Polypyrrole/Agarose Hydrogel-Based Bladder Volume Sensor with a Resistor Ladder Structure

 ,
,
Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Materials and Methods
2.1. Fabrication of Proof-Of-Concept Devices
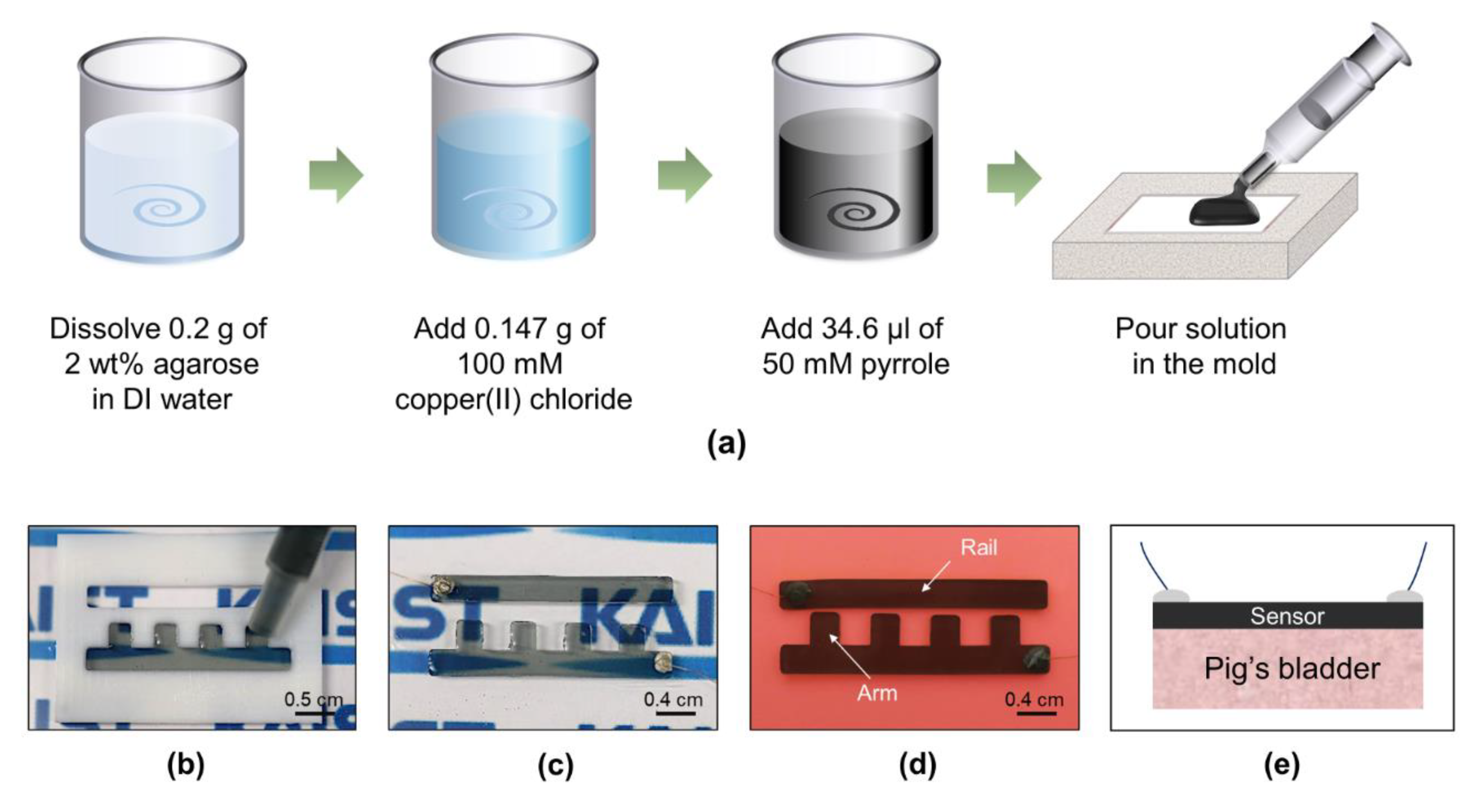
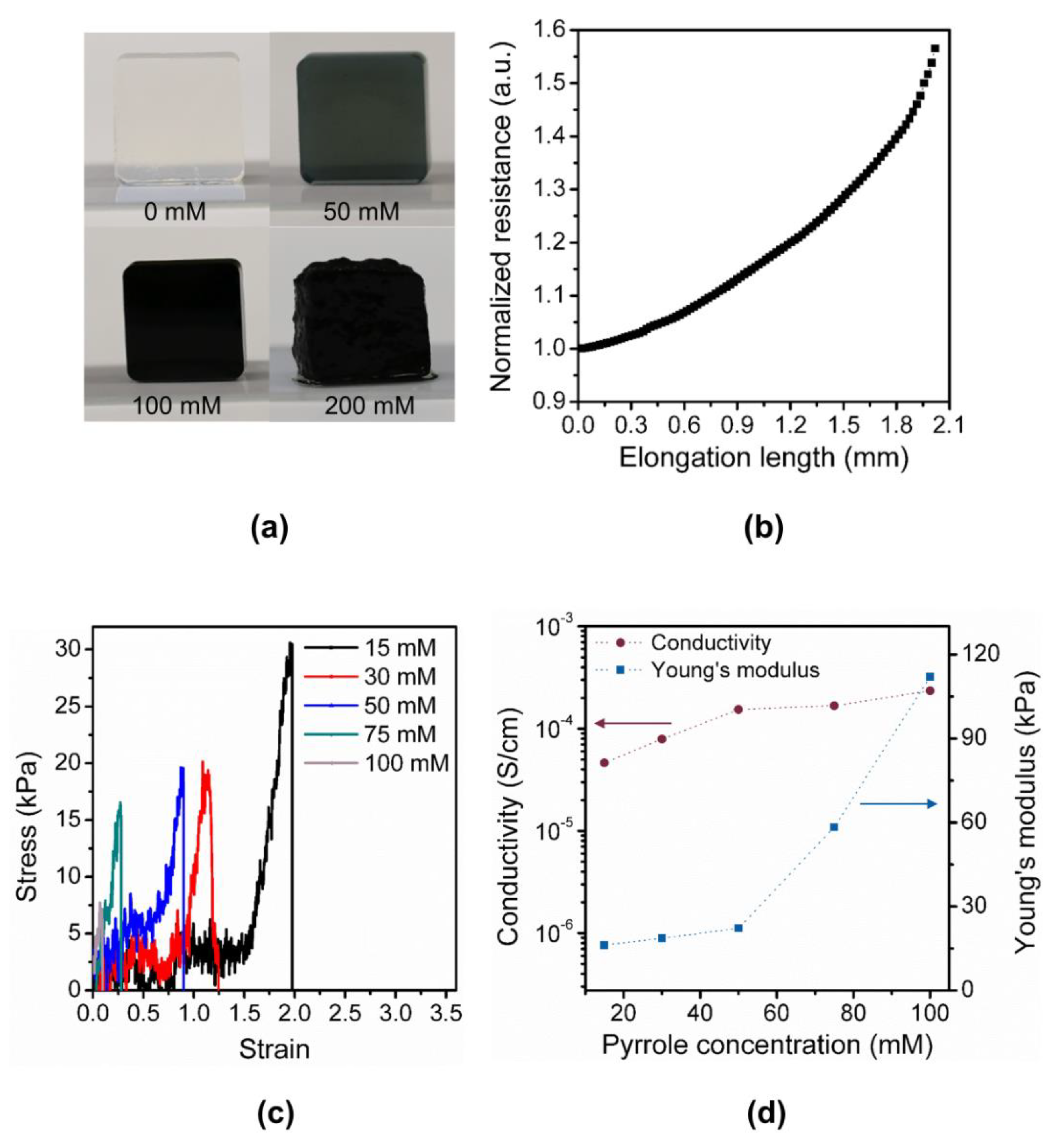
2.2. Fabrication of Polypyrrole/Agarose Hydrogel-Based Discrete Contact-Mode Sensor
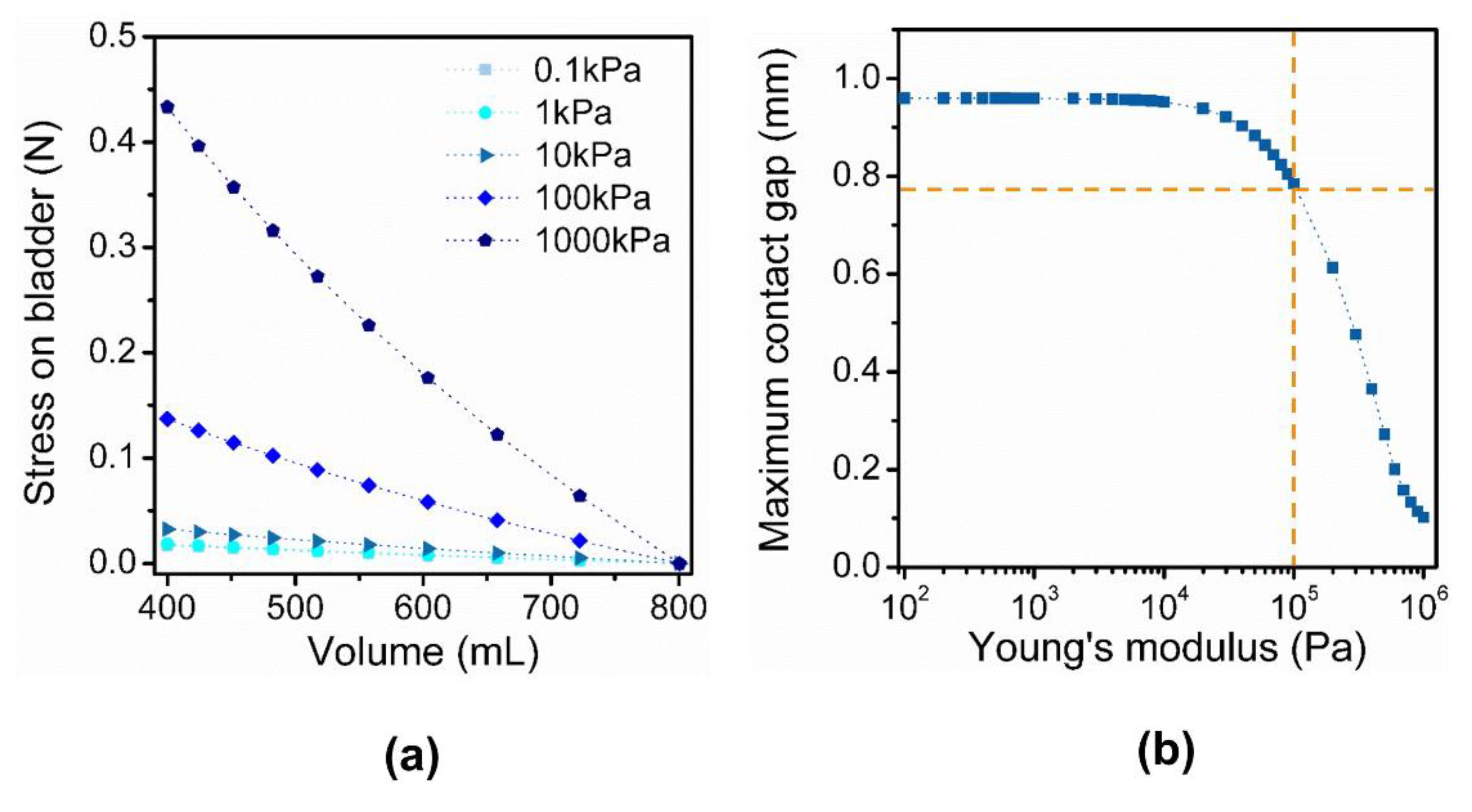
2.3. Finite Element Simulations of Discrete Contact-Mode Sensor
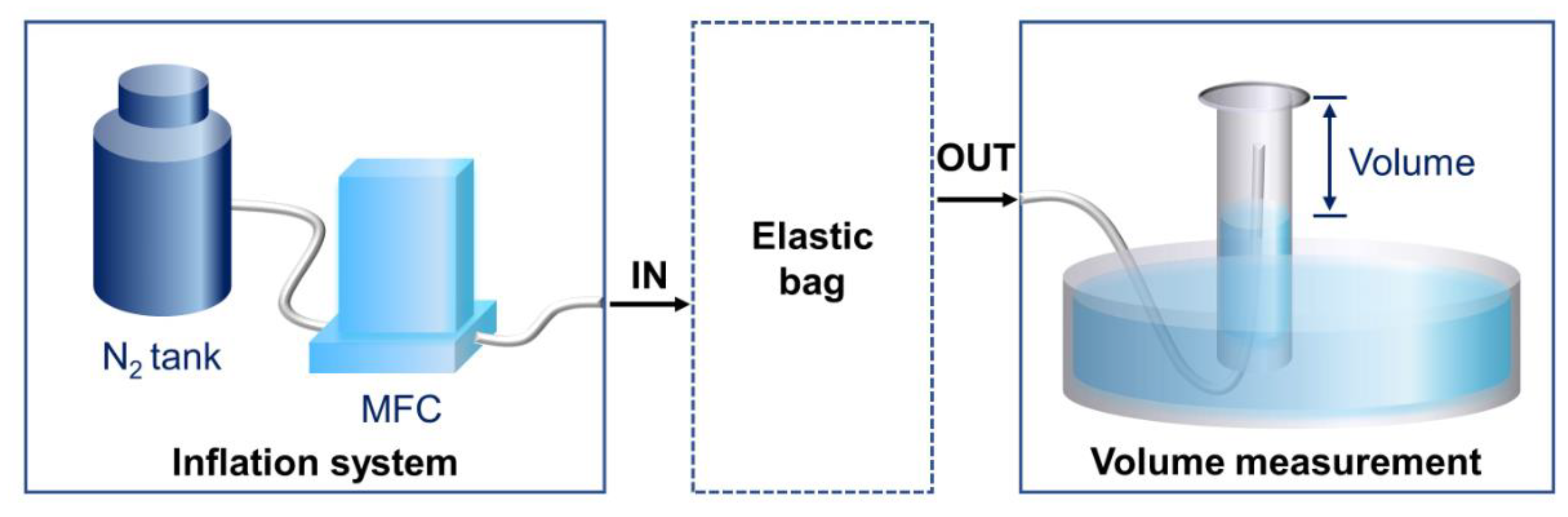
2.4. Measurement of Sensor Response
3. Results
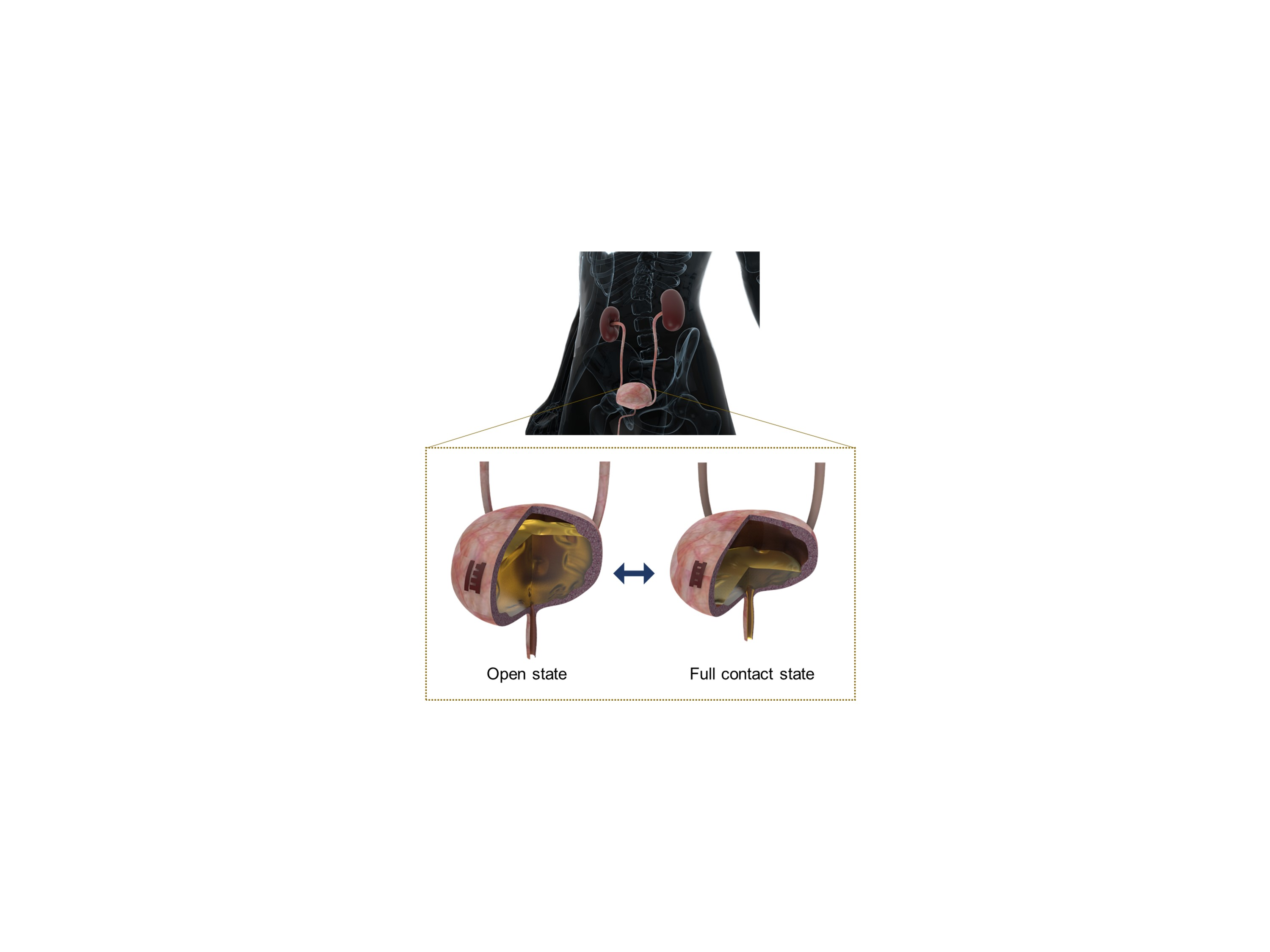
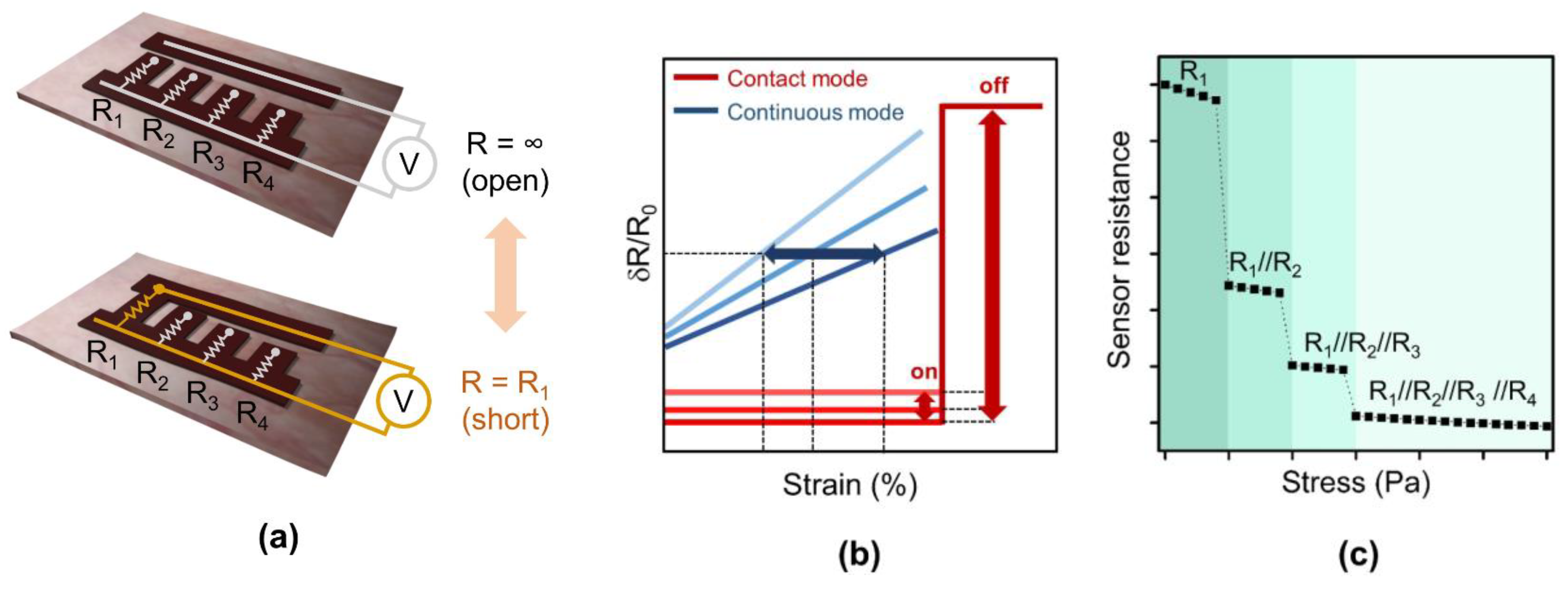
3.1. Working Principle of the Discrete Contact-Mode Sensor
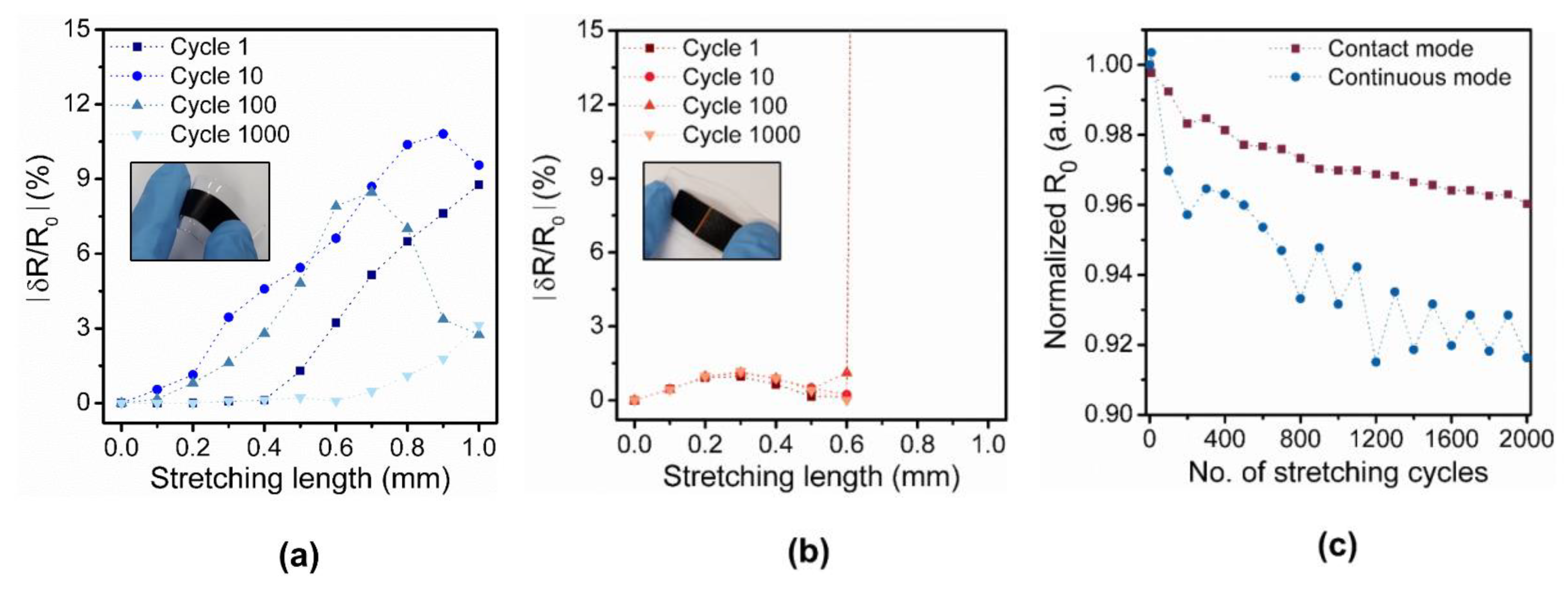
3.2. Comparison of a Continuous Strain Sensor and a Discrete Contact-Mode Sensor
3.3. Design and Optimization of a Discrete Contact-Mode Sensor
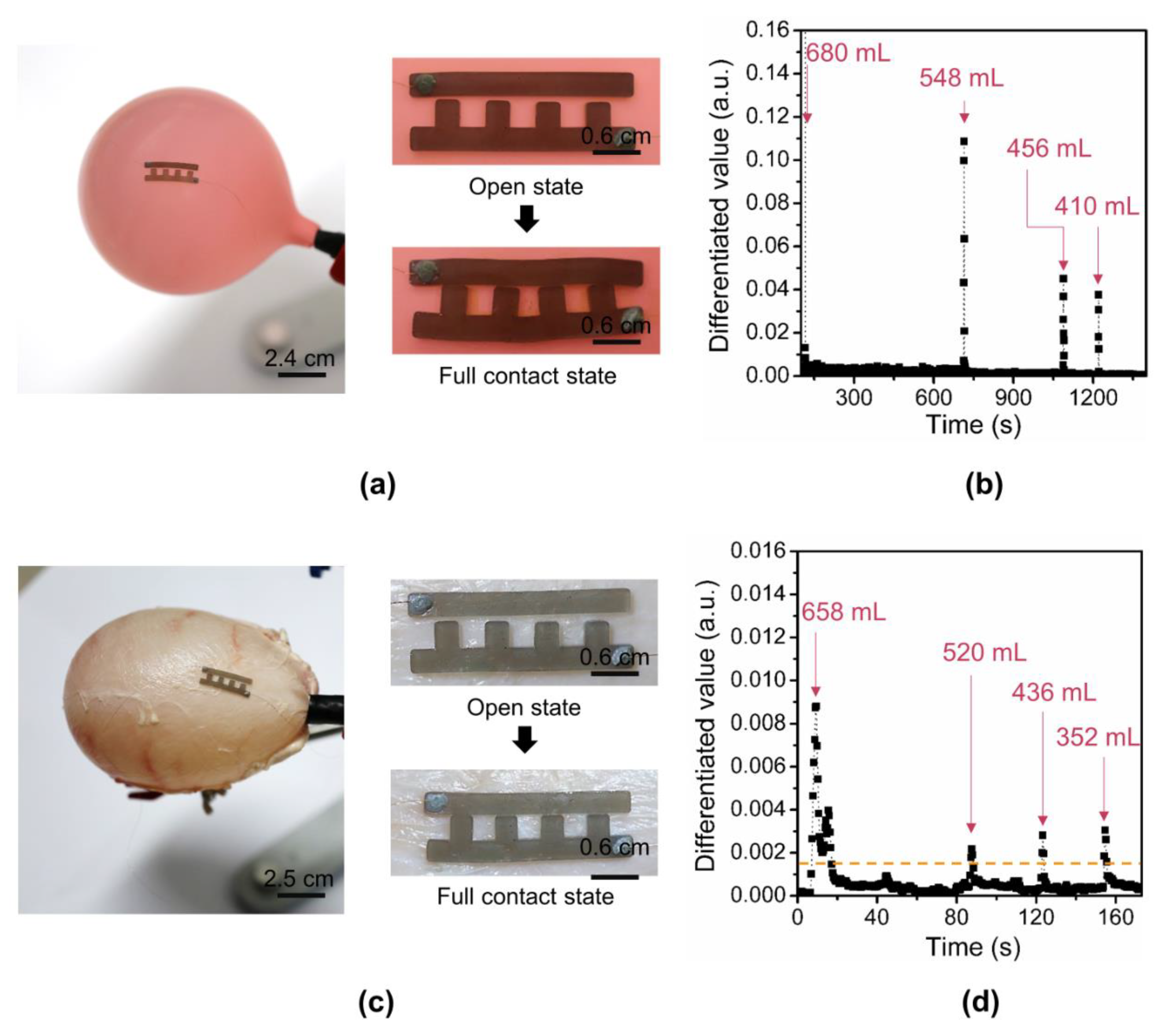
3.4. Balloon and Ex Vivo Experimental Results
4. Discussion
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
References
