
HelpResponder—System for the Security of First Responder Interventions

 , ,
, ,  , and
, and
Abstract
:1. Introduction
2. State of the Art
2.1. Environmental Monitoring
2.2. Image Processing for Flame/Fire Focus Detection
2.3. Location Estimation for Navigation and Firefighter Tracking
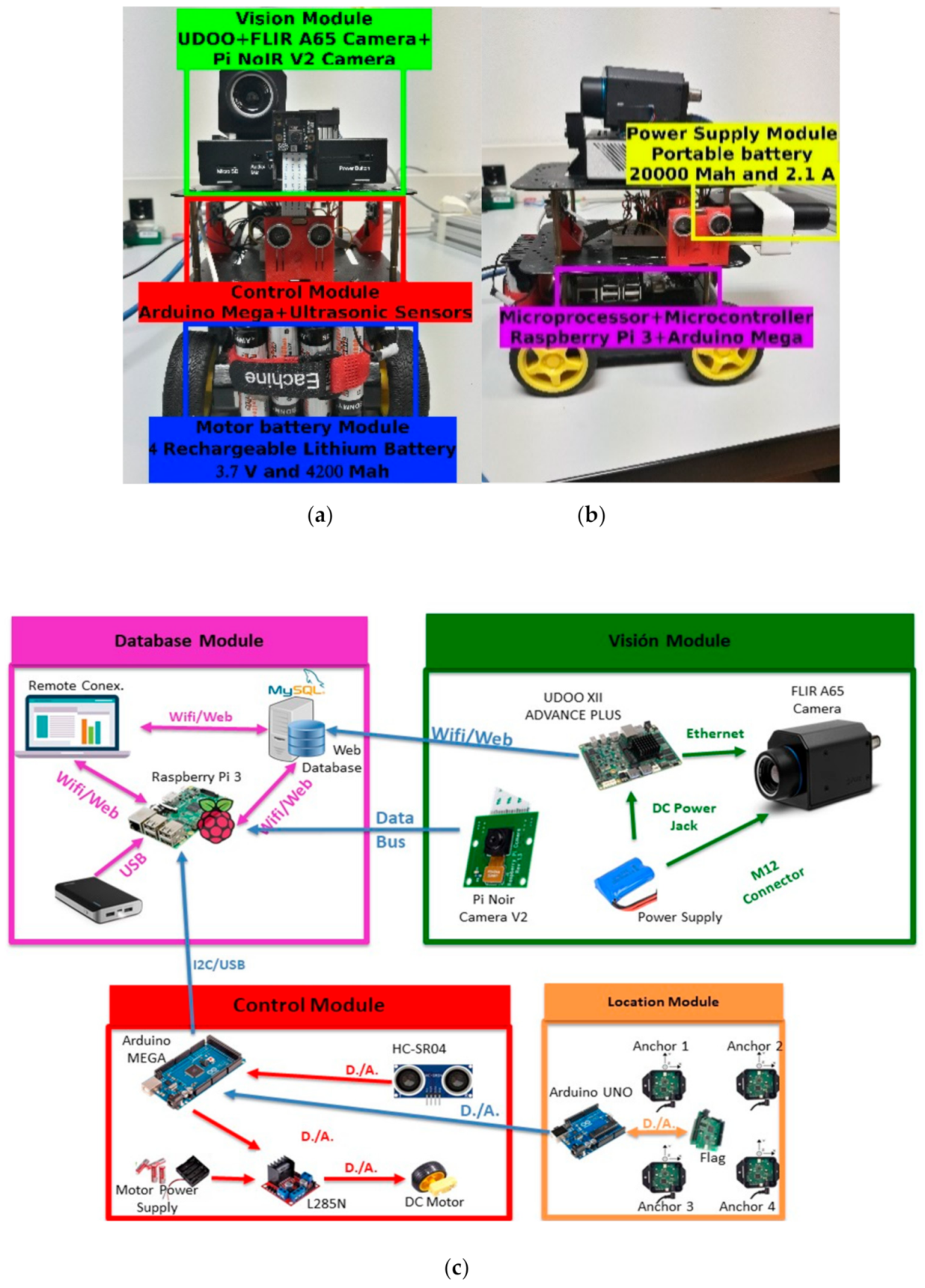
3. Global Description of the Architecture
3.1. Our Contribution
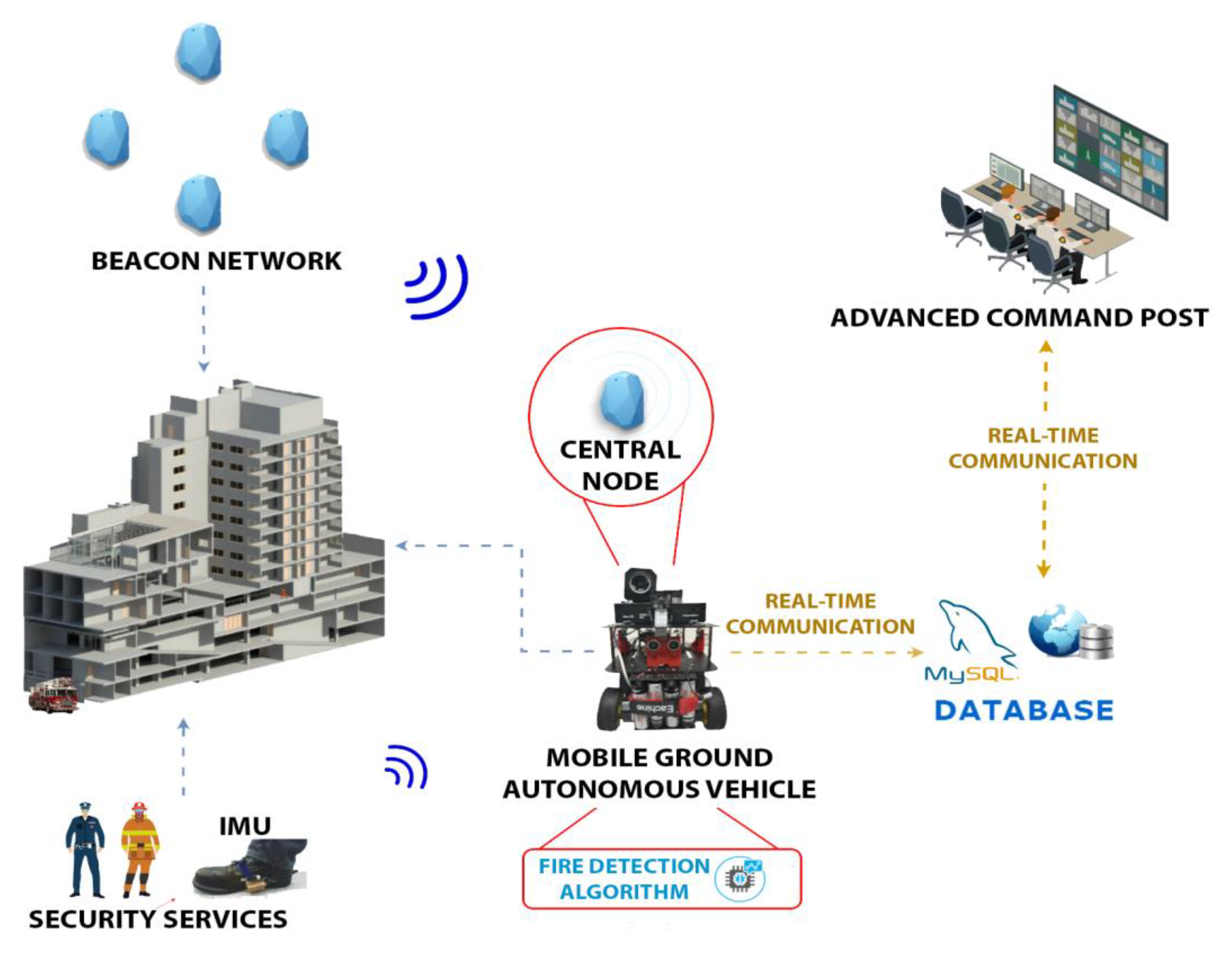
3.2. The Monitoring System
