4.1. Experiments with Simulated Signals
In order to evaluate and compare the performance of the proposed method and the other signal processed methods, the evaluation indexes were set as signal-to-noise ratio (SNR) and the root mean square error (RMSE).
where
is the original signal,
is the denoised signal and
N is the length of the signal.
In engineering, the SNR of the lidar signal that needs to be processed often has a large dynamic range, and single denoising methods do not have good performance for the whole echo profile. So we plan to divide the signal to be processed into two parts according to the SNR and explore which method is more suitable in the case of integration time of 1200 s. The denoising performance of different algorithms, namely, moving averages (MA), wavelet hard thresholding (WTH), wavelet soft thresholding (WTS), EMD combined with DFA (EMD), EEMD combined with DFA (EEMD) and VMD combined with whale optimization algorithm (VMD-WOA) were compared for different evaluation indexes. As shown as
Table 2, the WT method could achieve better results when dealing with high SNR signal, while the decomposition algorithm had good performance when processing low SNR signal.
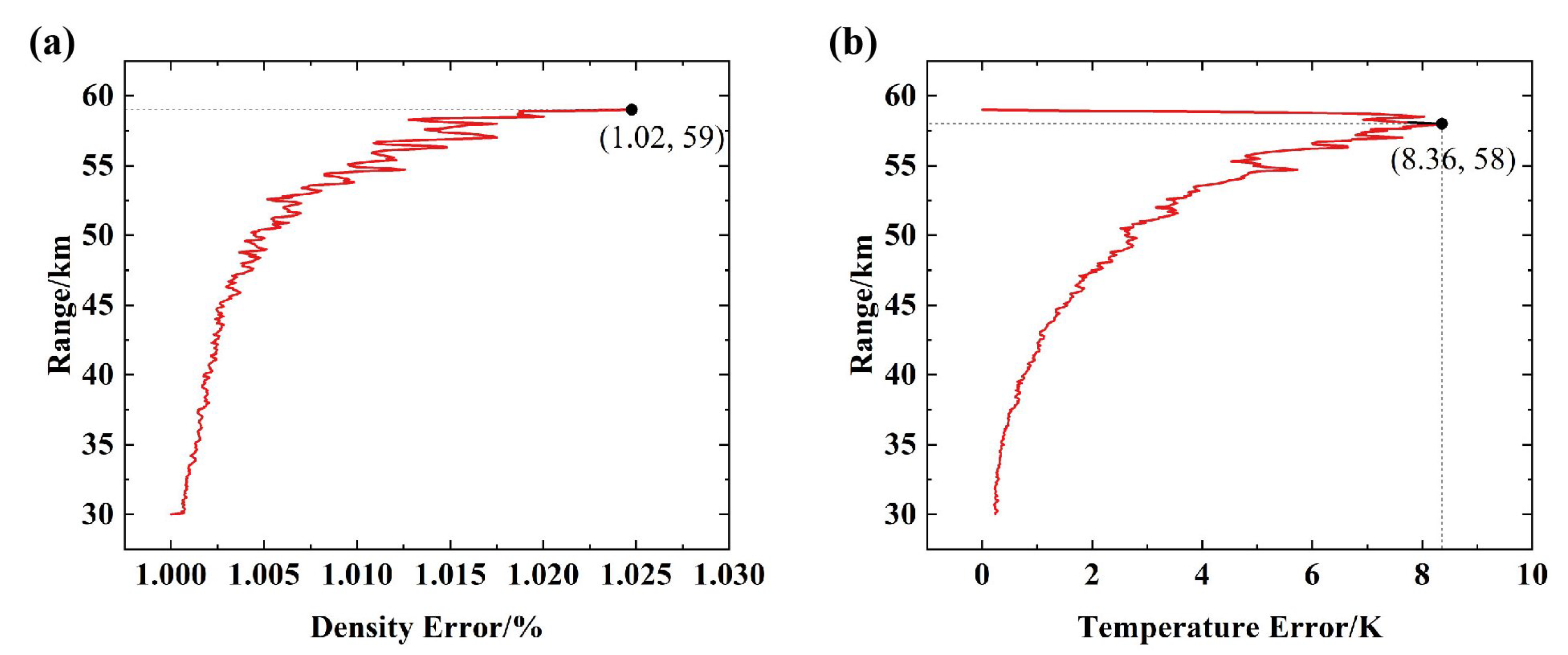
In order to make the algorithm as simple and efficient as possible on the basis of the above conclusions, we continued to explore the maximum height range that the WTS method can effectively denoise under the condition that the absolute error of density retrieval was less than 5% and the absolute error of temperature retrieval was less than ±10 K by the CH method [
25]. The following paragraphs were also calculated under this condition. Here, the WT method used the “
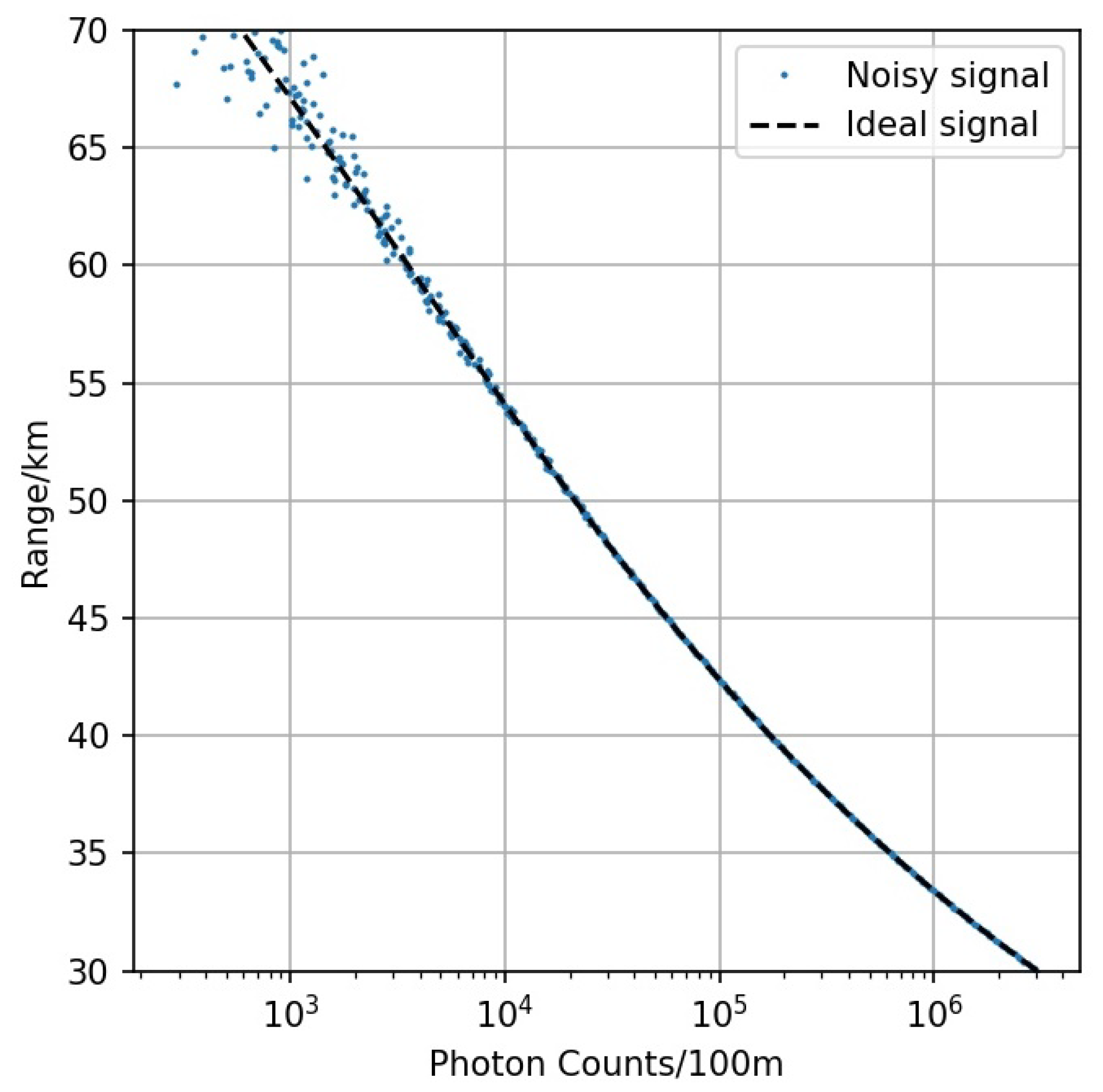
” wavelet basis and had three decomposition layers. Since the lidar echo signal obey Poisson distribution so that the signal are random, the mean value of the absolute errors of 100 profiles determined denoising performance of the following paragraphs. As shown in
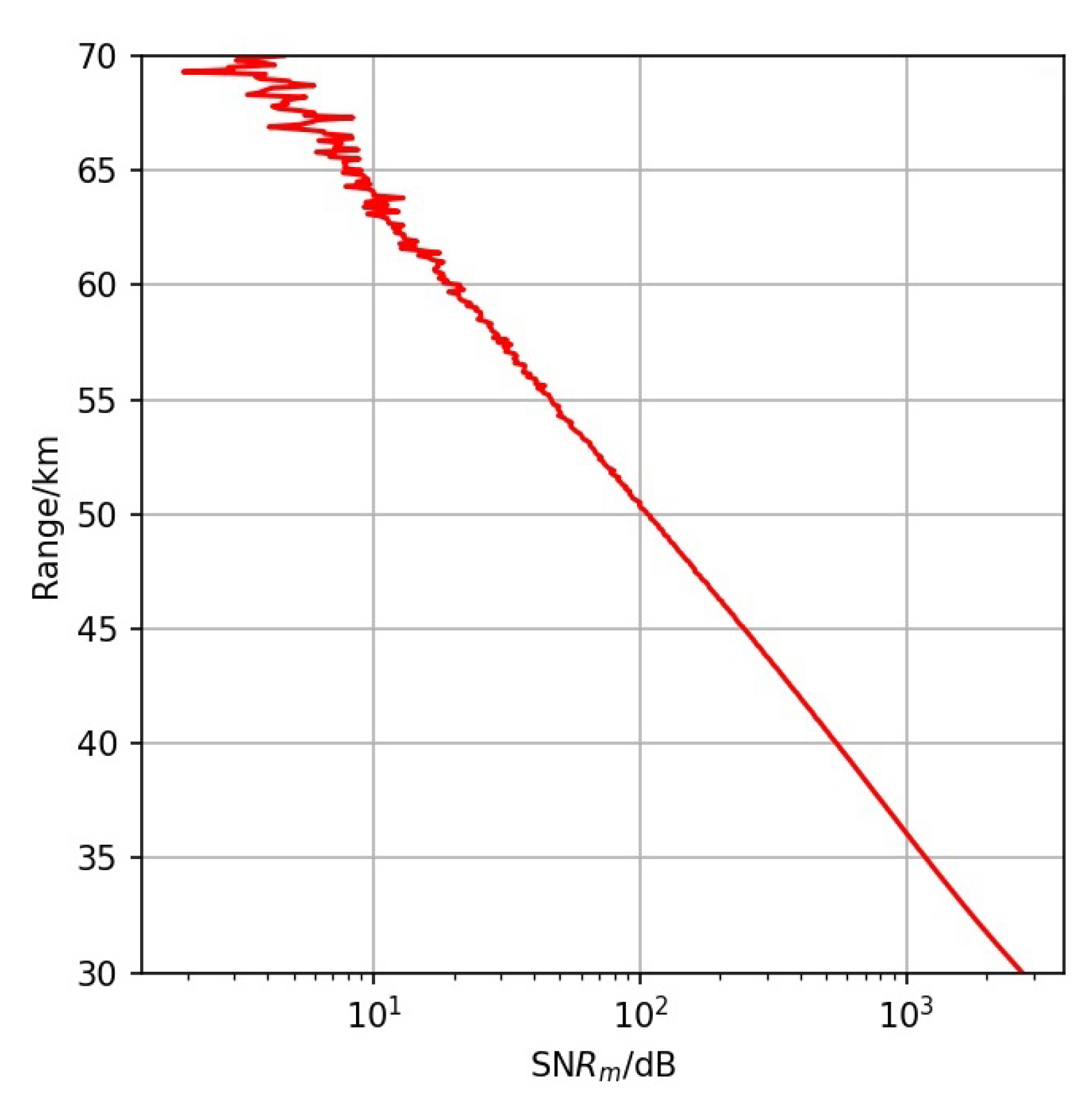
Figure 4, when the maximum detection range was 59 km and the
of the echo signal was generally above 16 dB, the WTS method could obtain valid data with the maximum absolute error of density retrieval of 1.02% and the maximum absolute error of temperature retrieval of 8.36 K.
It should be noted that the calculation of the SNR here is different from the previous one, due to the ideal signal not being able to be acquired in actual measurement. Considering the statistical properties of the detector, the SNR under Poisson distribution is defined as the ratio of the target backscatter echo signal to the square root of the original echo signal, where the original echo signal includes the target backscatter echo signal and the background noise. Usually, after a certain distance, the background counts of the lidar do not change with height, then it is considered that the photon counts collected by lidar is only the background noise. Thus, the average value of the photon counts after the certain distance can be taken as the background noise. The expression of
is as follows:
where
is the original echo signal and
is the background noise.
