
Meander Thin-Film Biosensor Fabrication to Investigate the Influence of Structural Parameters on the Magneto-Impedance Effect

 , ,
, ,
Abstract
:1. Introduction
2. Materials and Methods
2.1. MI Biosensor Principles and Physical Background
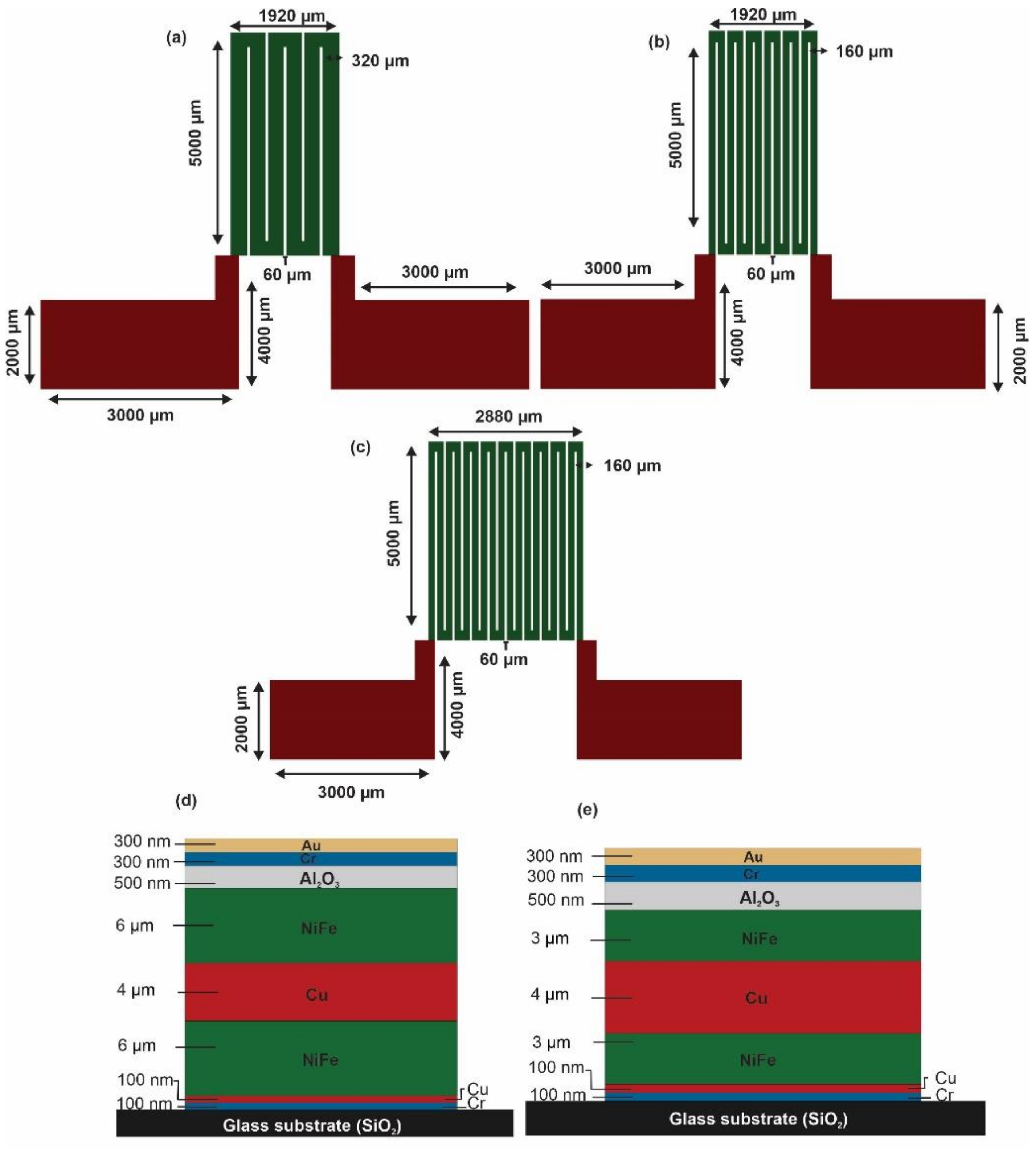
2.2. MI Biosensor Design and Principles
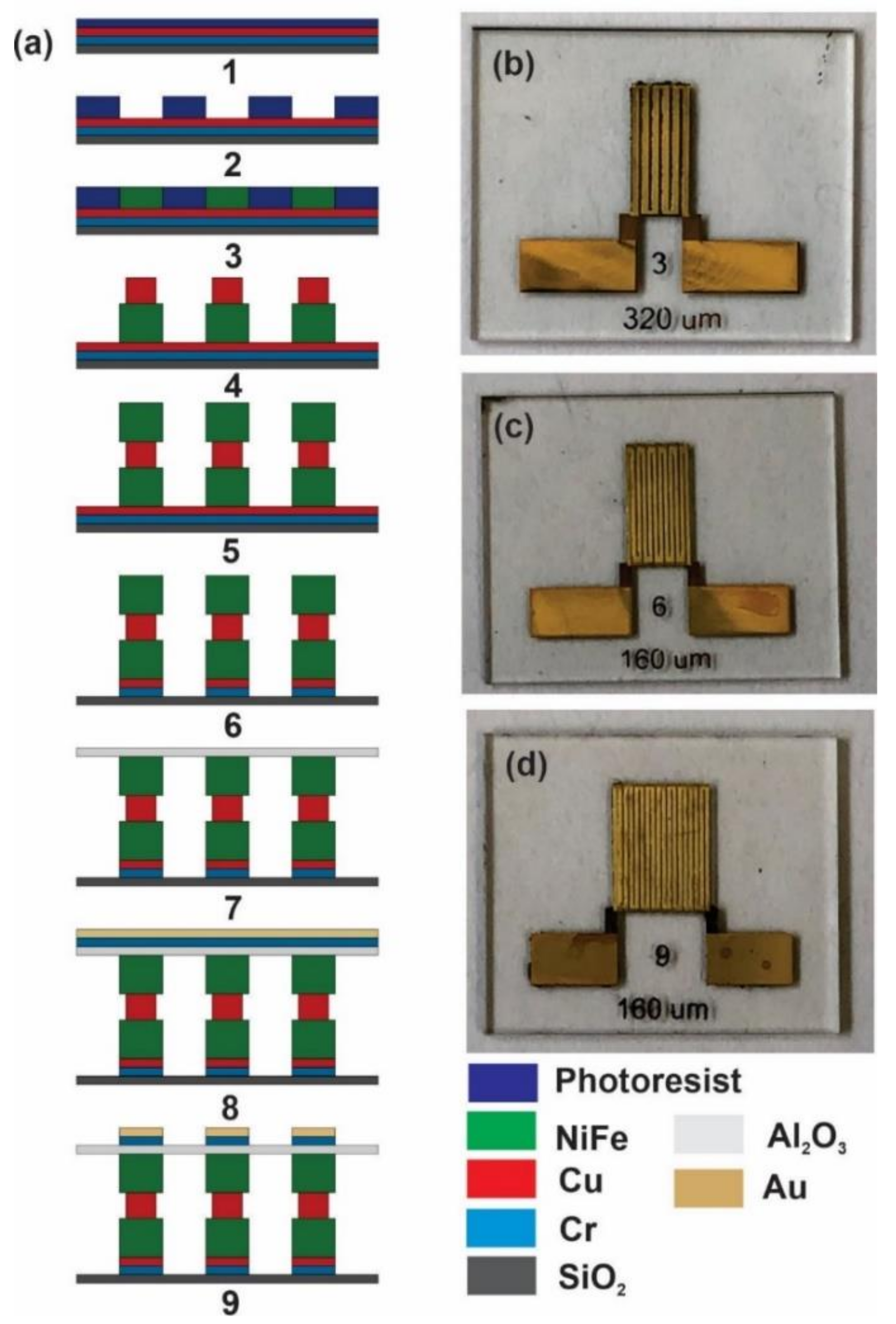
2.3. MI Biosensor Fabrication
