
Development of a Cost-Effective Airborne Remote Sensing System for Coastal Monitoring

 ,
,
Abstract
:1. Introduction
2. Configuration of the Airborne Remote Sensing Sensors
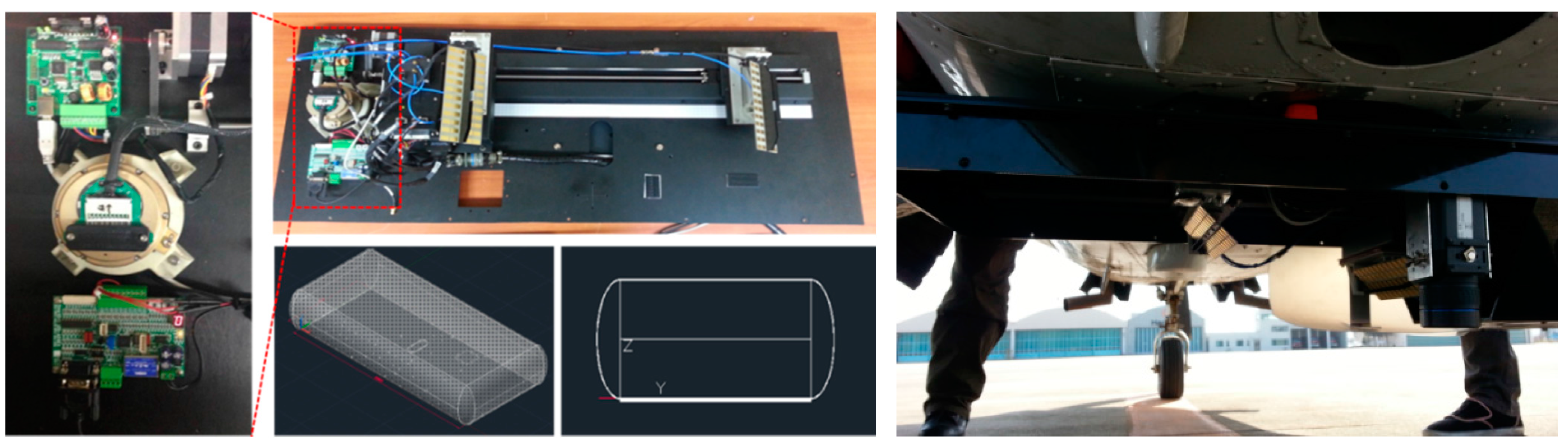
2.1. Synthetic Aperture Radar (SAR)


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Frequency | X-band (10.25 GHz) |
| Bandwidth | 500 MHz |
| Range resolution | 0.3, 0.5, 1, 2 m |
| Swath width | 300 m–4 km |
| Operating mode | StripMap, (Spotlight) |
| Supply voltage | 12–18 V |
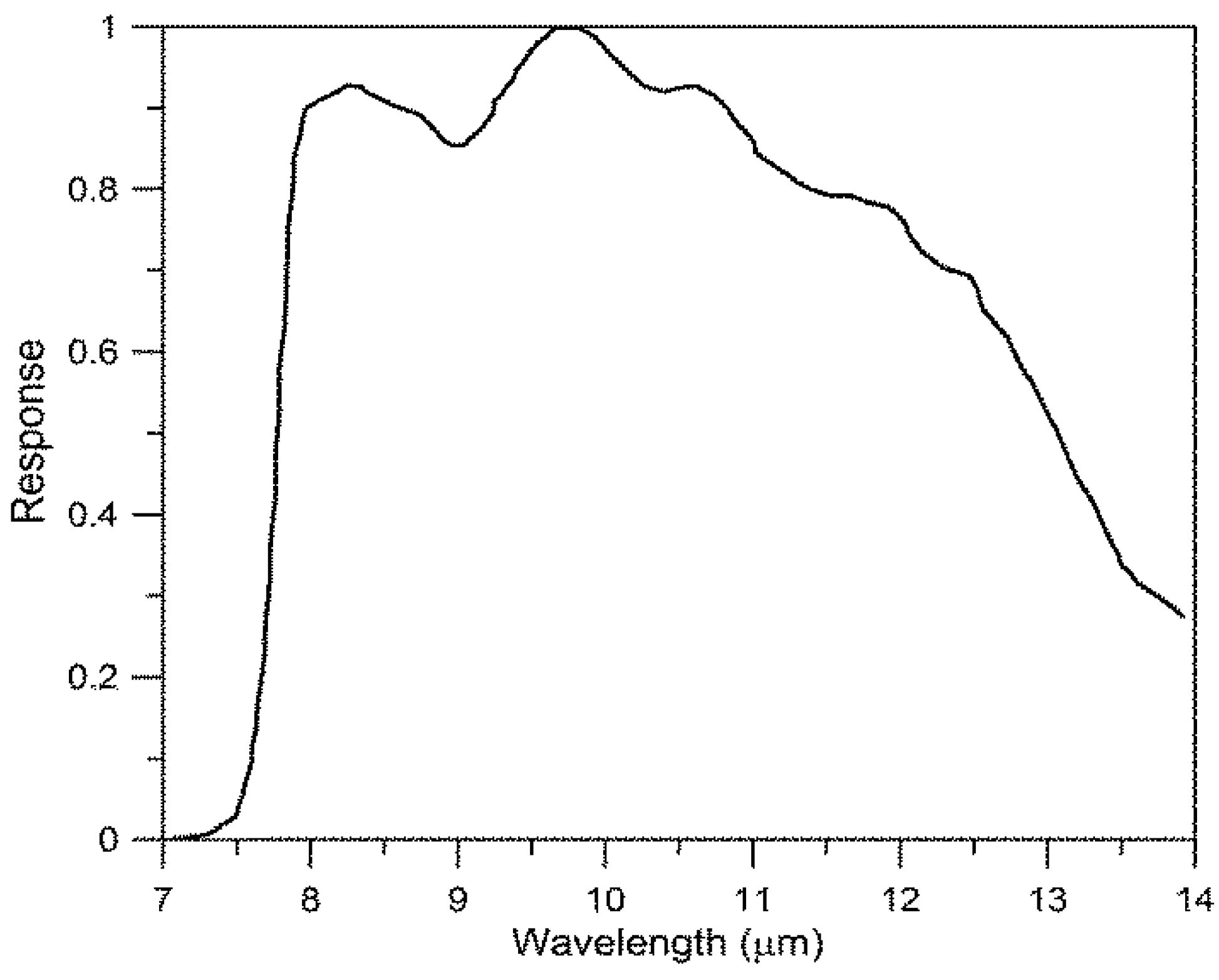
2.2. Thermal Infrared (TIR)
| Parameter | Value |
|---|---|
| Field of view (FOV) | 45° × 34° (55° diagonal) |
| Spatial resolution (IFOV) | 1.23 mrad |
| Spectral range | 7.5–13 μm |
| Focal length | 13.1 mm |