- Chancellor, M.B. Mapping the Future for Incontinence Treatment Worldwide. Rev. Urol. 1999, 1, 145. [Google Scholar] [PubMed]
- Sarkar, P.K.; Ritch, A.E.S. Management of Urinary Incontinence. J. Clin. Pharm. Ther. 2000, 25, 251–264. [Google Scholar] [CrossRef] [PubMed]
- Yeung, C.K.; Chiu, H.N.; Sit, F.K.Y. Bladder dysfunction in children with refractory monosymptomatic primary nocturnal enuresis. J. Urol. 1999, 162, 1049–1054. [Google Scholar] [CrossRef]
- Wang, L.H.; Tsai, M.F.; Han, C.Y.S.; Huang, Y.C.; Liu, H.E. Is bladder training by clamping before removal necessary for short-term indwelling urinary catheter inpatient? A systematic review and meta-analysis. Asian Nurs. Res. 2016, 10, 173–181. [Google Scholar] [CrossRef] [PubMed]
- German, K.; Rowley, P.; Stone, D.; Kumar, U.; Blackford, H.N. A randomized cross-over study comparing the use of a catheter valve and a leg-bag in urethrally catheterized male patients. BJU Int. 1997, 79, 96–98. [Google Scholar] [CrossRef] [Green Version]
- Forsythe, W.I.; Redmond, A. Enuresis and spontaneous cure rate: Study of 1129 enuretics. Arch. Dis. 1974, 49, 259–263. [Google Scholar] [CrossRef] [Green Version]
