhou, L. A memristive hyperchaotic multiscroll jerk system with controllable scroll numbers. Int. J. Bifurcation Chaos 2017, 27, 1750091. [Google Scholar] [CrossRef] [Green Version]
- Zhang, H.Y.; Sun, K.H.; He, S.B. A fractional-order ship power system with extreme multistability. Nonlinear Dyn. 2021, 106, 1027–1040. [Google Scholar] [CrossRef]
- Hou, L.P.; Bao, H.; Xu, Q.; Chen, M.; Bao, B.C. Coexisting infinitely many nonchaotic attractors in a memristive weight-based tabu learning neuron. Int. J. Bifurcation Chaos 2021, 31, 2150189. [Google Scholar] [CrossRef]
- Xu, Q.; Liu, T.; Feng, C.T.; Bao, H.; Wu, H.G.; Bao, B.C. Continuous non-autonomous memristive Rulkov model with extreme multistability. Chin. Phys. B 2021, 30, 128702. [Google Scholar] [CrossRef]
- Jafari, S.; Sprott, J.C.; Molaie, M. A simple chaotic flow with a plane of equilibria. Int. J. Bifurcation Chaos 2016, 26, 1650098. [Google Scholar] [CrossRef]
- Ye, X.L.; Wang, X.Y.; Zhao, H.Y.; Gao, H.; Zhang, M. Extreme multistability in a new hyperchaotic meminductive circuit and its circuit implementation. Eur. Phys. J. Plus 2019, 134, 206. [Google Scholar] [CrossRef]
- Pham, V.T.; Volos, C.K.; Kapitaniak, T.; Jafari, S.; Wang, X. Dynamics and circuit of a chaotic system with a curve of equilibrium points. Int. J. Electron. 2018, 105, 385–397. [Google Scholar] [CrossRef]
- Bao, H.; Chen, M.; Wu, H.G.; Bao, B.C. Memristor initial-boosted coexisting plane bifurcations and its extreme multi-stability reconstitution in two-memristor-based dynamical system. Sci. China Technol. Sci. 2020, 63, 603–613. [Google Scholar] [CrossRef]
- Zhang, J.H.; Liao, X.F. Synchronization and chaos in coupled memristor-based FitzHugh-Nagumo circuits with memristor synapse. AEÜ Int. J. Electron. Commun. 2017, 75, 82–90. [Google Scholar] [CrossRef]
- Ding, D.W.; Luo, J.; Shan, X.Y.; Hu, Y.B.; Yang, Z.L.; Ding, L.H. Coexisting behaviors of a fraction-order novel hyperbolic-type memristor Hopfield neuron network based on three neurons. Int. J. Modern Phys. B 2020, 34, 2050302. [Google Scholar] [CrossRef]
- Jafari, S.; Ahmadi, A.; Panahi, S.; Rajagopal, K. Extreme multi-stability: When imperfection changes quality. Chaos Solitions Fractals 2018, 108, 182–186. [Google Scholar] [CrossRef]
- Njitacke, Z.T.; Kengne, J.; Tapche, R.W.; Pelap, F.B. Uncertain destination dynamics of a novel memristive 4D autonomous system. Chaos Solitions Fractals 2018, 107, 177–185. [Google Scholar] [CrossRef]
- Yuan, F.; Wang, G.Y.; Wang, X.W. Extreme multistability in a memristor-based multi-scroll hyper-chaotic system. Chaos 2016, 26, 073107. [Google Scholar] [CrossRef]
- Li, C.B.; Sprott, J.C. An infinite 3-D quasiperiodic lattice of chaotic attractors. Phys. Lett. A 2018, 382, 581–587. [Google Scholar] [CrossRef]
- Li, C.B.; Peng, Y.X.; Tao, Z.; Sprott, J.C.; Jafari, S. Coexisting infinite equilibria and chaos. Int. J. Bifurcation Chaos 2021, 31, 2130014. [Google Scholar] [CrossRef]
- Zhang, Y.Z.; Liu, Z.; Wu, H.G.; Chen, S.Y.; Bao, B.C. Two-memristor-based chaotic system and its extreme multistability reconstitution via dimensionality reduction analysis. Chaos Solitions Fractals 2019, 127, 354–363. [Google Scholar] [CrossRef]
- Xu, Q.; Ju, Z.T.; Ding, S.K.; Feng, C.T.; Chen, M.; Bao, B.C. Electromagnetic induction effects on electrical activity within a memristive Wilson neuron model. Cogn. Neurodyn. 2022, 1–11. [Google Scholar] [CrossRef]
- Min, F.H.; Cheng, Y.Z.; Lu, L.; Li, X.Y. Extreme multistability and antimonotonicity in a Shinriki oscillator with two flux-controlled memristors. Int. J. Bifurcation Chaos 2021, 31, 2150167. [Google Scholar] [CrossRef]
- Li, C.B.; Min, F.H.; Jin, Q.S.; Ma, H.Y. Extreme multistability analysis of memristor-based chaotic system and its application in image decryption. AIP Adv. 2017, 7, 125204. [Google Scholar] [CrossRef]
- Kengne, J.; Njitacke, Z.T.; Fotsin, H.B. Dynamical analysis of a simple autonomous jerk system with multiple attractors. Nonlinear Dyn. 2016, 83, 751–765. [Google Scholar] [CrossRef]
- Strelioff, C.C.; Hübler, A.W. Medium-term prediction of chaos. Phys. Rev. Lett. 2006, 96, 044101. [Google Scholar] [CrossRef] [Green Version]
Figure 1.
Phase portraits of the representative chaotic attractor in two different planes: (a) phase portrait in the x2–x3 plane, and (b) phase portrait in the x4–x5 plane.
Figure 1.
Phase portraits of the representative chaotic attractor in two different planes: (a) phase portrait in the x2–x3 plane, and (b) phase portrait in the x4–x5 plane.