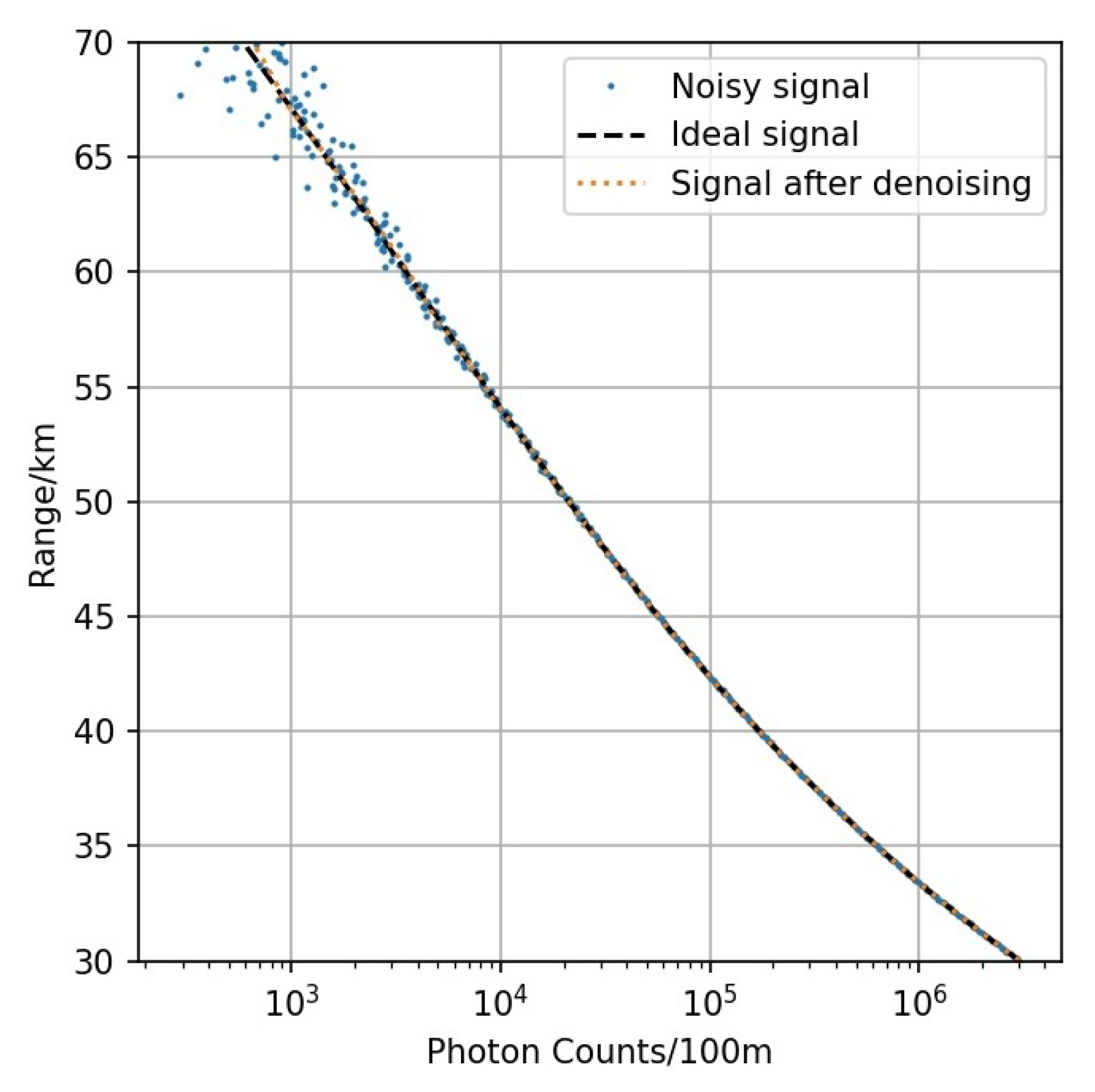
Figure 5 shows the change
with height.
Taking the simulated signal with the
below 16 dB in
Section 2 as an example, the DFA method was used to calculate the scaling exponent
of of each IMF for verification, and the results are given in
Table 3. Here, the length of non-overlapping windows was an eighth of the length of the input signal. The scaling exponent of
were all less than 0.5, so they were considered as noise; The scaling exponent of
were all higher than 0.5, so they were considered as signal.
For the purpose of validating the accuracy of the DFA method in distinguishing whether noise or signal was the main component of the IMFs, it was accumulated layer-by-layer from
to
. Meanwhile, SNR and RMSE were calculated, respectively. Comparing the original signal with the accumulated signal shown in
Table 4, it was found that the accumulated signal of 4–6 layer IMFs was the closest to the original signal with the largest SNR and the smallest RMSE. This result is consistent with the results in
Table 3, proving that the DFA method could be used as a reliable algorithm for qualification between noise and signal.
To explore which decomposition algorithm was more suitable for low
signal, the EMD, EEMD, CEEMDAN, and VMD-WOA algorithms were selected for comparison. In the experiments with simulated signal, it was found that since the echo signals obey Poisson distribution and have a certain randomness, there was no method that always had the best denoising performance, which was also related to the selected SNR threshold. So as to solve this problem and find a generally suitable denoising method, the average SNR (
) was used as the evaluation index to determine the denoising performance on the basis of multiple profiles. When selecting the signal with
below 16 dB, after 100 statistics, the EEMD algorithm showed the best performance in 55 of them, and ranked first with 28.56 dB as shown in
Table 5. For EEMD, the standard deviation of Gaussian white noise was 0.1, and Gaussian white noise was added 50 times.
Based on the above findings, we proposed to combine EEMD and LOWESS to achieve better denoising performance.
Table 6 shows that the proposed EEMD-LOWESS outperformed all the other proposed methods [
26] which could retain more effective signal. In addition, it was found that it was more effective at removing noise in low-frequency IMFs than extracting signal in high-frequency IMFs.