| Thermal sensitivity | <0.05 °C at 30 °C |
| IR resolution | 640 × 480 pixels |
2.3. Configuration of Remote Sensing Sensors on Aircraft
3. Calibration of Airborne Sensors
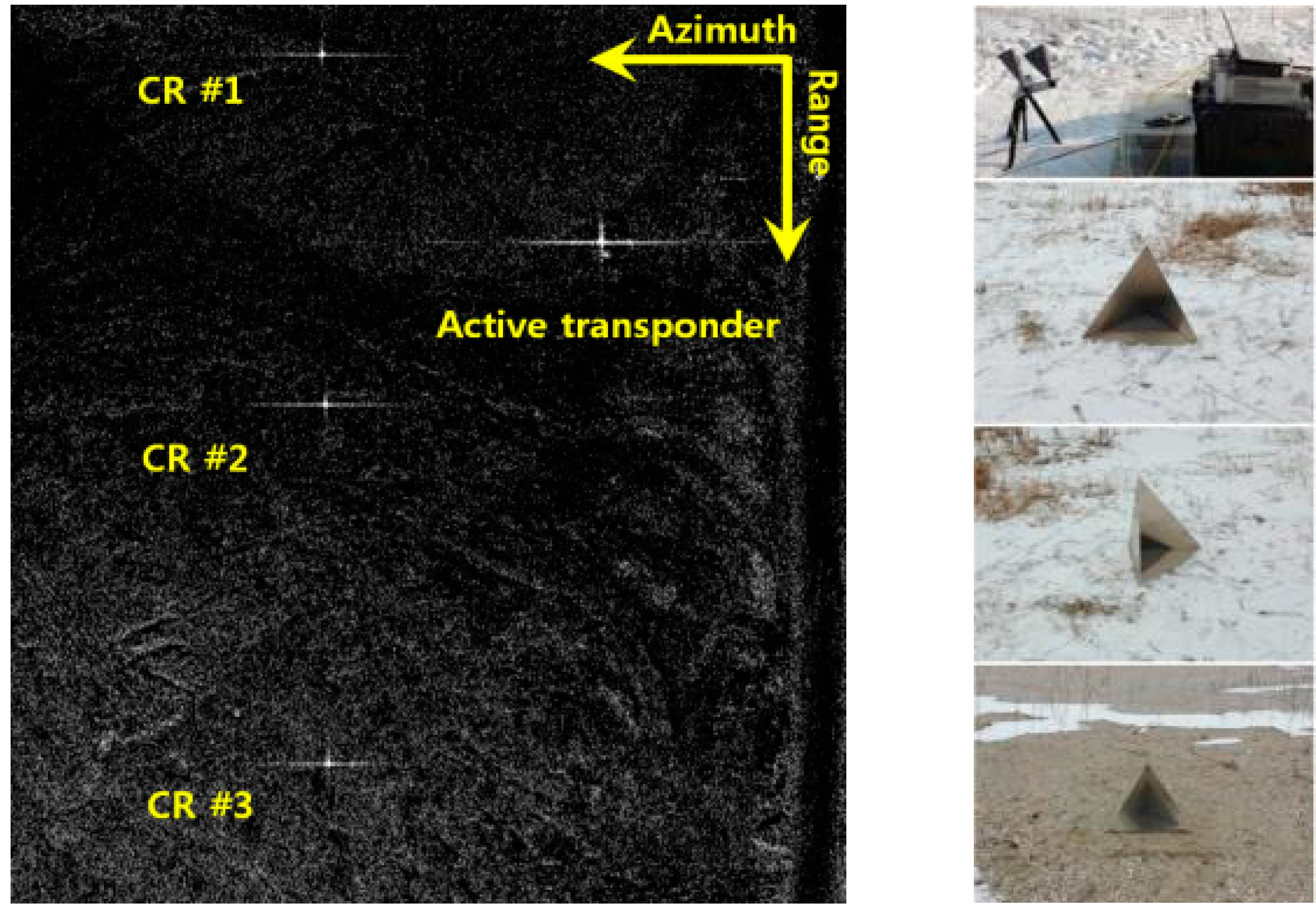
3.1. Radiometric and Interferometric Calibration of SAR Sensor


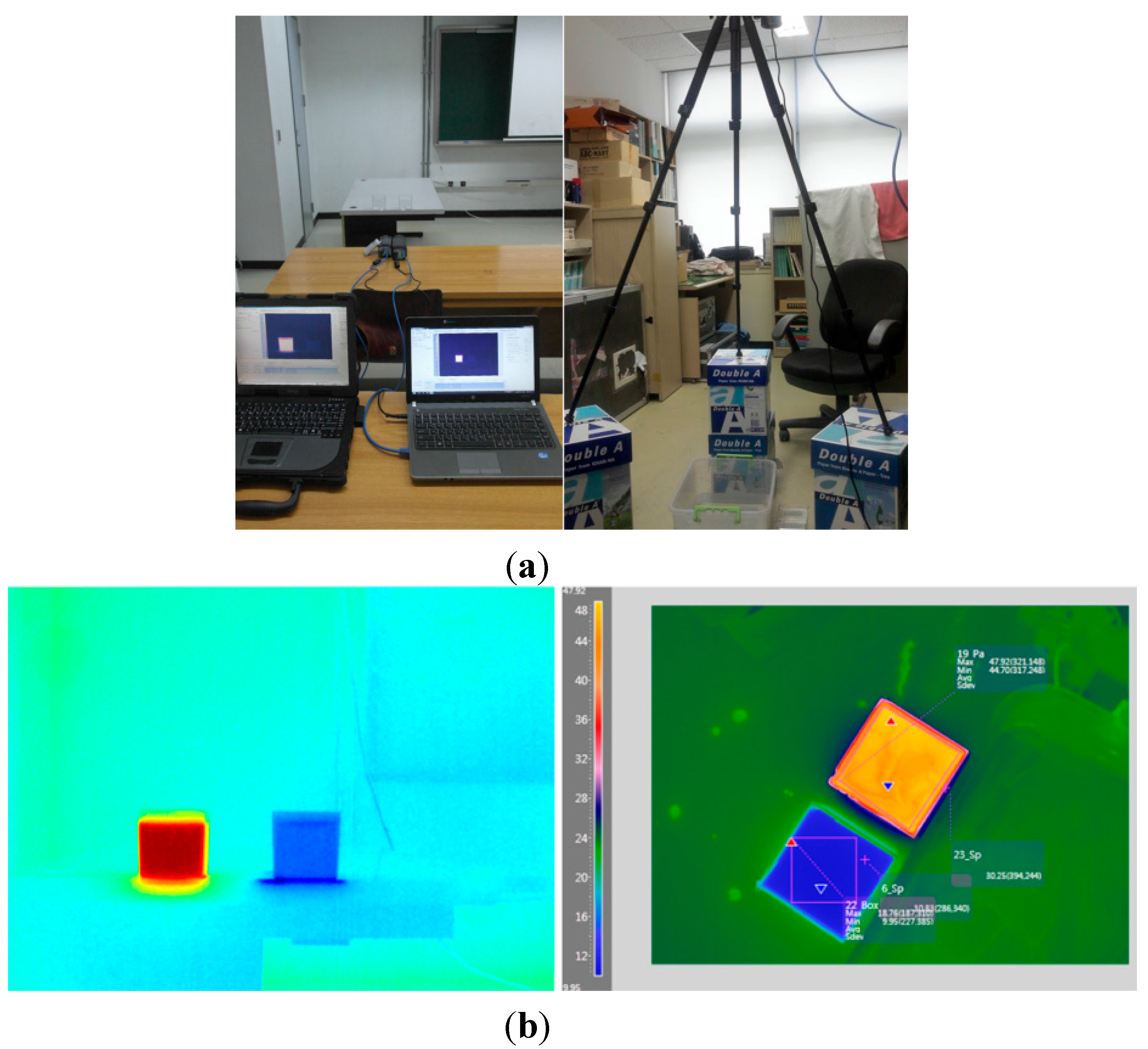
3.2. Radiometric and Geometric Calibration of TIR Sensor



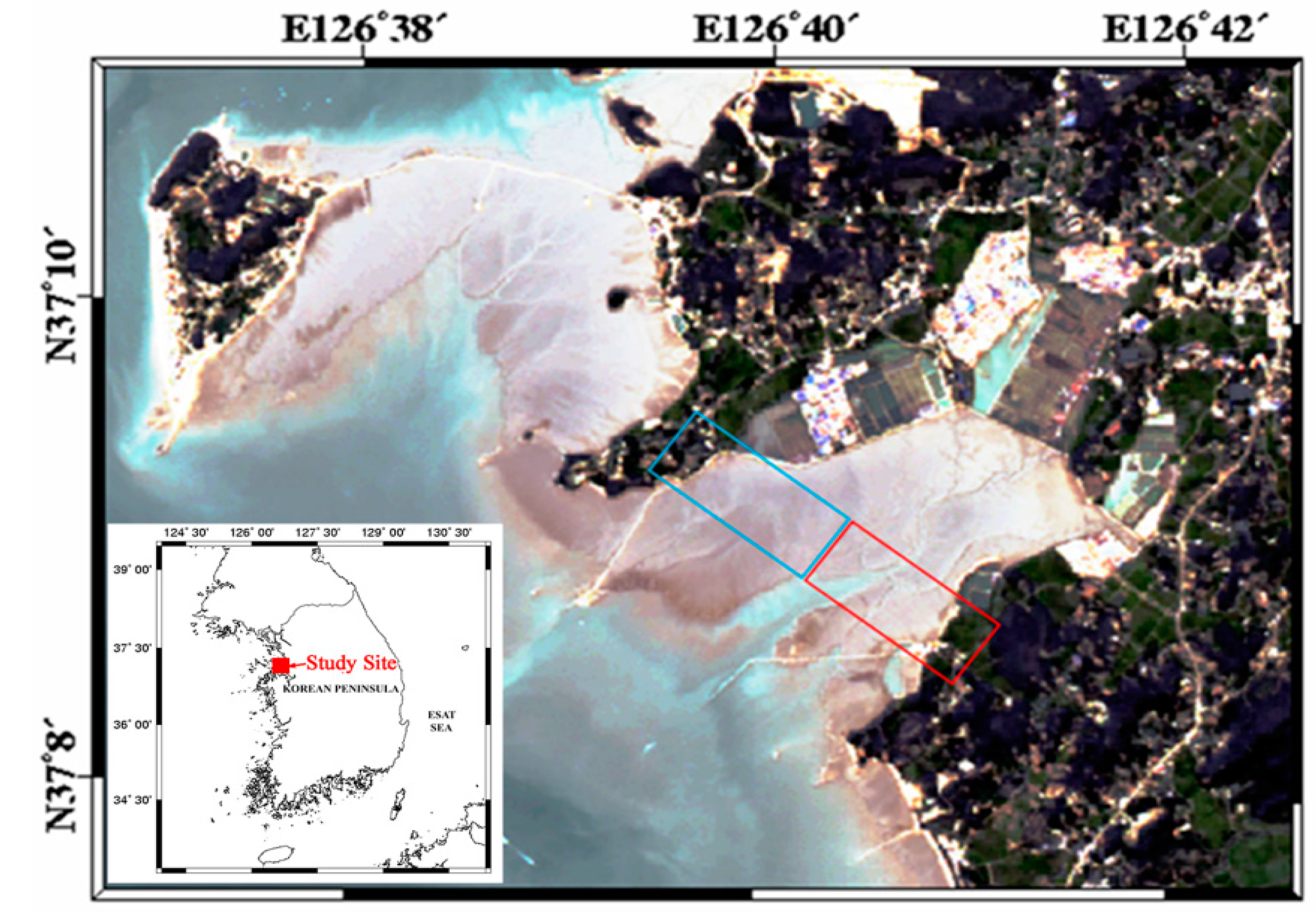
4. Coastal Monitoring Using the Airborne Sensors
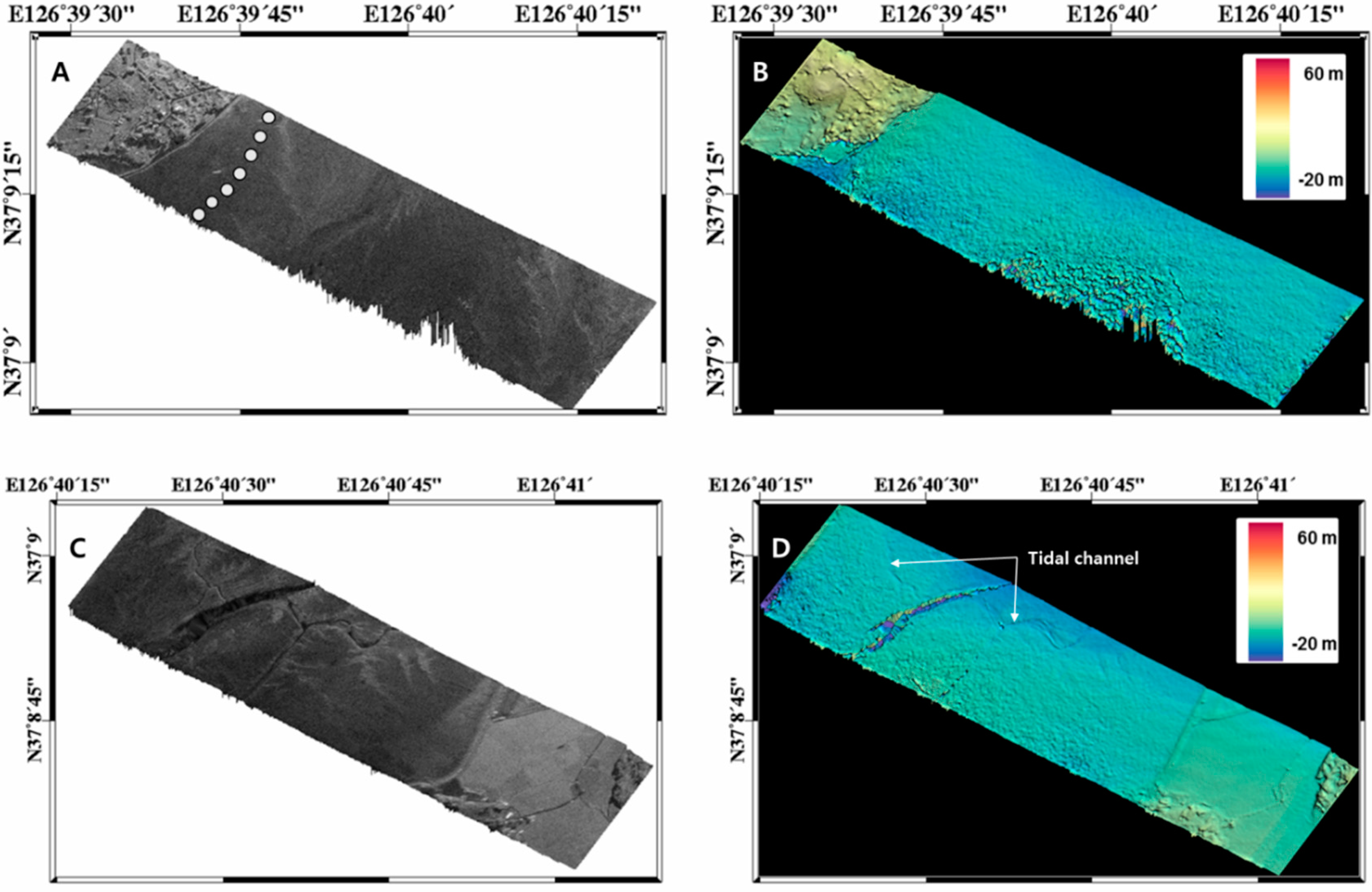
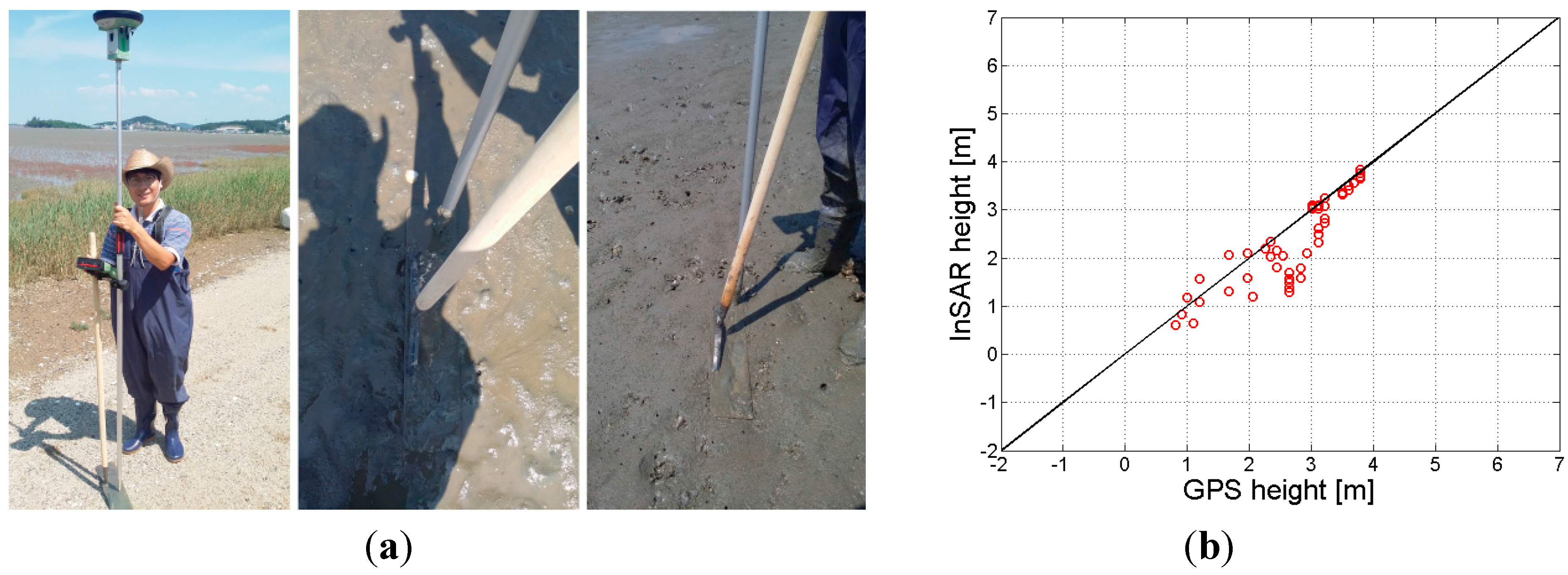
4.1. Generation of Intertidal Flat DEM
| Parameter | Value (XTI) | Value (ATI) |
|---|---|---|
| Acquisition date | 25 June 2013 | 17 September 2014 |
| Pulse repetition frequency (PRF) | 1000 Hz | 1000 Hz |