2.4. Experimental Setup and Measurement
2.5. Statistical Analysis
3. Results and Discussion
3.1. The Influence of Number of Turns Taken by the Film and the Film Thickness on the MI Response
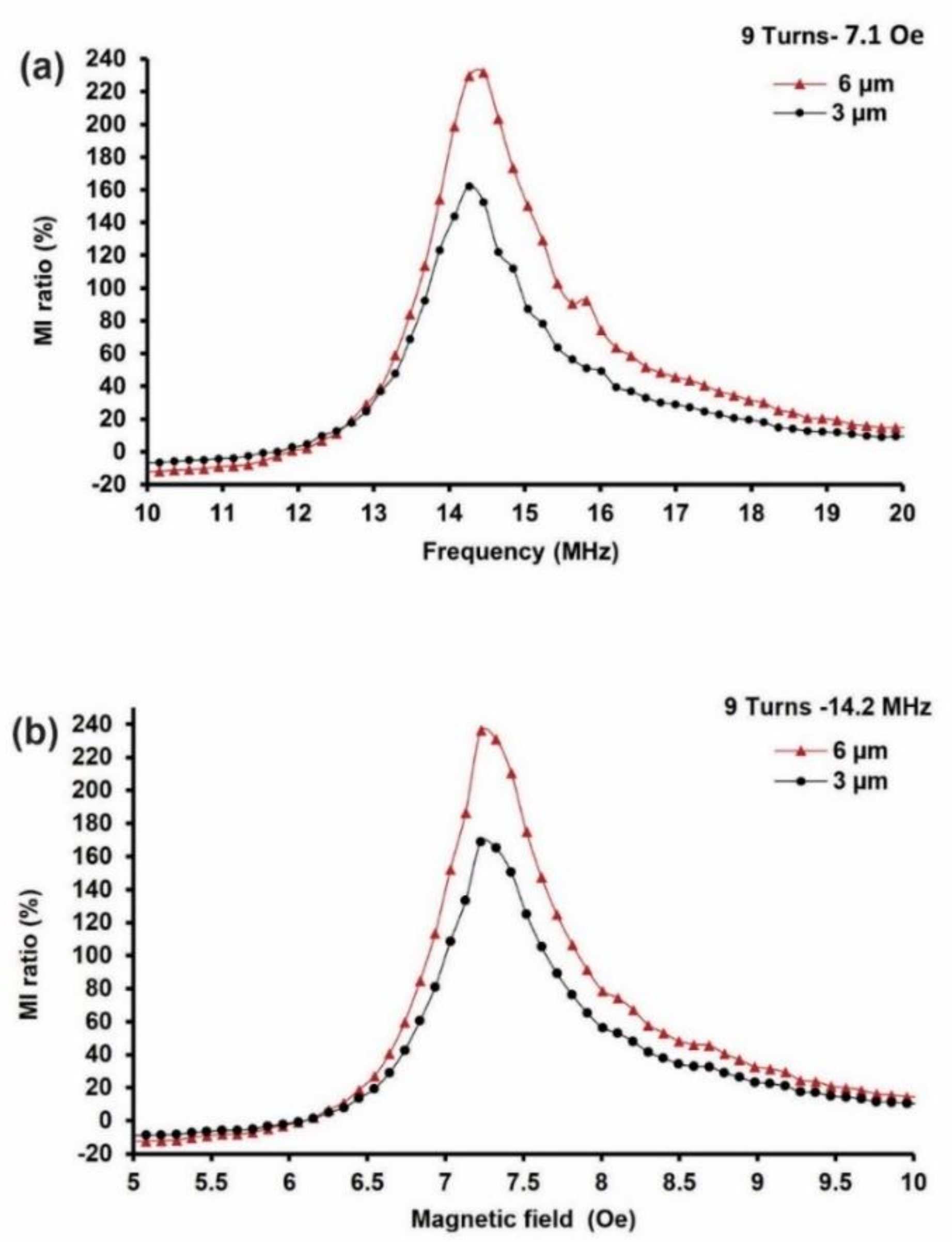