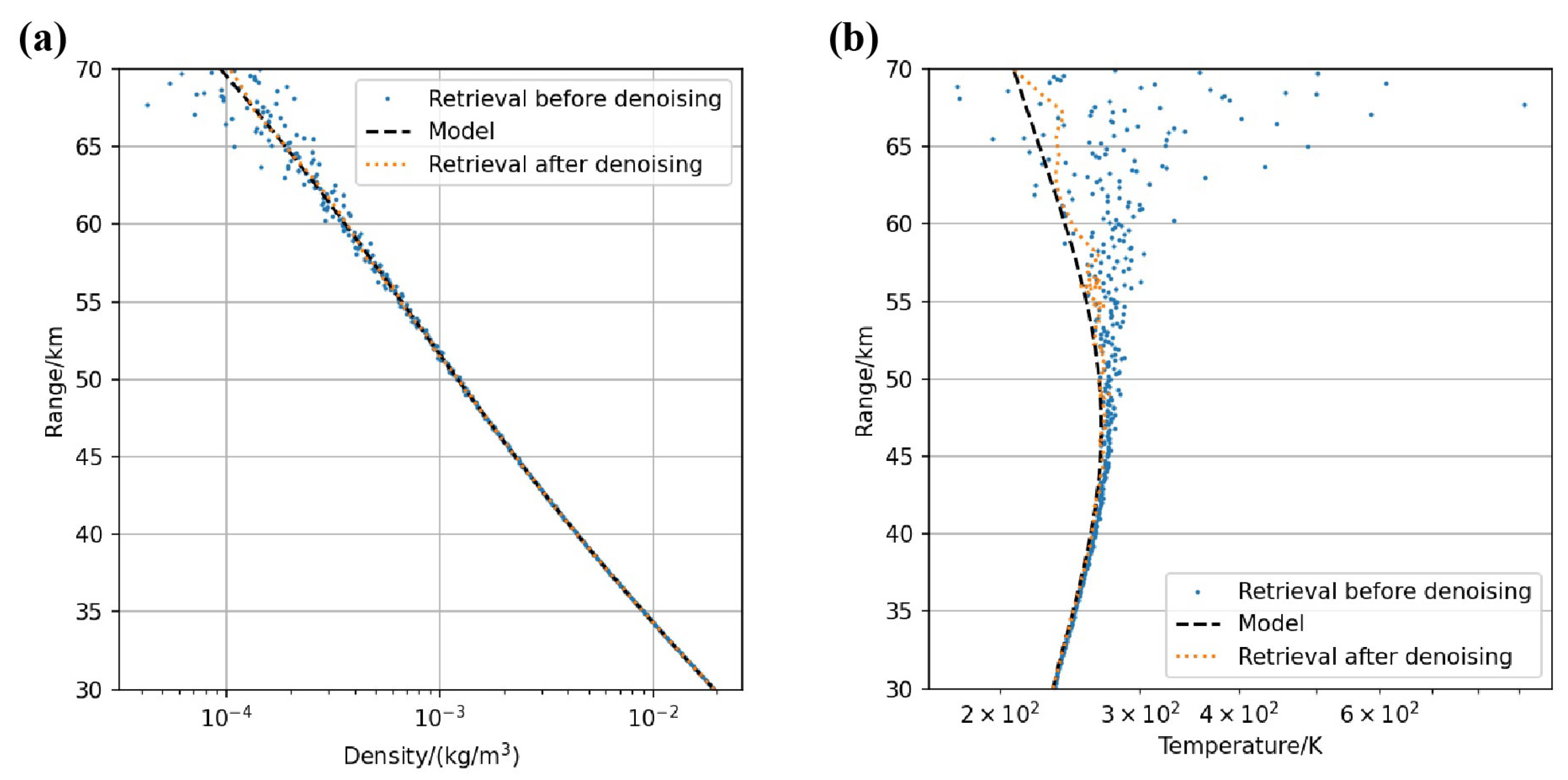
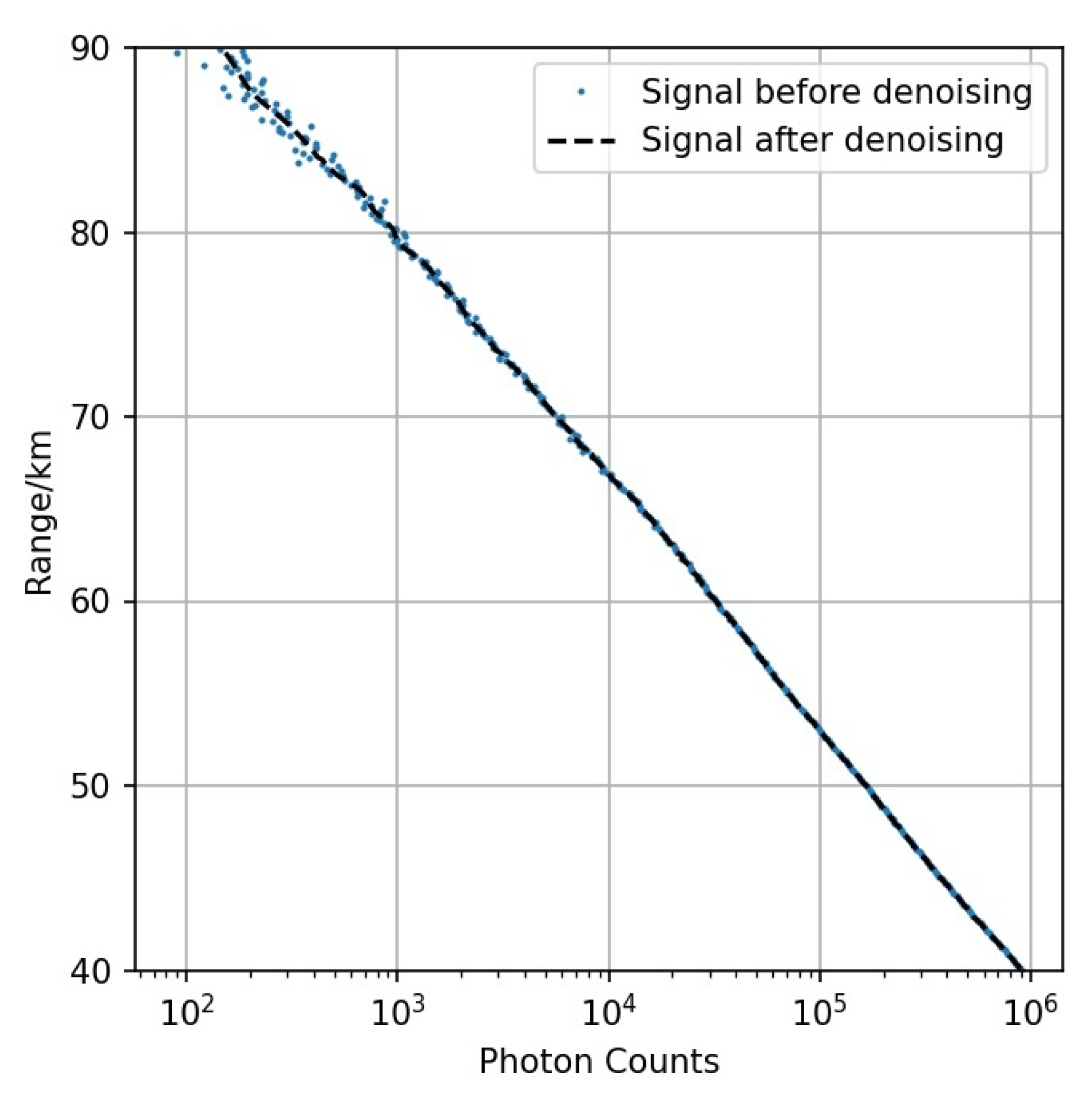
The denoising performance of the WT-EEMD-LOWESS algorithm is shown in
Figure 6. The echo signals after denoising were smoother, more stable and closer to the ideal signal. The denoised data obtained through the above process were used as the input data of the CH method, and the density