- Ghani, K.R.; Pilcher, J.; Rowland, D.; Patel, U.; Nassiri, D.; Anson, K. Portable ultrasonography and bladder volume accuracy—A comparative study using three-dimensional ultrasonography. Urology 2008, 72, 24–28. [Google Scholar] [CrossRef] [PubMed]
- Petrican, P.; Sawan, M.A. Design of a miniaturized ultrasonic bladder volume monitor and subsequent preliminary evaluation on 41 enuretic patients. IEEE Trans. Rehabil. Eng. 1998, 6, 66–74. [Google Scholar] [CrossRef] [PubMed]
- Liao, W.C.; Jaw, F.S. Noninvasive electrical impedance analysis to measure human urinary bladder volume. J. Obstet. Gynaecol. Res. 2011, 37, 1071–1075. [Google Scholar] [CrossRef] [PubMed]
- Thomas, B.J.; Cornish, B.H.; Ward, L.C. Bioelectrical impedance analysis for measurement of body fluid volumes: A review. J. Clin. Eng. 1992, 17, 505–510. [Google Scholar] [CrossRef] [PubMed]
- Boyer, S.; Sawan, M.; Abdel-Gawad, M.; Robin, S.; Elhilali, M.M. Implantable selective stimulator to improve bladder voiding: Design and chronic experiments in dogs. IEEE Trans. Rehabil. Eng. 2000, 8, 464–470. [Google Scholar] [CrossRef] [PubMed]