4. Implementation of the Safe and Flame-Aware Intervention Architecture
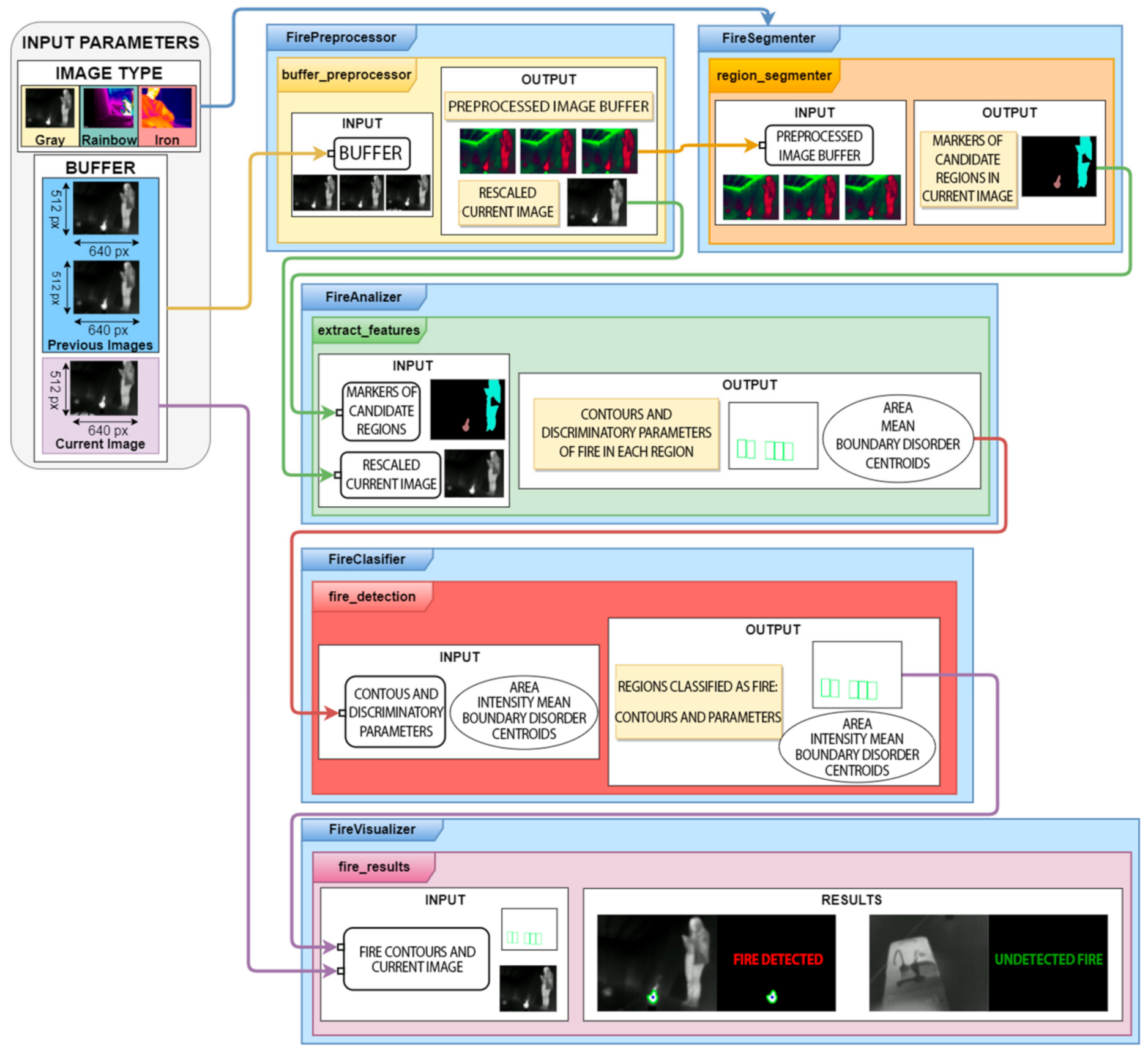
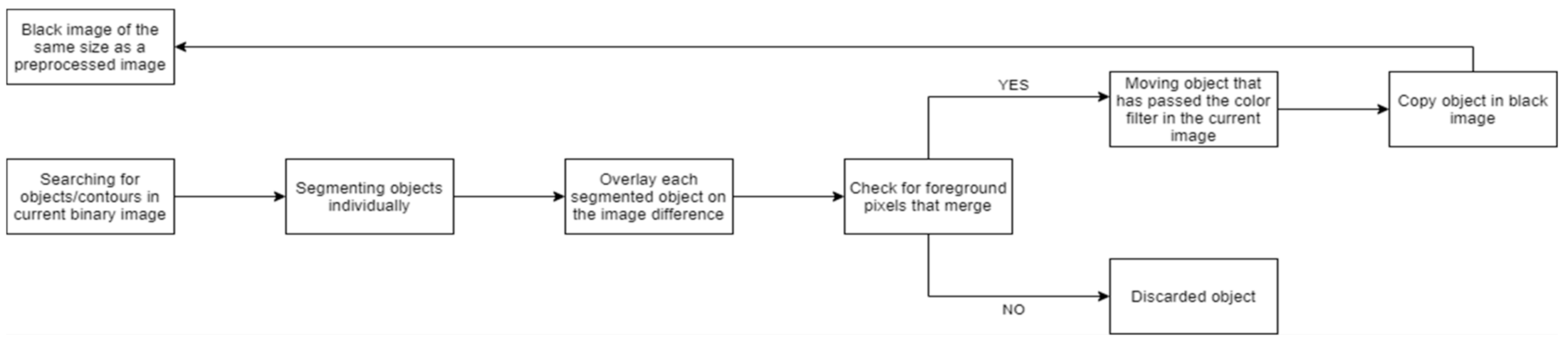
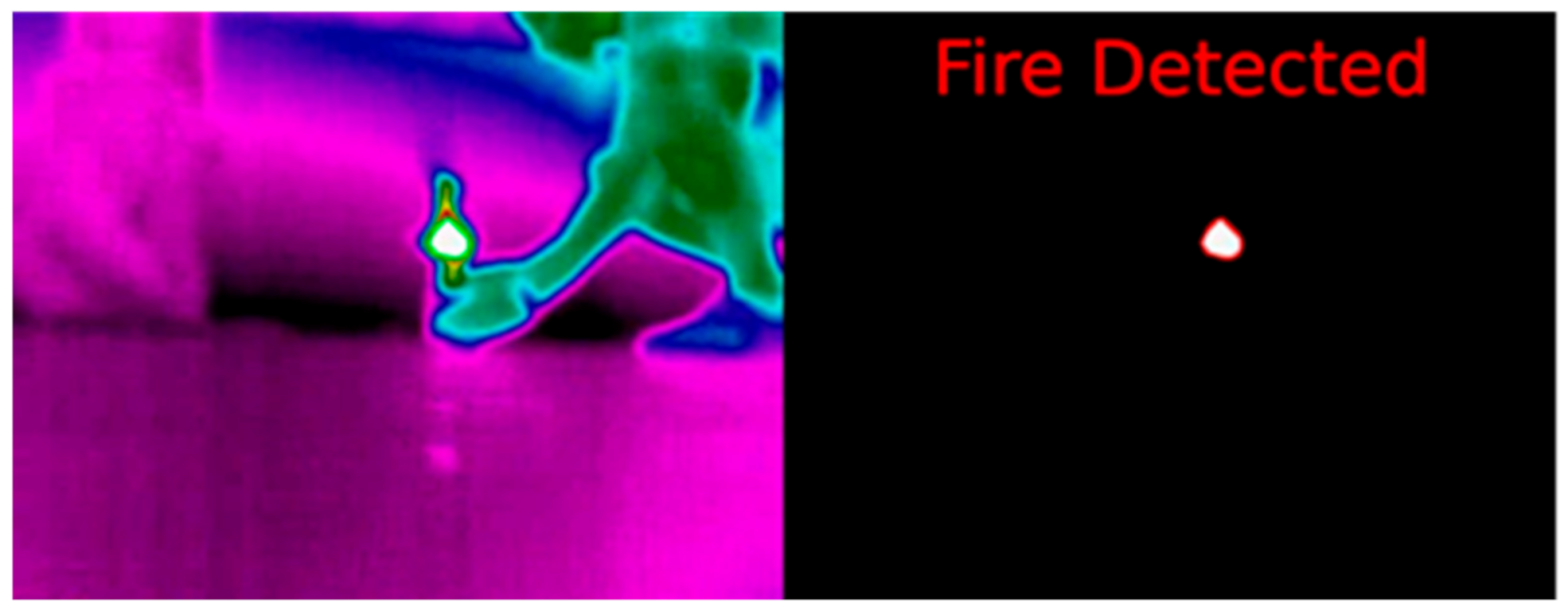
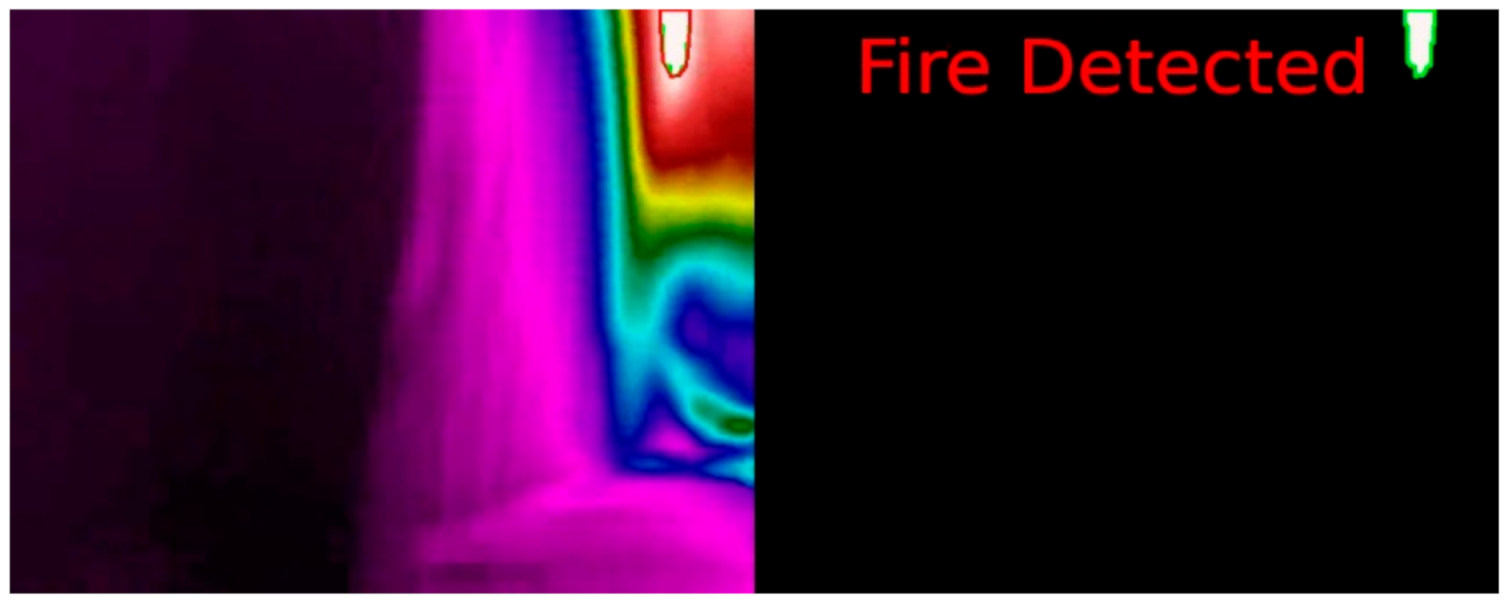
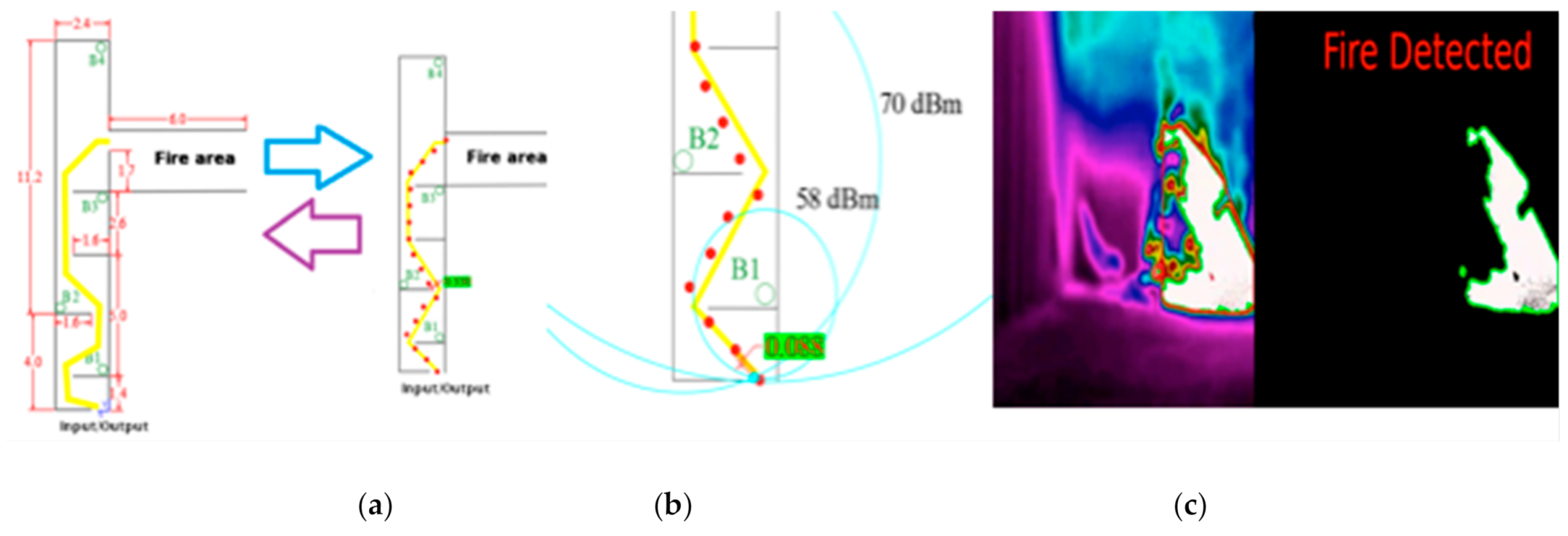
4.1. Fire Detection System
| Algorithm 1. Pseudocode for for checking the regions of the current image to which moving pixels belong. |
| 1. seed_objects_image = np.zeros(diff_image.shape, np.uint8) |