| Baseline length | 35.1 cm | 37.8 cm |
| Baseline orientation angle | 120° | - |
| Altitude | 600 m | 457 m |
| Velocity | 41.62 m/s | 45.99 m/s |
| Look angle (near/far) | 30°/53° | 17°/54° |
| Slant range (near/far) | 696 m/1018 m | 479 m/801 m |
| Range swath | 322 m | 322 m |
| Range resolution | 0.314 m | 0.314 m |
| Azimuth resolution | 0.1 m | 0.1 m |



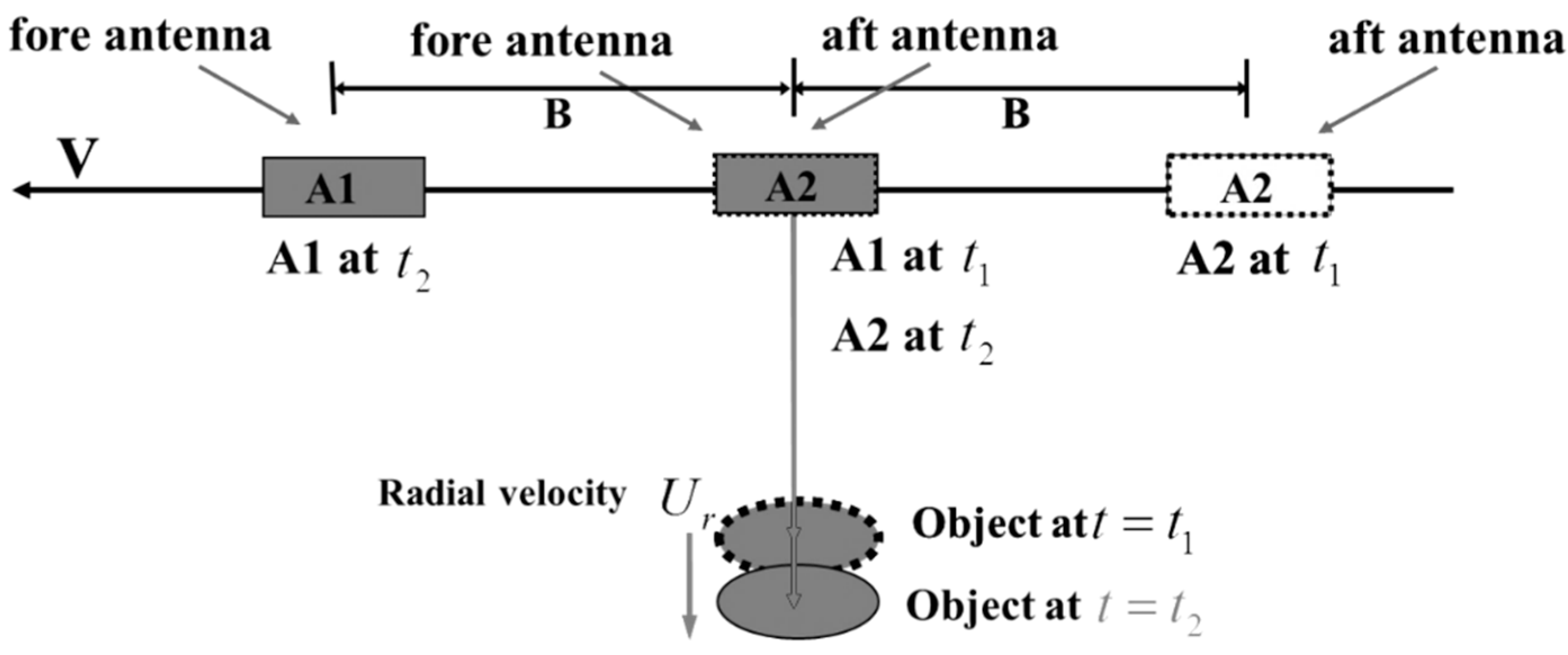
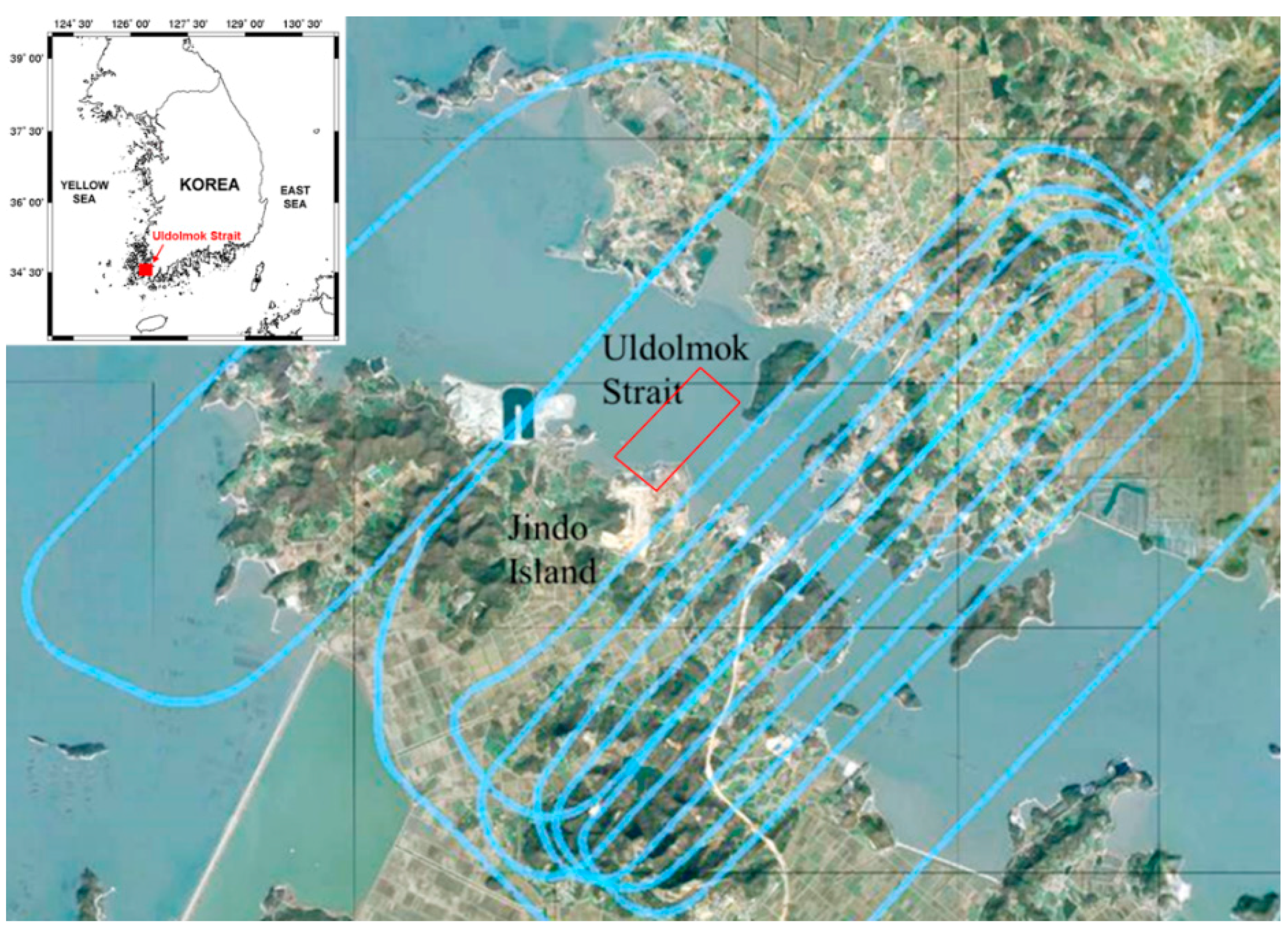
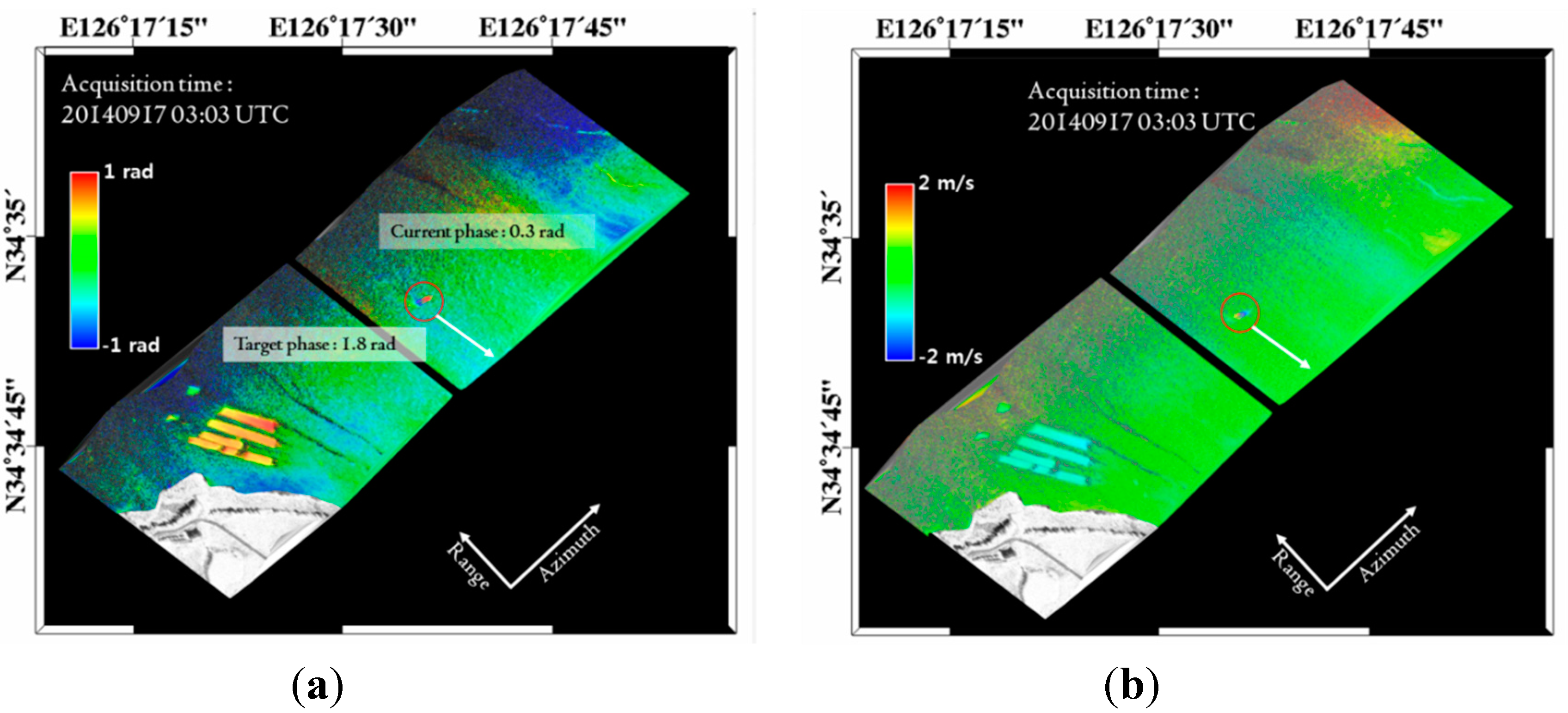
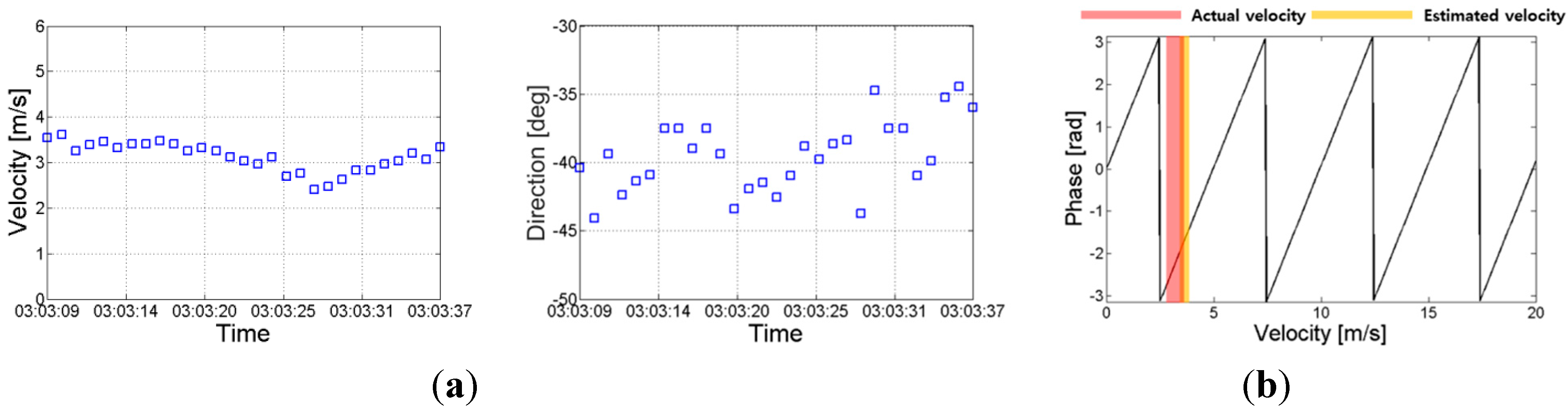
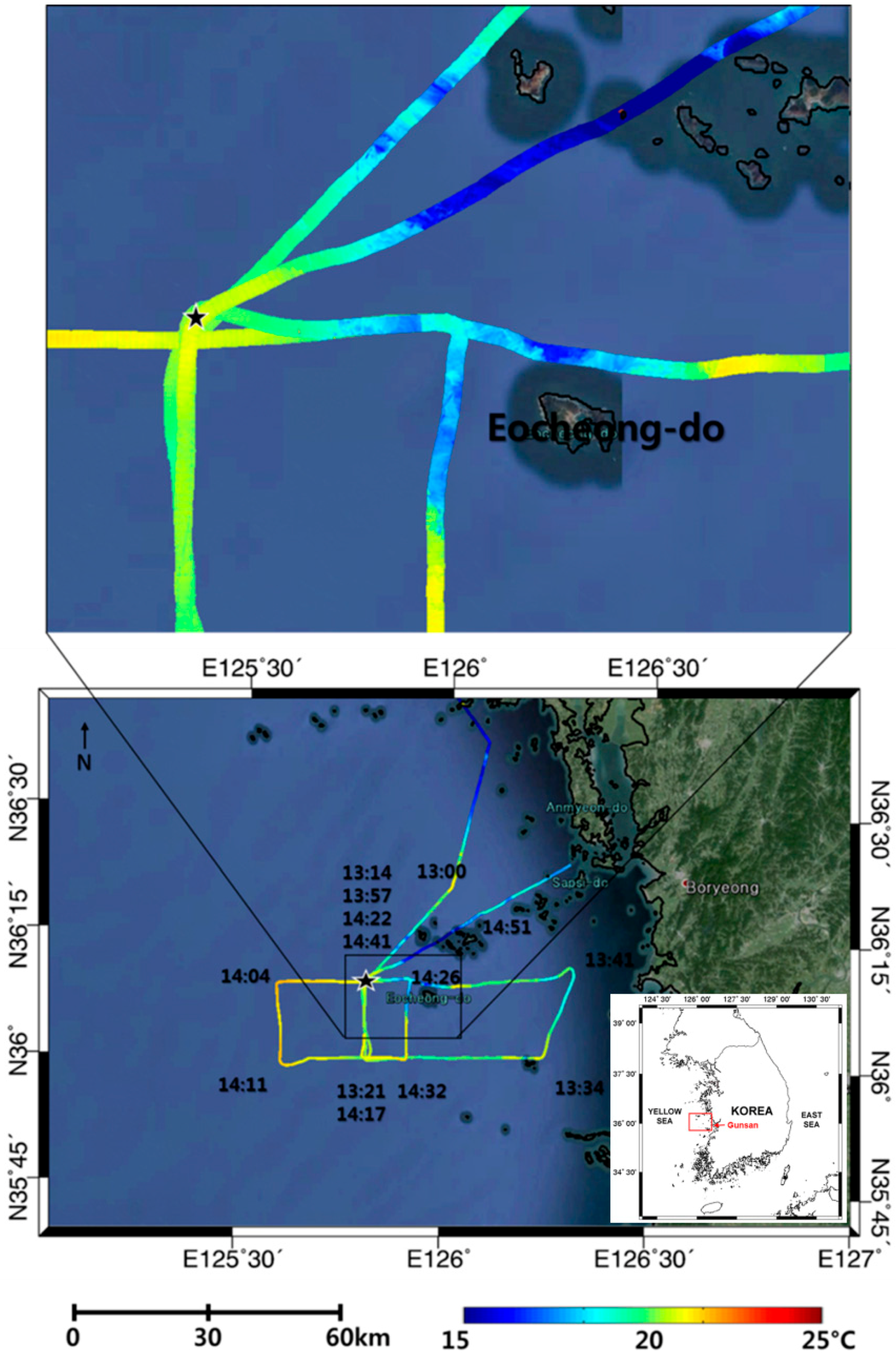
4.2. Measurement of Coastal Surface Current




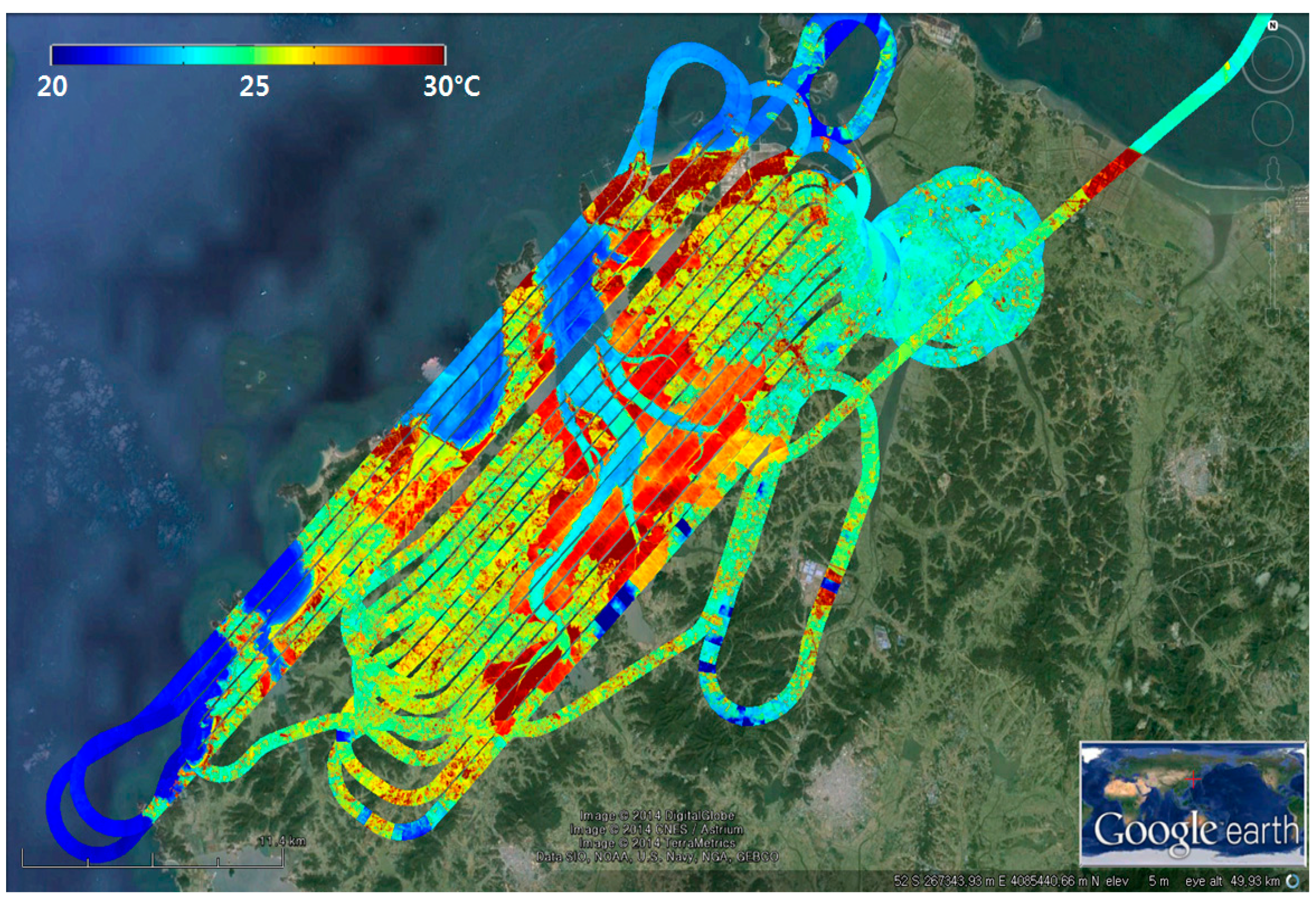
4.3. High-Resolution Sea Surface Temperature in Coastal Area