3.1.1. MI Biosensor Configuration—9 Turns
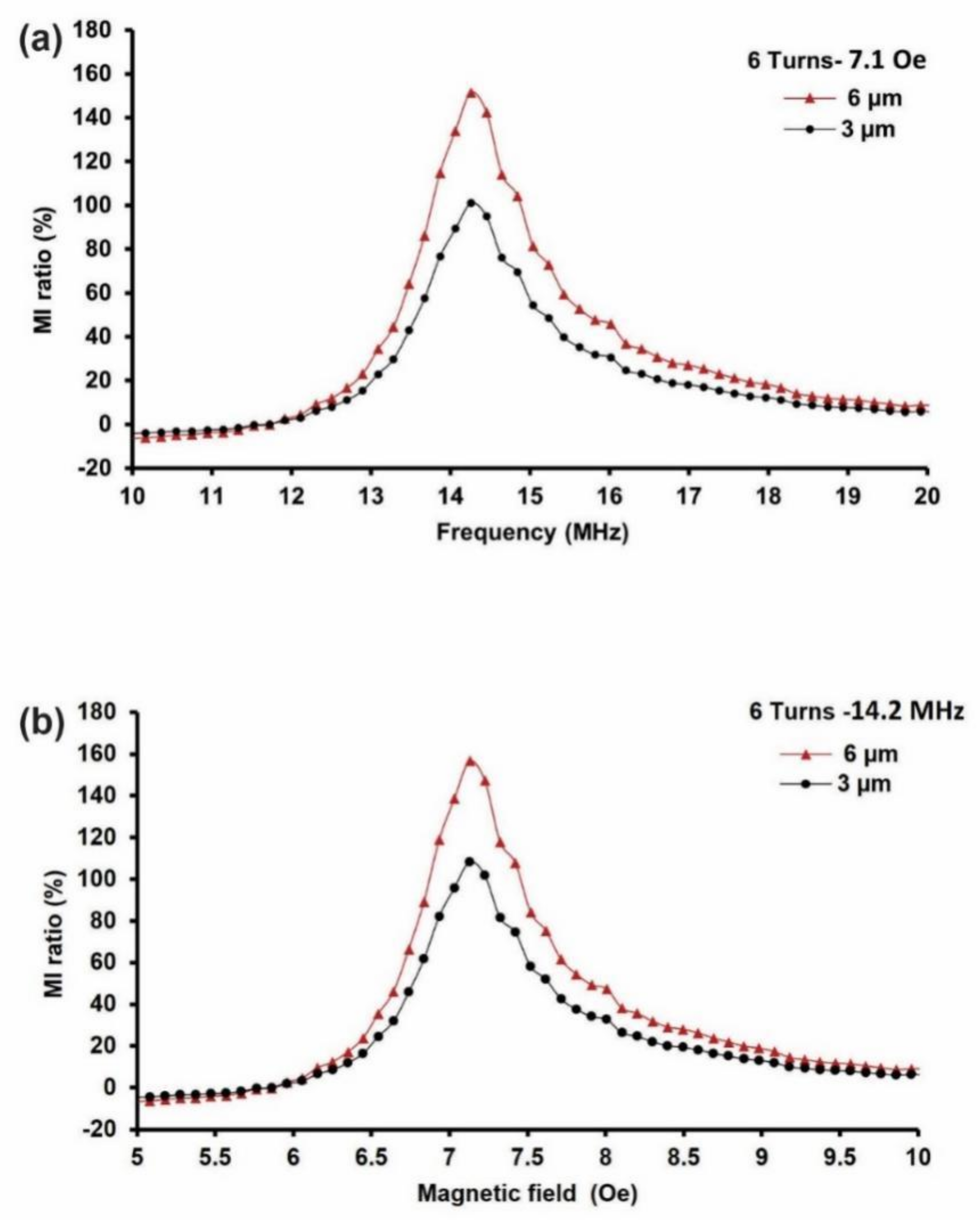
3.1.2. MI Biosensor Configuration—6 Turns
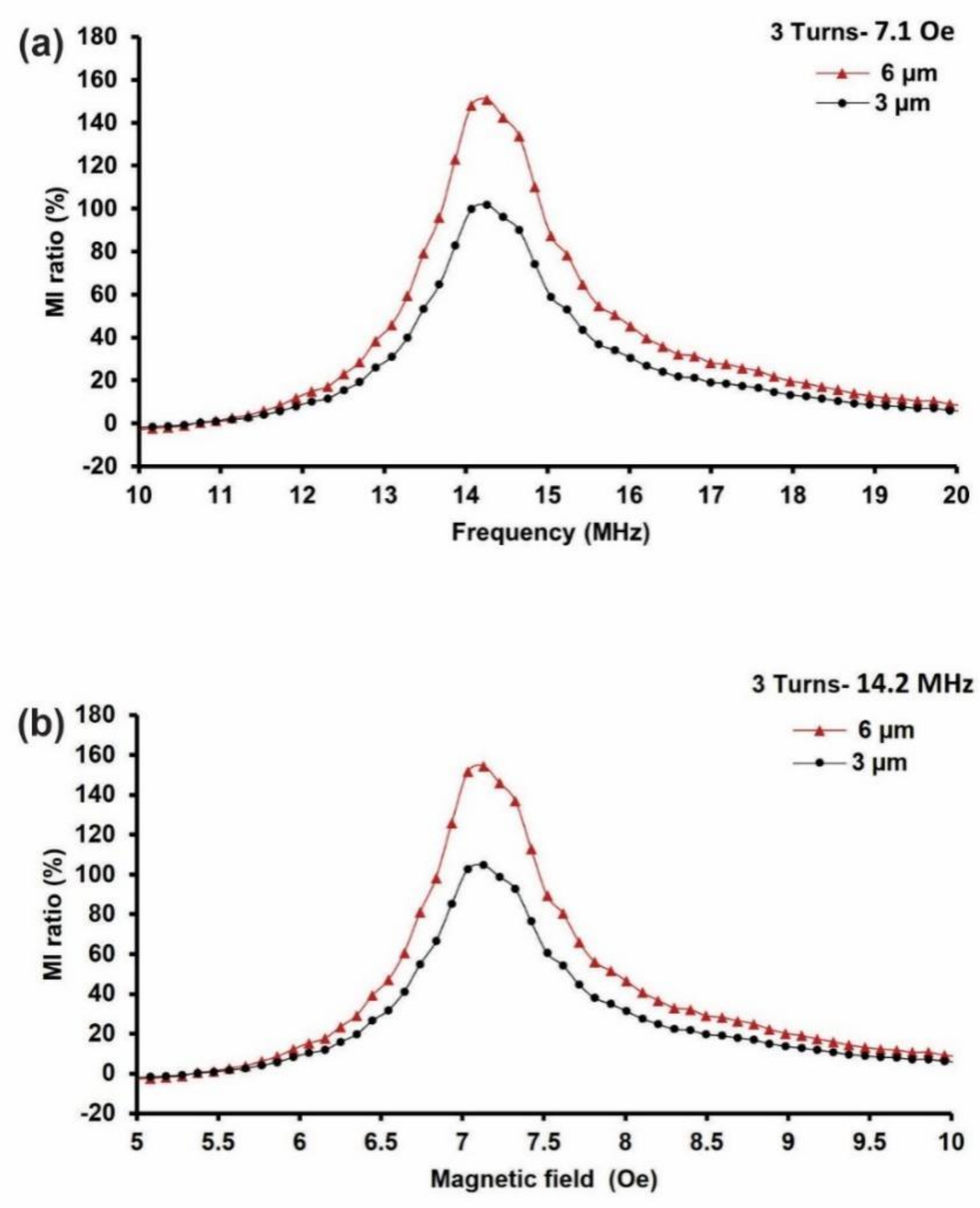