Figure 2.
Two-parameter bifurcation diagram and dynamical map in the k1–k2 plane for ICs = (10−9, 0, 0, 1, 0): (a) bifurcation diagram, and (b) dynamical map.
Figure 2.
Two-parameter bifurcation diagram and dynamical map in the k1–k2 plane for ICs = (10−9, 0, 0, 1, 0): (a) bifurcation diagram, and (b) dynamical map.

Figure 3.
Two-parameter bifurcation diagrams in the k1–k2 plane for two sets of different initial conditions: (a) ICs = (1, 0, 0, 1, 0), and (b) ICs = (0, 1, 0, 1, 0).
Figure 3.
Two-parameter bifurcation diagrams in the k1–k2 plane for two sets of different initial conditions: (a) ICs = (1, 0, 0, 1, 0), and (b) ICs = (0, 1, 0, 1, 0).

Figure 4.
Single-parameter bifurcation diagrams and corresponding LE spectra with respect to different coupling coefficients: (a) k2 = 2.3, k1 ∈ (0.2, 2), and (b) k1 = 1, k2 ∈ (1.8, 2.6).
Figure 4.
Single-parameter bifurcation diagrams and corresponding LE spectra with respect to different coupling coefficients: (a) k2 = 2.3, k1 ∈ (0.2, 2), and (b) k1 = 1, k2 ∈ (1.8, 2.6).

Figure 5.
For the three non-zero roots, the stability distribution in the μ–η plane, where k1 = 1 and k2 = 2.3.
Figure 5.
For the three non-zero roots, the stability distribution in the μ–η plane, where k1 = 1 and k2 = 2.3.

Figure 6.
Local basins of attraction in the μ–η plane for two sets of tiny non-memristor initial conditions IC1 = (x1(0), x2(0), x3(0)): (a) IC1 = (10−9, 0, 0), and (b) IC1 = (−10−9, 0, 0).
Figure 6.
Local basins of attraction in the μ–η plane for two sets of tiny non-memristor initial conditions IC1 = (x1(0), x2(0), x3(0)): (a) IC1 = (10−9, 0, 0), and (b) IC1 = (−10−9, 0, 0).

Figure 7.
Local basins of attraction in the μ–η plane for two sets of large non-memristor initial conditions IC1 = (x1(0), x2(0), x3(0)): (a) IC1 = (1, 0, 0), and (b) IC1 = (0, 1, 0).
Figure 7.
Local basins of attraction in the μ–η plane for two sets of large non-memristor initial conditions IC1 = (x1(0), x2(0), x3(0)): (a) IC1 = (1, 0, 0), and (b) IC1 = (0, 1, 0).