- Mendez, A.; Sawan, M.; Minagawa, T.; Wyndaele, J.J. Estimation of Bladder Volume from Afferent Neural Activity. IEEE Trans. Neural Syst. Rehabil. Eng. 2013, 21, 704–715. [Google Scholar] [CrossRef] [PubMed]
- Saleh, A.; Sawan, M.; Elzayat, E.A.; Corcos, A.; Elhilali, M.M. Detection of the bladder volume from the neural afferent activities in dogs: Experimental results. Neurol. Res. 2008, 30, 28–35. [Google Scholar] [CrossRef] [PubMed]
- Melgaard, J.; Rijkhoff, N.J.M. Detecting the Onset of Urinary Bladder Contractions Using an Implantable Pressure Sensor. IEEE Trans. Neural Syst. Rehabil. Eng. 2011, 19, 700–708. [Google Scholar] [CrossRef] [PubMed]
- Rosengren, L.; Rangsten, P.; Backlund, Y.; Hok, B.; Svedbergh, B.; Selen, G. A system for passive implantable pressure sensors. Sens. Actuators A Phys. 1994, 43, 55–58. [Google Scholar] [CrossRef]
- Cao, H.; Thakar, S.K.; Fu, T.; Sheth, M.; Oseng, M.L.; Landge, V.; Seo, Y.S.; Chiao, J.C. A Wireless Strain Sensor System for Bladder Volume Monitoring. In Proceedings of the 2011 IEEE MTT-S International Microwave Symposium, Baltimore, MD, USA, 5–10 June 2011; pp. 1–4. [Google Scholar]