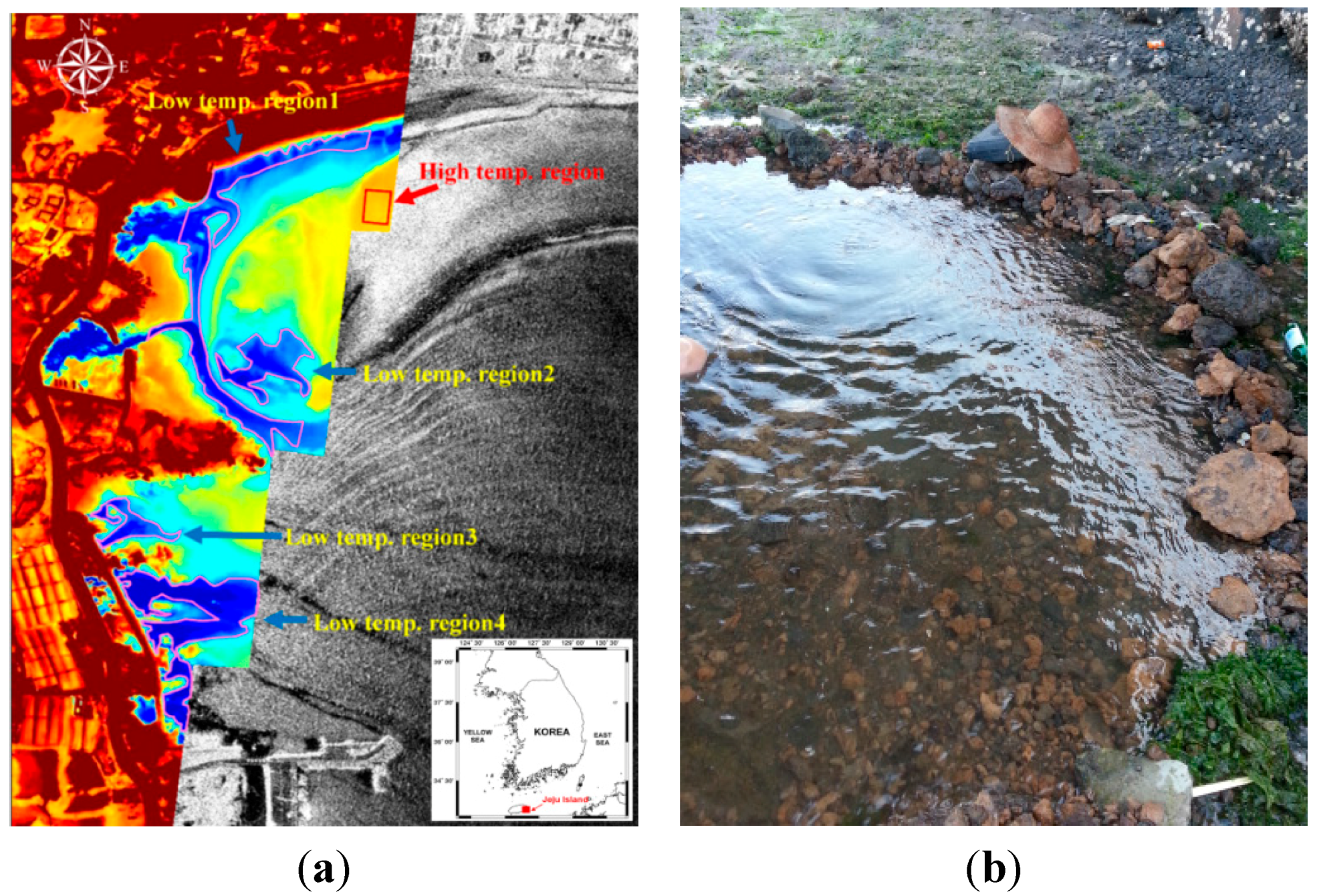
4.4. Monitoring of Submarine Groundwater Discharge (SGD)

5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Kim, D.-J.; Moon, W.M.; Kim, Y.S. Application of TerraSAR-X data for emergent oil-spill monitoring. IEEE Trans. Geosci. Remote Sens. 2010, 48, 852–863. [Google Scholar]
- Kara, A.B.; Wallcraft, A.J.; Hurlburt, H.E. Sea surface temperature sensitivity to water turbidity from simulations of turbid black sea using HYCOM. J. Phys. Oceanogr. 2005, 35, 33–54. [Google Scholar] [CrossRef]
- Fu, L.L.; Holt, B. Seasat views oceans and sea ice with synthetic aperture radar. NASA Tech. Rep. 1982, NASA-CR-168919. 81–120. [Google Scholar]