and temperature retrieval of the simulated signal could be gained, as presented in
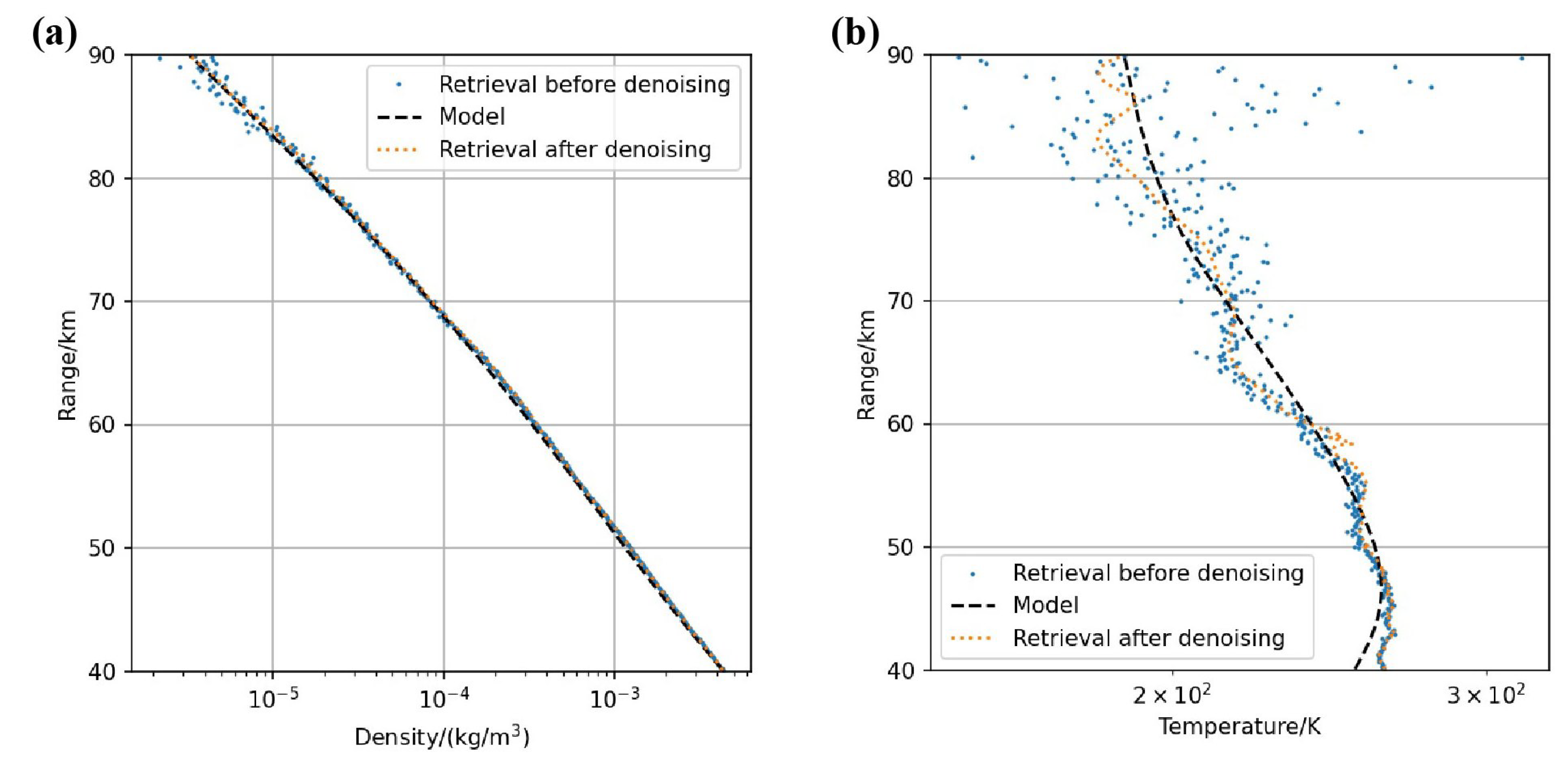
Figure 7a,b and then in contrast with the model temperature, the reliability of the proposed algorithm could be evaluated. It was not practical to calculate the absolute value of density due to several parameters fluctuating with measurement, so