| 2. contours, = cv2.findContours(bin_acutal_image,cv2.RETR_EXTERNAL,cv2.CHAIN_APPROX_SIMPLE) |
| 3. # Each connected region of the original image is overlapped to the image difference |
| 4. for cnt in contours: |
| 5. # The image with the connected region is created. |
| 6. region_image = np.zeros(diff_image.shape, np.uint8) |
| 7. cv2.drawContours(region_image, [cnt], −1, 255, −1) |
| 8. # Image with foreground pixels being those that both in the image and in the region image are foreground |
| 9. movement_region_image = cv2.bitwise_and(diff_image, diff_image, mask = region_image) |
| 10. # if there is foreground pixels → Si hay pixeles de primer plano → Add region to image |
| 11. if not np.all(movement_region_image = 0): |
4.2. Mobile Ground Autonomous Vehicle (MGAV) for Flame/Fire Focus Detection
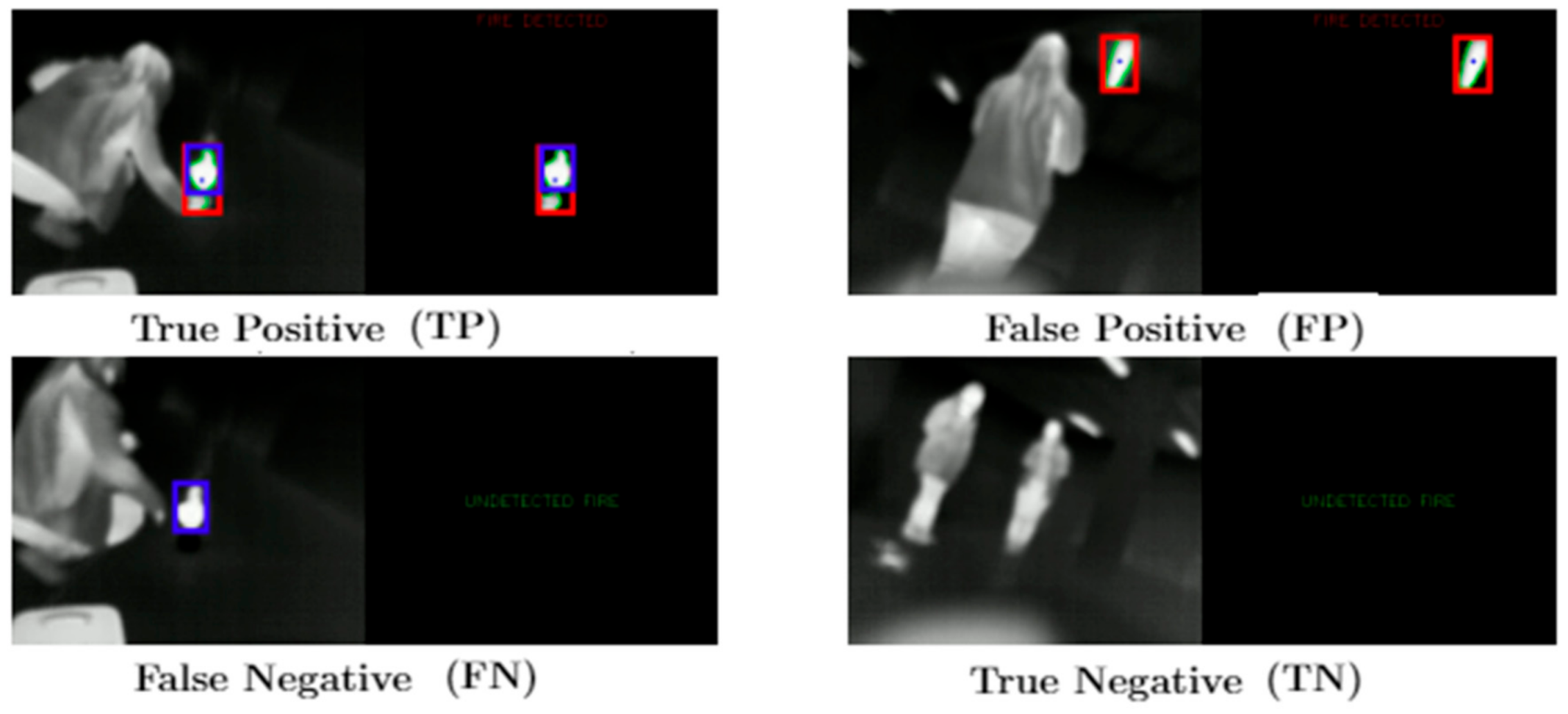
5. Results
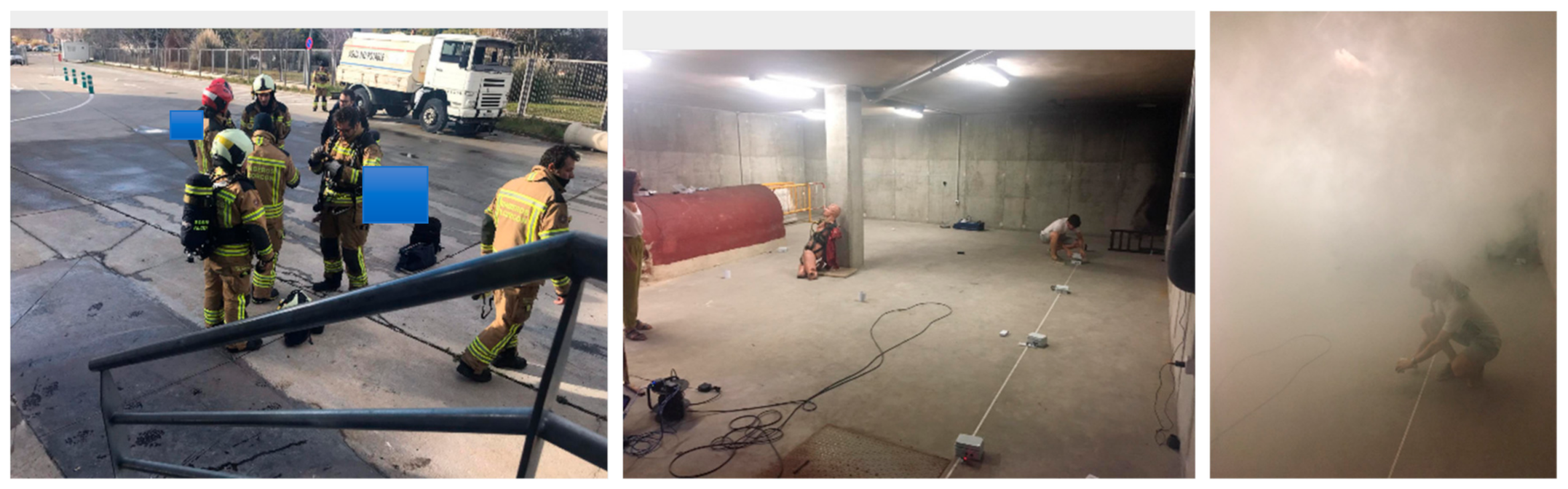