- Dreher, R.D.; Timm, G.W.; Bradley, W.E. Bladder volume sensing by local distension measurement. IEEE Trans. Bio-Med. Eng. 1972, BME-19, 247–248. [Google Scholar] [CrossRef] [PubMed]
- Rajagopalan, S.; Sawan, M.; Ghafar-Zadeh, E.; Savadogo, O.; Chodavarapu, V.P. A polypyrrole-based strain sensor dedicated to measure bladder volume in patients with urinary dysfunction. Sensors 2008, 8, 5081–5095. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.; Hou, C.; Zheng, X.; Zhang, W.; Chen, A.; Xu, Z. Design and Evaluation of a New Bladder Volume Monitor. Arch. Phys. Med. Rehabil. 2009, 90, 1944–1947. [Google Scholar] [CrossRef] [PubMed]
- Waltz, F.M.; Timm, G.W.; Bradley, W.E. Bladder volume sensing by resistance measurement. IEEE Trans. Bio-Med. Eng. 1971, BME-18, 42–46. [Google Scholar] [CrossRef]
- Malbrain, M.L.; Deeren, D.H. Effect of bladder volume on measured intravesical pressure: A prospective cohort study. Crit. Care 2006, 10, R98. [Google Scholar] [CrossRef] [PubMed]