- Chapin, E.; Hensley, S.; Michel, T.R. Calibration of an across track interferometric P-band SAR. In Proceedings of the 2001 IEEE Geoscience and Remote Sensing Symposium, Sydney, Australia, 9–13 July 2001; pp. 502–204.
- Rosen, P.A.; Hensley, S.; Joughin, I.R.; Li, F.K.; Madsen, S.N.; Rodriguez, E.; Goldstein, R.M. Synthetic aperture radar interferometry. Proc. IEEE. 2000, 88, 333–382. [Google Scholar] [CrossRef]
- Chandrasekhar, S. Radiative Transfer; Dover Publications Inc.: New York, NY, USA, 1960. [Google Scholar]
- Price, J.C. Estimating surface temperatures from satellite thermal infrared data—A simple formulation for the atmospheric effect. Remote Sens. Environ. 1983, 13, 353–361. [Google Scholar] [CrossRef]
- Ricchiazzi, P.; Yang, S.; Gautier, C.; Sowle, D. SBDART: A research and teaching software tool for plane-parallel radiative transfer in the earth’s atmosphere. Bull. Am. Meteorol. Soc. 1998, 79, 2101–2114. [Google Scholar] [CrossRef]
- Kim, D.-J.; Cho, Y.; Kang, K.; Kim, J.; Kim, S. Development of Airborne Remote Sensing System for Monitoring Marine Meteorology (Sea Surface Wind and Temperature). Sea 2013, 18, 32–39. [Google Scholar] [CrossRef]
- Wolf, P.R.; Dewitt, B.A. Elements of Photogrammetry with Applications in GIS, 3th ed.; McGraw-Hill: Boston, MA, USA, 2000. [Google Scholar]
- Hensley, S. A combined methodology for SAR interferometric and stereometric error modeling. In Proceedings of the 2009 IEEE Radar Conference, Pasadena, CA, USA, 4–8 May 2009; pp. 1–6.