5.1. Test Site 1: Alcorcon USC Fire Tower
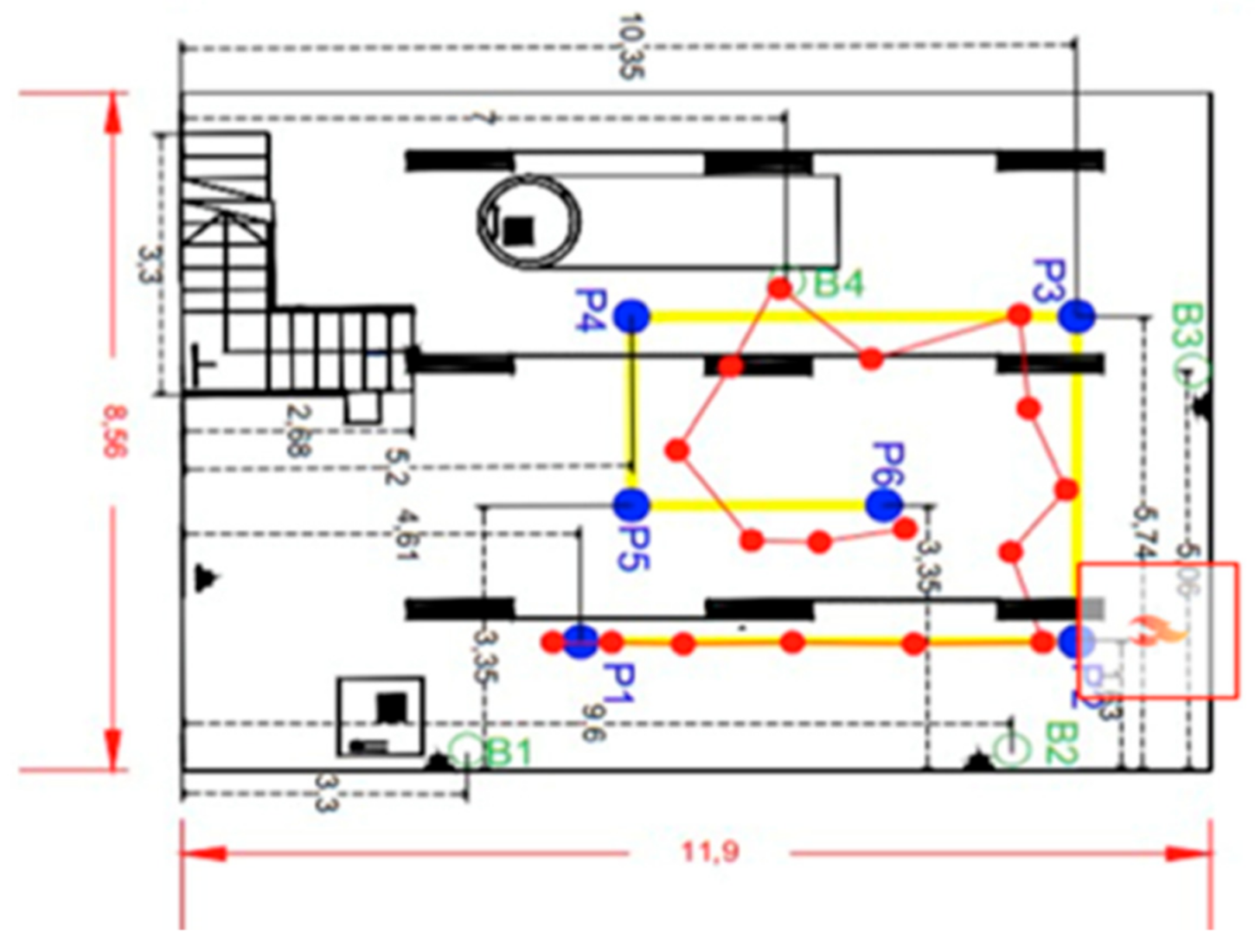
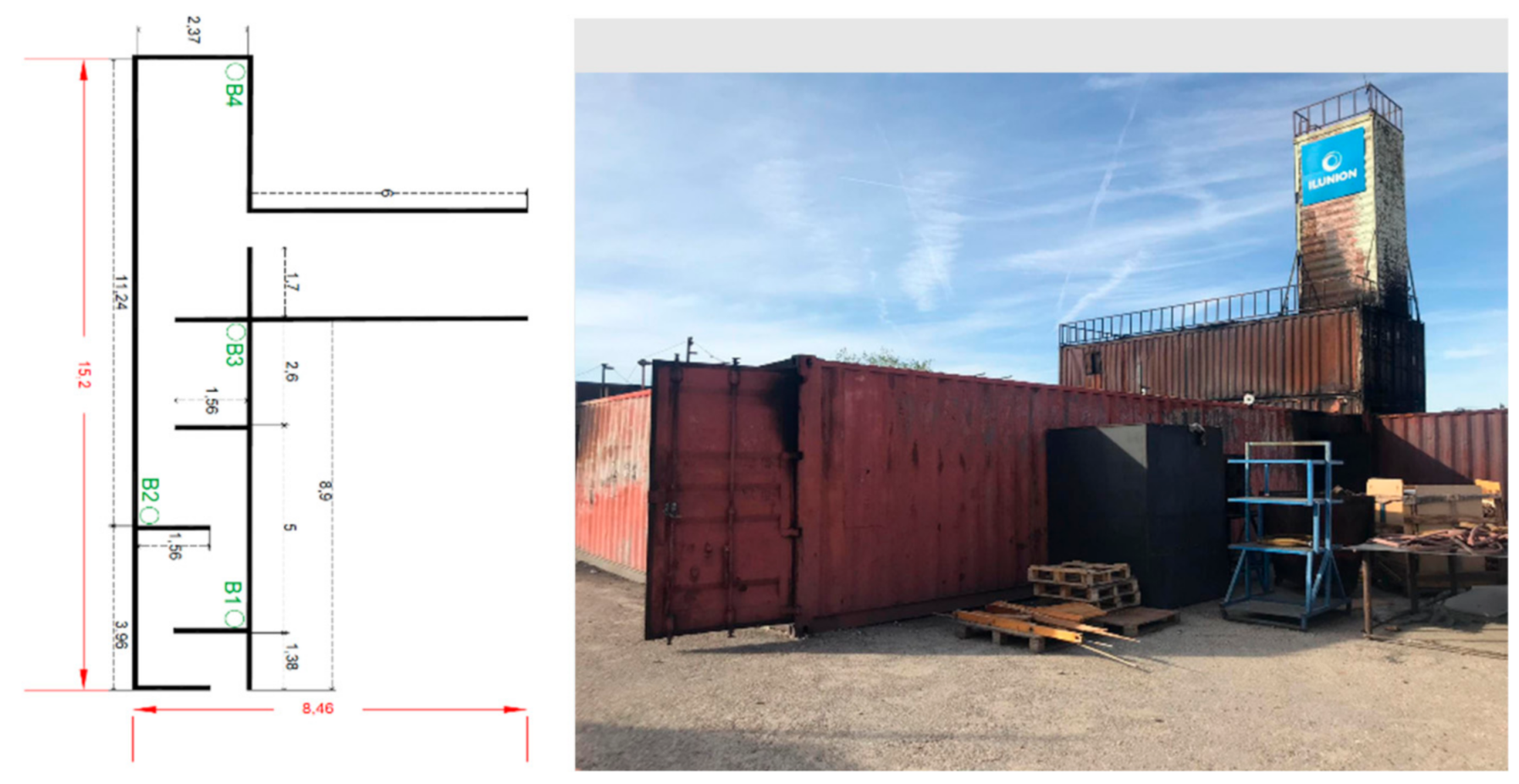
5.2. Test site 2: Teresa Infrastructure
6. Discussion
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Fundación Mapfre. Estudio De Víctimas De Incendios En España. 2017. Available online: https://www.fundacionmapfre.org/fundacion/es_es/images/informe-victimas-incendios-espana-2017_tcm1069-522308.pdf (accessed on 4 March 2021).