- Li, C.; Guan, G.; Zhang, F.; Song, S.; Wang, R.K.; Huang, Z.; Nabi, G. Quantitative elasticity measurement of urinary bladder wall using laser-induced surface acoustic waves. Biomed. Opt. Express 2014, 5, 4313–4328. [Google Scholar] [CrossRef] [PubMed]
- Doehring, T.C.; Carew, E.O.; Vesely, I. The effect of strain rate on the viscoelastic response of aortic valve tissue: A direct-fit approach. Ann. Biomed. Eng. 2004, 32, 223–232. [Google Scholar] [CrossRef] [PubMed]
- Van de Plassche, R.J. CMOS Integrated Analog-to-Digital and Digital-to-Analog Converters, 2nd ed.; Springer: Berlin, Germany, 2013; ISBN 978-1571812773. [Google Scholar]
- Chen, P.J.; Rodger, D.C.; Saati, S.; Humayun, M.S.; Tai, Y.C. Microfabricated Implantable Parylene-Based Wireless Passive Intraocular Pressure Sensors. J. Microelectromech. Syst. 2008, 17, 1342–1351. [Google Scholar] [CrossRef]
- Axisa, F.; Jourand, P.; Lippens, E.; Rymarczyk-Machal, M.; De Smet, N.; Schacht, E.; Vanfleteren, J.; Puers, R.; Cornelissen, R. Design and Fabrication of a Low Cost Implantable Bladder Pressure Monitor. In Proceedings of the 2009 Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Minneapolis, MN, USA, 3–6 September2009; pp. 4864–4867. [Google Scholar]