- Moore, W.S. The subterranean-estuary: A reaction zone of groundwater and sea water. Mar. Chem. 1999, 65, 111–125. [Google Scholar] [CrossRef]
- Burnett, W.C.; Bokuniewicz, H.; Huettel, M.; Moore, W.S.; Taniguchi, M. Groundwater and pore water inputs to the coastal zone. Biogeochemistry 2003, 66, 3–33. [Google Scholar] [CrossRef]
- D’Elia, C.F.; Webb, K.L.; Porter, J.W. Nitrate-rich groundwater inputs to Discovery Bay, Jamaica: A significant source of N to local coral reefs? Bull. Mar. Sci. 1981, 31, 903–910. [Google Scholar]
- Valiela, I.; Costa, J.; Foreman, K.; Teal, J.M.; Howes, B.L.; Aubrey, D.G. Transport of groundwater-borne nutrients from watersheds and their effects on coastal waters. Biogeochemistry 1990, 10, 177–197. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, D.-j.; Jung, J.; Kang, K.-m.; Kim, S.H.; Xu, Z.; Hensley, S.; Swan, A.; Duersch, M. Development of a Cost-Effective Airborne Remote Sensing System for Coastal Monitoring. Sensors 2015, 15, 25366-25384. https://doi.org/10.3390/s151025366
Kim D-j, Jung J, Kang K-m, Kim SH, Xu Z, Hensley S, Swan A, Duersch M. Development of a Cost-Effective Airborne Remote Sensing System for Coastal Monitoring. Sensors. 2015; 15(10):25366-25384. https://doi.org/10.3390/s151025366
Chicago/Turabian StyleKim, Duk-jin, Jungkyo Jung, Ki-mook Kang, Seung Hee Kim, Zhen Xu, Scott Hensley, Aaron Swan, and Michael Duersch. 2015. "Development of a Cost-Effective Airborne Remote Sensing System for Coastal Monitoring" Sensors 15, no. 10: 25366-25384. https://doi.org/10.3390/s151025366