- Fahy, R.F.; Molis, J.L. Firefighter Fatalities in the United States; NFPA Emmitsburg: Emmitsburg, MD, USA, 2019; Available online: https://www.nfpa.org/-/media/Files/News-and-Research/Fire-statistics-and-reports/Emergency-responders/osFFF.pdf (accessed on 4 March 2021).
- Barberán, G.A. Incendio en Túneles y Galerías; APTB: Madrid, Spain, 2018. [Google Scholar]
- Deckers, X.; Haga, S.; Tilley, N.; Merci, B. Smoke control in case of fire in a large car park: CFD simulations of full-scale configurations. Fire Saf. J. 2013, 57, 22–34. [Google Scholar] [CrossRef] [Green Version]
- Hwang, C.; Wargo, J. Experimental study of thermally generated reverse stratified layers in a fire tunnel. Combust. Flame 1986, 66, 171–180. [Google Scholar] [CrossRef]
- Hsu, W.-S.; Huang, Y.-H.; Shen, T.-S.; Cheng, C.-Y.; Chen, T.-Y. Analysis of the Hsuehshan Tunnel Fire in Taiwan. Tunn. Undergr. Space Technol. 2017, 69, 108–115. [Google Scholar] [CrossRef]
- Sandhu, H.S.; Singh, K.J.; Kapoor, D.S. Automatic Edge Detection Algorithm and Area Calculation for Flame and Fire Images. In Proceedings of the 2016 6th International Conference—Cloud System and Big Data Engineering (Confluence), Noida, India, 14–15 January 2016; Institute of Electrical and Electronics Engineers (IEEE): New York, NY, USA, 2016; pp. 403–407. [Google Scholar]
- Kong, S.G.; Jin, D.; Shengzhe, L.; Hakil, K. Fast fire flame detection in surveillance video using logistic regression and temporal smoothing. Fire Saf. J. 2016, 79, 37–43. [Google Scholar] [CrossRef]
- Moreira, C.M.; Bascoy, J.M.M.; Cotelo, M.M.; Pérez, C.H. FireBack: Sistema De Prevención, Detección y Monitorización De Incendios Forestales: UC3M ed. 2019. Available online: https://t3chfest.uc3m.es/2019/programa/fireback-sistema-prevencion-deteccion-monitorizacion-incendios-forestales/?lang=es (accessed on 3 November 2020).
- Missouri, S.T. Students Help Fight Fires and Protect Firefighters; Targeted News Service: Washington, DC, USA, 2018. [Google Scholar]
- Fan, H.; Hernandez Bennetts, V.; Schaffernicht, E.; Lilienthal, A.J. Towards Gas Discrimination and Mapping in Emergency Response Scenarios Using a Mobile Robot with an Electronic Nose. Sensors 2019, 19, 685. [Google Scholar] [CrossRef] [Green Version]
- Firdaus, F.; Azurati, A.N.; Sahibuddin, S. A Review of Hybrid Indoor Positioning Systems Employing WLAN Fingerprinting and Image Processing. Int. J. Electr. Comput. Eng. Syst. 2019, 10, 59–72. [Google Scholar] [CrossRef]
- Xing, Y.; Vincent, T.A.; Fan, H.; Schaffernicht, E.; Bennetts, V.H.; Lilienthal, A.J.; Cole, M.; Gardner, J.W. FireNose on a mobile robot in harsh environments. IEEE Sens. J. 2019, 19, 12418–12431. [Google Scholar] [CrossRef]
- Ben Arbia, D.; Alam, M.M.; Kadri, A.; Ben Hamida, E.; Attia, R. Enhanced IoT-based end-to-end emergency and disaster relief system. J. Sens. Actuator Netw. 2017, 6, 19. [Google Scholar] [CrossRef]
- Muhammad, J.; Ahmad, I.; Mehmood, S.; Rho, S.; Baik, W. Convolutional Neural Networks Based Fire Detection in Surveillance Videos. IEEE Access 2018, 6, 18174–18183. [Google Scholar] [CrossRef]
- Hashemzadeh, M.; Zademehdi, A. Fire detection for video surveillance applications using ICA K-medoids-based color model and efficient Spatio-temporal visual features. Expert Syst. Appl. 2019, 130, 60–78. [Google Scholar] [CrossRef]
- Kim, J.H.; Jo, S.; Lattimer, B.Y. Feature selection for intelligent firefighting robot classification of fire, smoke, and thermal reflections using thermal infrared images. J. Sens. 2016. [Google Scholar] [CrossRef] [Green Version]
- Liu, Z.G.; Yang, Y.; Ji, X.H. Flame detection algorithm based on a saliency detection technique and the uniform local binary pattern in the YCbCr color space. Signal Image Video Process. 2016, 10, 277–284. [Google Scholar] [CrossRef]
- Maksymiv, O.P.; Rak, T.J.; Peleshko, D.D. Video-Based Flame Detection Using LBP-Based Descriptor: Influences of Classifiers Variety on Detection Efficiency. 2016. Available online: http://hdl.handle.net/123456789/3499 (accessed on 3 November 2020).
- Lee, S.; Kim, H.; Lee, B. An Efficient Rescue System with Online Multi-Agent SLAM Framework. Sensors 2020, 20, 235. [Google Scholar] [CrossRef] [Green Version]
- Esfahlani, S.S. Mixed reality and remote sensing application of unmanned aerial vehicle in fire and smoke detection. J. Ind. Inf. Integr. 2019, 15, 42–49. [Google Scholar] [CrossRef]
- Lahouli, R.; Chaudhary, M.H.; Basak, S.; Scheers, B. Tracking of Rescue Workers in Harsh Indoor and Outdoor Environments. In International Conference on Ad-Hoc Networks and Wireless; Springer: Cham, Switzerland, 2019; pp. 48–61. [Google Scholar]
- Romeo, L.; Petitti, A.; Colella, R.; Valecce, G.; Boccadoro, P.; Milella, A.; Grieco, L.A. Automated Deployment of Iot Networks in Outdoor Scenarios Using an Unmanned Ground Vehicle. In Proceedings of the 2020 IEEE International Conference on Industrial Technology (ICIT), Buenos Aires, Argentina, 26–28 February 2020; IEEE: New York, NY, USA, 2020; pp. 369–374. [Google Scholar]
- Zafari, F.; Gkelias, A.; Leung, K.K. A survey of indoor localization systems and technologies. IEEE Commun. Surv. Tutor. 2019, 21, 2568–2599. [Google Scholar] [CrossRef] [Green Version]
- Prieto, J.C.; Croux, C.; Jiménez, A.R. RoPEUS: A new robust algorithm for static positioning in ultrasonic systems. Sensors 2009, 9, 4211–4229. [Google Scholar] [CrossRef] [Green Version]
- Bbosale, A.; Benny, G.; Jaison, R.; Kbot, A.; Pati, S. Indoor Navigation System using BLE Beacons. In Proceedings of the International Conference on Nascent Technologies in Engineering (ICNTE), Navi Mumbai, India, 4–5 January 2019; IEEE: New York, NY, USA, 2019; pp. 1–6. [Google Scholar]
- Zampella, F.; Bahillo, A.; Prieto, J.; Jiménez, A.R.; Seco, F. Pedestrian navigation fusing inertial and RSS/TOF measurements with adaptive movement/measurement models: Experimental evaluation and theoretical limits. Sens. Actuators A Phys. 2013, 203, 249–260. [Google Scholar] [CrossRef]
- Muñoz, E.; de Ponte Müller, F.; Jiménez, A.R.; Zampella, F. Evaluation of AHRS algorithms for inertial personal localization in industrial environments. In Proceedings of the 2015 IEEE International Conference on Industrial Technology (ICIT), Seville, Spain, 17–19 March 2015; pp. 3412–3417. [Google Scholar]
- Zampella, F.; De Angelis, A.; Skog, I.; Zachariah, D.; Jiménez, A. A Constraint Approach for UWB and PDR Fusion. In Proceedings of the 2012 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sydney, NSW, Australia, 13–15 November 2012; IEEE: New York, NY, USA, 2012; pp. 1–9. [Google Scholar]
- Zampella, F.J.; Jiménez, A.R.; Seco, F.; Prieto, J.C.; Guevara, J.I. Simulation of foot-mounted IMU signals for the evaluation of PDR algorithms. In Proceedings of the 2011 International Conference on Indoor Positioning and Indoor Navigation, Guimarães, Portugal, 21–23 September 2011; IEEE: New York, NY, USA, 2011; pp. 1–7. [Google Scholar]
- Jiménez, A.R.; Seco, F.; Zampella, F.; Prieto, J.C.; Guevara, J. Indoor Localization of Persons in Aal Scenarios Using an Inertial Measurement Unit (IMU) and the Signal Strength (SS) from RFID Tags. In International Competition on Evaluating AAL Systems through Competitive Benchmarking; Springer: Berlin/Heidelberg, Germany, 2012; pp. 32–51. [Google Scholar]
- Jimenez, A.R.; Seco, F.; Prieto, C.; Guevara, J. A comparison of pedestrian dead-reckoning algorithms using a low-cost MEMS IMU. In Proceedings of the 2009 IEEE International Symposium on Intelligent Signal Processing, Budapest, Hungary, 26–28 August 2009; IEEE: New York, NY, USA, 2012; pp. 129–139. [Google Scholar]
- Nordic Semiconductor Manufacturer. United Kingdom. nRF52840 Preview Development Kit. User Guide V1.2. Available online: http://infocenter.nordicsemi.com/pdf/nRF52840_PDK_User_Guide_v1.2 (accessed on 3 March 2021).