Figure 8.
For fixed IC1 = (10−9, 0, 0), numerically measured phase portraits of the memristor initial condition-induced attractors in the x4–x5 plane with different values of IC2. The top pictures demonstrate the periodic and chaotic attractors with the period-doubling bifurcation scenario, the middle pictures illustrate the chaotic attractors with different structures and positions, and the bottom pictures represent the stable point and unstable period-1 attractors with different positions.
Figure 8.
For fixed IC1 = (10−9, 0, 0), numerically measured phase portraits of the memristor initial condition-induced attractors in the x4–x5 plane with different values of IC2. The top pictures demonstrate the periodic and chaotic attractors with the period-doubling bifurcation scenario, the middle pictures illustrate the chaotic attractors with different structures and positions, and the bottom pictures represent the stable point and unstable period-1 attractors with different positions.

Figure 9.
Analog implementation circuit in a jerk-circuit form for the 5-D TMJ system.

Figure 10.
PSIM simulated phase portraits of the memristor initial condition-induced attractors in the plane of v4 and v5 with fixed IC1 = (v1(0), v2(0), v3(0)) = (1 nV, 0 V, 0 V), and varied IC2 = (v4(0), v5(0)) (unit: V), demonstrating the appearance of the coexisting infinitely many attractors’ behaviors.
Figure 10.
PSIM simulated phase portraits of the memristor initial condition-induced attractors in the plane of v4 and v5 with fixed IC1 = (v1(0), v2(0), v3(0)) = (1 nV, 0 V, 0 V), and varied IC2 = (v4(0), v5(0)) (unit: V), demonstrating the appearance of the coexisting infinitely many attractors’ behaviors.

Figure 11.
The digitally circuit-implemented hardware platform for the 5-D TMJ system and the induced attractor acquired by the digital oscilloscope.
Figure 11.
The digitally circuit-implemented hardware platform for the 5-D TMJ system and the induced attractor acquired by the digital oscilloscope.

Figure 12.
Experimentally acquired phase portraits of the memristor initial condition-induced attractors in the plane of v4 and v5 with fixed IC1 = (v1(0), v2(0), v3(0)) = (1 nV, 0 V, 0 V), and varied IC2 = (v4(0), v5(0))(unit: V).
Figure 12.
Experimentally acquired phase portraits of the memristor initial condition-induced attractors in the plane of v4 and v5 with fixed IC1 = (v1(0), v2(0), v3(0)) = (1 nV, 0 V, 0 V), and varied IC2 = (v4(0), v5(0))(unit: V).


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
For different values of μ and η, the nonzero roots, stabilities, and attractor types.
| μ, η | Nonzero Roots | Stabilities | Attractor Types |
|---|---|---|---|
| −0.7, 1 | 0.7398, −0.7699 ± j2.0261 | USF (1P2N) | Infinite |
| −0.6, 1 | 0.6908, −0.7454 ± j1.9786 | USF (1P2N) | Chaotic attractor |
| −0.5, 1 | 0.6308, −0.7154 ± j1.9236 | USF (1P2N) | Period-2 attractor |
| −0.2, 1 | 0.3495, −0.5747 ± j1.7080 | USF (1P2N) | Point |
| 0, 0 | 0, −0.400 ± j1.5297 | SNF (0P3N) | Point |
| 0.2, 0 | −0.4836, −0.1582 ± j1.5238 | SNF (0P3N) | Point |
| 0.36312, 0 | −0.8002, ±j1.5812 | HB point | Point |
| 0.4, 0 | −0.8571, 0.0286 ± j1.5963 | USF (2P1N) | Period-1 attractor |
| 0.9, 0 | −1.3043, 0.2522 ± j1.7590 | USF (2P1N) | Period-4 attractor |
| 1, 0 | −1.3503, 0.2752 ± j1.7797 | USF (2P1N) | Chaotic attractor |
| 1.25, 0 | −1.4323, 0.3161 ± j1.8181 | USF (2P1N) | Infinite |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Bao, H.; Ding, R.; Hua, M.; Wu, H.; Chen, B. Initial-Condition Effects on a Two-Memristor-Based Jerk System. Mathematics 2022, 10, 411. https://doi.org/10.3390/math10030411
AMA Style
Bao H, Ding R, Hua M, Wu H, Chen B. Initial-Condition Effects on a Two-Memristor-Based Jerk System. Mathematics. 2022; 10(3):411. https://doi.org/10.3390/math10030411
Chicago/Turabian StyleBao, Han, Ruoyu Ding, Mengjie Hua, Huagan Wu, and Bei Chen. 2022. "Initial-Condition Effects on a Two-Memristor-Based Jerk System" Mathematics 10, no. 3: 411. https://doi.org/10.3390/math10030411
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.