- Bridges, A.W.; García, A.J. Anti-Inflammatory Polymeric Coatings for Implantable Biomaterials and Devices. J. Diabetes Sci. Technol. 2008, 2, 984–994. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Romero, I.S.; Schurr, M.L.; Lally, J.V.; Kotlik, M.Z.; Murphy, A.R. Enhancing the Interface in Silk-Polypyrrole Composites through Chemical Modification of Silk Fibroin. ACS Appl. Mater. Interfaces 2013, 5, 553–564. [Google Scholar] [CrossRef] [PubMed]
- Ramesh, M.V.; Raj, D.; Dilraj, N. Design of Wireless Real Time Artificial Sphincter Control System for Urinary Incontinence. In Proceedings of the 2014 International Symposium on Technology Management and Emerging Technologies, Bandung, Indonesia, 27–29 May 2014; pp. 44–49. [Google Scholar]
- Fletter, P.C.; Majerus, S.; Cong, P.; Damaser, M.S.; Ko, W.H.; Young, D.J.; Garverick, S.L. Wireless Micromanometer System for Chronic Bladder Pressure Monitoring. In Proceedings of the 2009 Sixth International Conference on Networked Sensing Systems (INSS), Pittsburgh, PA, USA, 17–19 June 2009; pp. 1–4. [Google Scholar]