- Galloso, R.O.; Sánchez, M.C.R.; López, J.V.; Martín, D.M. Plataforma Docente basada en un Agente Autónomo Móvil de Bajo Coste. In TICAI 2017: TICs para el Aprendizaje de la Ingeniería; Universidade de Vigo: Vigo, Spain, 2018; pp. 69–76. ISBN 978-84-8158-774-6. [Google Scholar]
- Manual FLIR Ax5 Series. Available online: https://www.google.com/url?sa=t&rct=j&q=&esrc=s&source=web&cd=1&ved=2ahUKEwj4qILZ9KDlAhWB2-AKHUE2CroQFjAAegQIARAC&url=https%3A%2F%2Fwww.flir.com%2Fglobalassets%2Fimported-assets%2Fdocument%2Fflir-ax5-usre-manual.pdf&usg=AOvVaw3YUXPQsCI2rVMETBY-vOnx (accessed on 4 July 2020).
- UDOO X86 II ADVANCED PLUS. Available online: https://shop.udoo.org/udoo-x86-ii-advanced-plus.html (accessed on 4 March 2021).
- Gong, F.; Li, C.; Gong, W.; Li, X.; Yuan, X.; Ma, Y.; Song, T. A real-time fire detection method from video with multifeature fusion. Comput. Intell. Neurosci. 2019. [Google Scholar] [CrossRef] [Green Version]
- Luque, A.; Carrasco, A.; Martín, A.; de las Heras, A. The impact of class imbalance in classification performance metrics based on the binary confusion matrix. Pattern Recognit. 2019, 91, 216–231. [Google Scholar] [CrossRef]
- Hanwei Electronics. Technical Data mq-7 Gas Sensor. Available online: https://www.sparkfun.com/datasheets/Sensors/Biometric/MQ-7.pdf (accessed on 3 March 2021).
- Oguejiofor, O.; Okorogu, V.; Adewale, A.; Osuesu, B. Outdoor localization system using RSSI measurement of wireless sensor network. Int. J. Innov. Technol. Explor. Eng. 2013, 2, 1–6. [Google Scholar]
- Vara, N.; Poletto, G.A.; Cáceres, M.; Busso, A.J. Cálculo de distancia entre los nodos de una red inalámbrica zigbee en función del parámetro RSSI. Ext. Innov. Transf. Tecnol. 2015, 2, 8–13. [Google Scholar] [CrossRef]
- Deffenbaugh, M.; Bellingham, J.G.; Schmidt, H. The Relationship between Spherical and Hyperbolic Positioning. In Proceedings of the OCEANS 96 MTS/IEEE Conference Proceedings. The Coastal Ocean—Prospects for the 21st Century, Fort Lauderdale, FL, USA, 6–9 October 1997; Volume 2, pp. 590–595. [Google Scholar] [CrossRef]
- Images of Helpresponder. Available online: https://github.com/senialab/Monitoring-Systemfor-Fire-Situational-Awarenessin-Emergency-Situations (accessed on 5 December 2020).
- Mazuelas, S.; Bahillo, A.; Lorenzo, R.M.; Fernandez, P.; Lago, F.A.; Garcia, E. Robust indoor positioning provided by real-time RSSI values in unmodified WLAN networks. IEEE J. Sel. Top. Signal Process. 2009, 3, 821–831. [Google Scholar] [CrossRef]
- Caldeira, M.M.; Padaratz, I.J. Potentialities of infrared thermography to assess damage in bonding between concrete and GFRP. Rev. Ibracon Estrus. Mater. 2015, 8, 296–322. [Google Scholar] [CrossRef] [Green Version]
- Purohit, A.; Sun, Z.; Mokaya, F.; Zhang, P. SensorFly: Controlled-Mobile Sensing Platform for Indoor Emergency Response Applications. In Proceedings of the 10th ACM/IEEE: International Conference on Information Processing in Sensor Networks, Chicago, IL, USA, 12–14 April 2011; pp. 223–234. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Static Parameters | Tx = 8 dB | Tx = 0 dB | Tx = −8 dB | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| RSSI (dBm) | RSSI (dBm) | RSSI (dBm) | |||||||||||
| B1 | B2 | B3 | B4 | B1 | B2 | B3 | B4 | B1 | B2 | B3 | B4 | ||
| Average | Smokeless | −58.83 | −59.82 | −63.00 | −58.18 | −66.36 | −67.18 | −71.45 | −63.00 | −73.27 | −76.09 | −75.27 | −74.09 |
| With smoke | −57.55 | −56.13 | −58.37 | −56,21 | −65.27 | −65.27 | −68.95 | −65.64 | −72.64 | −70.84 | −74.91 | −73.59 | |
| Mode | Smokeless | −62 | −55 | −64 | −60 | −69 | −71 | − | −69 | −75 | −80 | −79 | −77 |
| With smoke | −66 | − | −56 | −59 | −70 | −71 | −71 | −68 | − | −81 | −73 | − | |
| Median | Smokeless | −62 | −59 | −64 | −60 | −69 | −69 | −73 | −65 | −75 | −80 | −79 | −77 |
| With smoke | −61 | −57 | −57 | −58 | −67 | −65 | −71 | −68 | −75 | −72 | −75 | −74 | |
| Maximum | Smokeless | −70 | −72 | −74 | −64 | −78 | −79 | −80 | −70 | −82 | −85 | −88 | −86 |
| With smoke | −66 | −66 | −71 | −62 | −76 | −82 | −82 | −73 | −84 | −82 | −89 | −84 | |
| Standard deviation | Smokeless | 9.90 | 7.17 | 8.51 | 6.1 | 10.77 | 8.84 | 7.09 | 6.12 | 8.49 | 8.97 | 13.47 | 8.10 |
| With smoke | 11.20 | 8.74 | 5.63 | 5.81 | 10.72 | 10.09 | 8.01 | 8.43 | 9.11 | 10.35 | 9.99 | 10.38 | |
| Variance | Smokeless | 98.04 | 51.36 | 72.40 | 37.16 | 116.05 | 78.16 | 50.27 | 37.40 | 72.02 | 80.49 | 181.,42 | 65.69 |
| With smoke | 125.47 | 76.35 | 31.67 | 33.76 | 114.82 | 101.82 | 64.12 | 71.05 | 83.05 | 107.03 | 99.89 | 107.84 | |
| Beacons | Position on the x-Axis (m) | Position on the y-Axis (m) | Points | Position on the x-Axis (m) | Position on the y-Axis (m) |
| P1 | 1.63 | 4.61 | |||
| P2 | 1.63 | 10.35 | |||