the relative density was calculated instead. As shown in
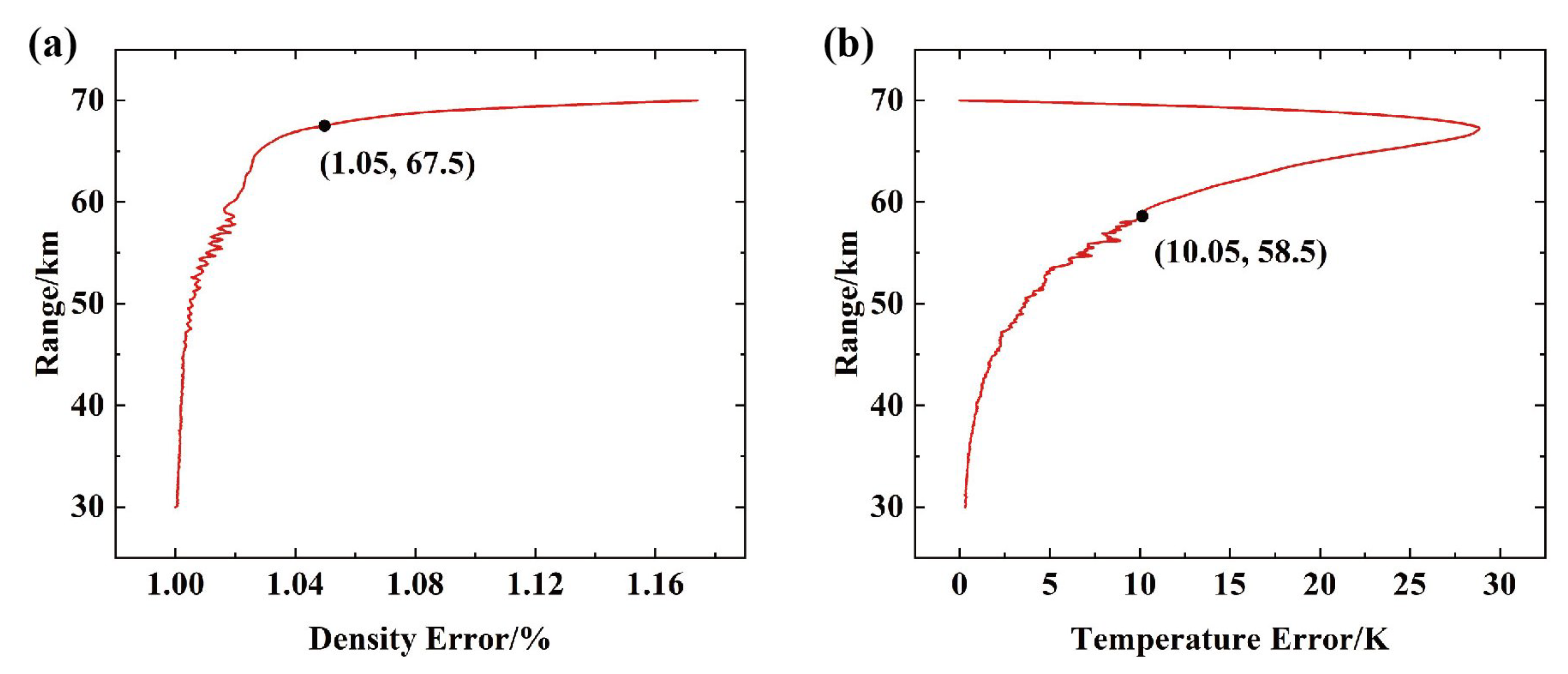
Figure 8, under the condition that the error of density and temperature retrieval does not exceed 5% and 10 K, the maximum detection range was 67.5 km and 58.4 km after denoising, which were 12.8 km and 11.1 km higher than those without denoising, respectively.