- Bazaka, K.; Jacob, M.V. Implantable devices: Issues and challenges. Electronics 2012, 2, 1–34. [Google Scholar] [CrossRef] [Green Version]







© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, M.K.; Lee, S.; Yoon, I.; Kook, G.; Jung, Y.S.; Bawazir, S.S.M.; Stefanini, C.; Lee, H.J. Polypyrrole/Agarose Hydrogel-Based Bladder Volume Sensor with a Resistor Ladder Structure. Sensors 2018, 18, 2288. https://doi.org/10.3390/s18072288
Kim MK, Lee S, Yoon I, Kook G, Jung YS, Bawazir SSM, Stefanini C, Lee HJ. Polypyrrole/Agarose Hydrogel-Based Bladder Volume Sensor with a Resistor Ladder Structure. Sensors. 2018; 18(7):2288. https://doi.org/10.3390/s18072288
Chicago/Turabian StyleKim, Mi Kyung, Sungwoo Lee, Inug Yoon, Geon Kook, Yeon Su Jung, Sarah S. M. Bawazir, Cesare Stefanini, and Hyunjoo J. Lee. 2018. "Polypyrrole/Agarose Hydrogel-Based Bladder Volume Sensor with a Resistor Ladder Structure" Sensors 18, no. 7: 2288. https://doi.org/10.3390/s18072288