| B1 | 0 | 3.3 | P3 | 5.74 | 10.35 |
| B2 | 0 | 9.6 | P4 | 5.74 | 5.2 |
| B3 | 5.06 | 11.89 | P5 | 3.35 | 5.2 |
| B4 | 6.38 | 7 | P6 | 3.35 | 8.12 |
| Video Characteristics | Duration (Minutes) | Frames (Total Number) | Resolution (Pixels) | Image Type |
|---|---|---|---|---|
| 1:40 | 1.000 | 640 × 512 | Original | |
| Detection metrics | Accuracy (%) | Precision (%) | Recall (%) | F1 Score (%) |
| 79% | 94% | 74% | 83% | |
| Processing time | No optional parameters | With optional parameters | ||
| Complete video (s) | 1 frame (s) | Complete video (s) | 1 frame (s) | |
| 43 | 0.69 | 73 | 0.80 | |
| Static Parameters | RSSI (dBm) | ||||
|---|---|---|---|---|---|
| Beacon 1 | Beacon 2 | Beacon 3 | Beacon 4 | ||
| Average | With smoke | −70.20 | −75.92 | −78.16 | −79.96 |
| Smokeless | −72.73 | −76.54 | −80.32 | −82.00 | |
| Mode | With smoke | −70 | −75 | −76 | −77 |
| Smokeless | −76 | −73 | −82 | −82 | |
| Median | With smoke | −70 | −75 | −78 | −80 |
| Smokeless | −73 | −76 | −81 | −82 | |
| Maximum | With smoke | −82 | −84 | −85 | −84 |
| Smokeless | −79 | −84 | −84 | −85 | |
| Standard deviation | With smoke | 5.11 | 4.26 | 3.2 | 2.34 |
| Smokeless | 4.07 | 3.89 | 2.7 | 2.04 | |
| Variance | With smoke | 26.08 | 18.16 | 10.56 | 5.46 |
| Smokeless | 16.60 | 15.13 | 6.14 | 4.17 | |
| Complete Video in Teresa | ||||
|---|---|---|---|---|
| Video | Duration | Total Number of Frames | Processing Time | False Positives |
| Complete Video | 8 min: 20 s | 15.000 frames | 42 min | 102 frames 0.68% |
| Clippings of the Video in Teresa. | ||||
| Video | Duration | Total Number of Frames | Processing Time | |
| Without Fire | With Fire | |||
| Clip 1 | 10 s | 300 frames | 1 min: 18 s | 54 s |
| Clip 2 | 30 s | 900 frames | 3 min: 59 s | 2 min: 49 s |
| Clip 3 | 45 s | 1.350 frames | 6 min: 11 s | 4 min: 45 s |
| Clip 4 | 60 s | 1.800 frames | 6 min: 45 s | 6 min: 26 s |
| Video Characteristics | Duration (Min) | Frames (Total Number) | Resolution (Pixels) | Image Type |
|---|---|---|---|---|
| 1:00 | 1.800 | 640 × 512 | Rainbow | |
| Detection metrics | Accuracy (%) | Precision (%) | Recall (%) | F1 Score (%) |
| 0.73 | 0.99 | 0.70 | 0.82 | |
| Processing time | No optional Parameters | With Optional Parameters | ||
| Complete Video (s) | 1 Frame (s) | Complete Video (s) | 1 Frame (s) | |
| 76 | 0.66 | 128 | 0.83 | |
| Point | Firefighter Position on the x-Axis (m) | Position on the y-Axis (m) | Error (m) | Point | Position on the x-Axis (m) | Position on the y-Axis (m) | Error (m) |
|---|---|---|---|---|---|---|---|
| 0 | 0 | 0 | 0 | 9 | 1.195 | 5.652 | 0.165 |
| 1 | 0.548 | 0.582 | 0.012 | 10 | 1.420 | 6.420 | 0.050 |
| 2 | 1.142 | 1.118 | 0.007 | 11 | 1.407 | 7.220 | 0.050 |
| 3 | 1.570 | 1.794 | 0.273 | 12 | 1.369 | 8.019 | 0.100 |
| 4 | 1.097 | 2.439 | 0.218 | 13 | 1.336 | 8.818 | 0.141 |
| 5 | 0.701 | 3.134 | 0.256 | 14 | 1.302 | 9.617 | 0.133 |
| 6 | 0.023 | 3.558 | 0.094 | 15 | 0.697 | 10.141 | 0.036 |
| 7 | 0.423 | 4.251 | 0.330 | 16 | 0.093 | 10.666 | 0.195 |
| 8 | 0.803 | 4.955 | 0.229 | 17 | −0.521 | 11.178 | 0.129 |
| Environmental Parameters | Image Processing for Flame/Fire Focus Detection Thermal Vision | Location Estimation for Navigation and Firefighter Tracking | ||||
|---|---|---|---|---|---|---|
| Navigation and Tracking | Indoor and Simulated | Indoor and Real Scenario Evaluation | Modular | |||
| Our proposal | Yes | Yes | Yes | Yes | Yes | Yes |
| FREAS [11] | No | Yes | No | No | Yes | No |
| “FireBack” [9] | Yes | No/Yes | Only See in the map | No | No | No |
| “A survey” [12] | No | No | Yes | Yes | Yes | |
| CROW [14] | No | No | Yes | No | Yes | No |
| ICA K-medoids [16] | No | Yes, but only with RGB images | No | Only outdoor without smoke | Only outdoor without smoke | No |
| “Accurate” [26] | No | No | Yes | No | Yes | No |
| “Potentialities” [45] | No | Yes/No | No | No | Yes | No |
| SensorFly [46] | Yes | No/Yes | No | Yes | Yes | No |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rodriguez-Sanchez, M.C.; Fernández-Jiménez, L.; Jiménez, A.R.; Vaquero, J.; Borromeo, S.; Lázaro-Galilea, J.L. HelpResponder—System for the Security of First Responder Interventions. Sensors 2021, 21, 2614. https://doi.org/10.3390/s21082614
Rodriguez-Sanchez MC, Fernández-Jiménez L, Jiménez AR, Vaquero J, Borromeo S, Lázaro-Galilea JL. HelpResponder—System for the Security of First Responder Interventions. Sensors. 2021; 21(8):2614. https://doi.org/10.3390/s21082614
Chicago/Turabian StyleRodriguez-Sanchez, M. Cristina, Luis Fernández-Jiménez, Antonio R. Jiménez, Joaquin Vaquero, Susana Borromeo, and Jose L. Lázaro-Galilea. 2021. "HelpResponder—System for the Security of First Responder Interventions" Sensors 21, no. 8: 2614. https://doi.org/10.3390/s21082614