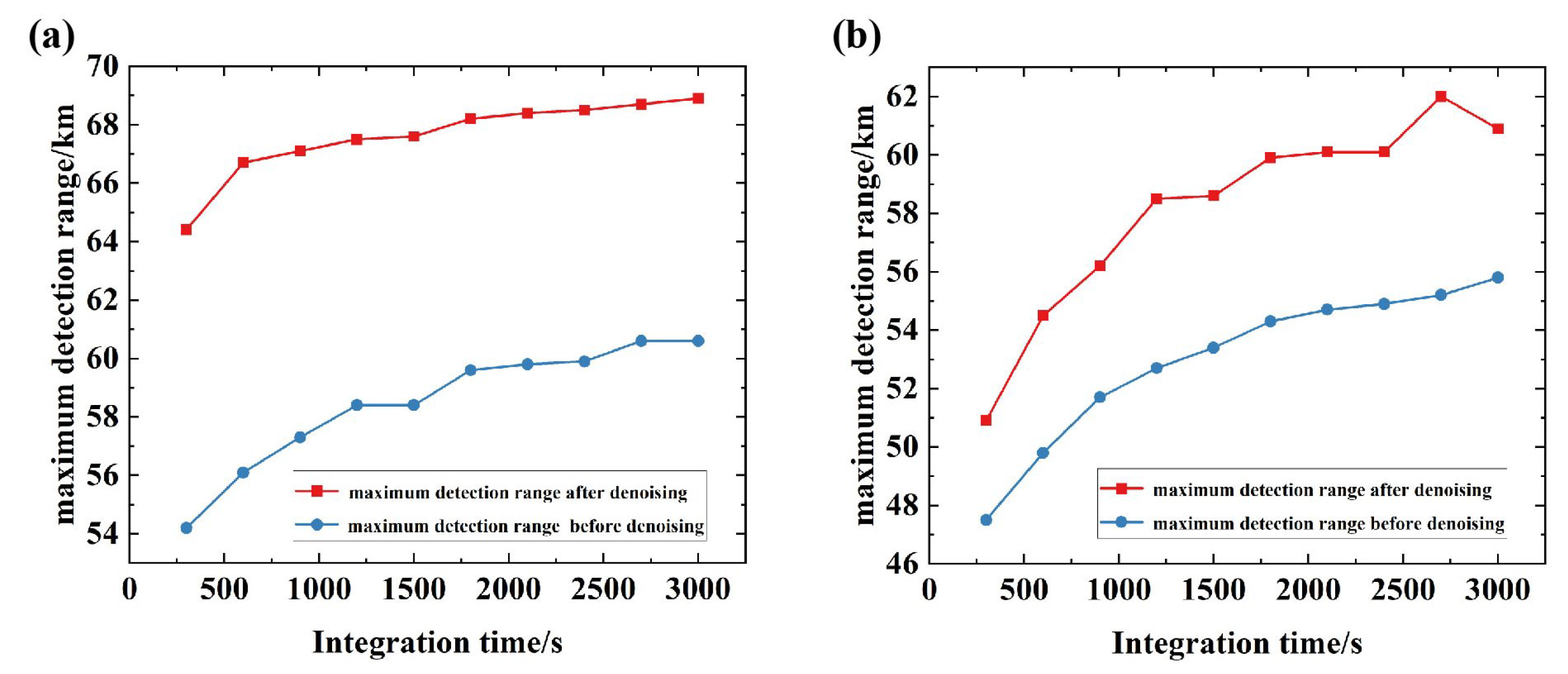
Futhermore, the algorithm was applied to simulated the lidar echo signal with integration times of 300–3000 s. The variation of the maximum detection range with the integration time is shown in
Figure 9. It could be found that the maximum detection range increased with the accumulation of the integration time, which was conformed to the law. When the error of density retrieval was less than
, the maximum detection range increased first fast and then slowly with the integration time. The reason is that when the integration time was too long, the detection range was close to the limit of 70 km. The maximum detection range changed slowly with the integration time at 60 km when the error of temperature retrievals was less than 10 K. The reason is that the measurement was inaccurate within 10 km below the seed temperature, which is an inherent shortcoming of the CH method.


 ,
, 











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}