3.1.3. MI Biosensor Configuration—3 Turns
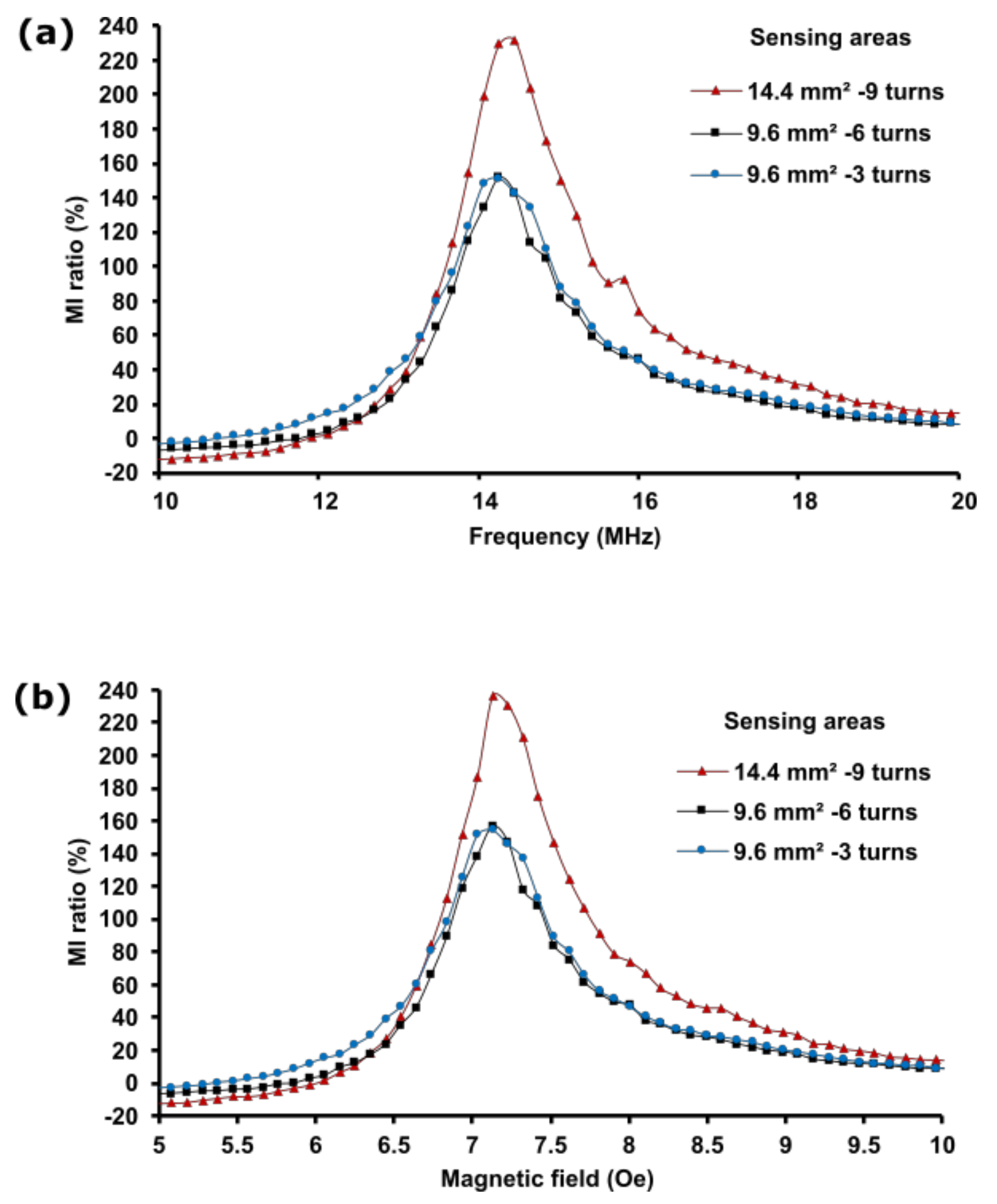
3.2. The Influence of Film Sensing Area Size on the MI Response
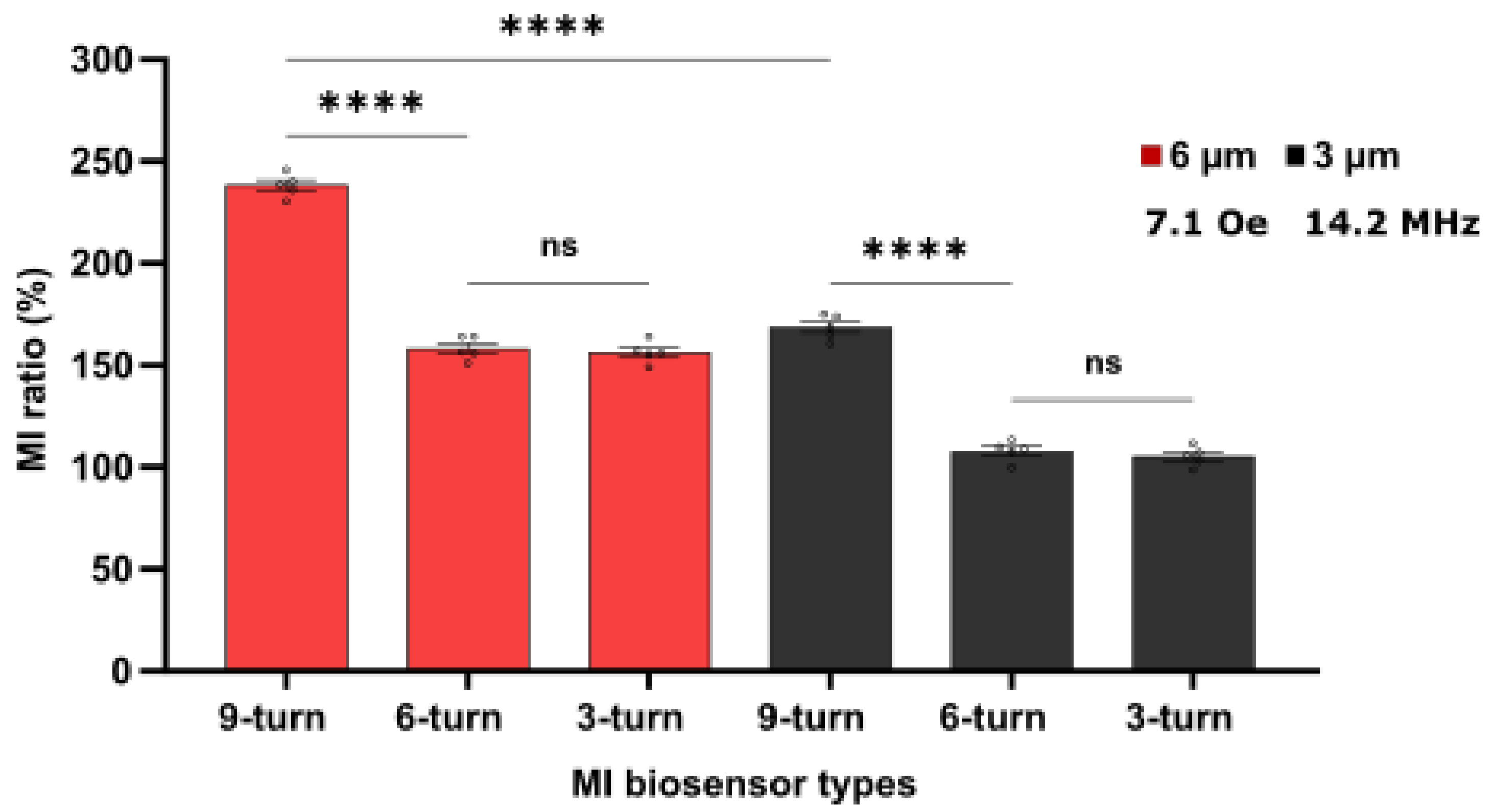
3.3. MI Biosensor Comparison and Reproducibility
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Baselt, D.R.; Lee, G.U.; Natesan, M.; Metzger, S.W.; Sheehan, P.E.; Colton, R.J. A biosensor based on magnetoresistance technology1This paper was awarded the Biosensors & Bioelectronics Award for the most original contribution to the Congress.1. Biosens. Bioelectron. 1998, 13, 731–739. [Google Scholar] [CrossRef] [PubMed]
- Reig, C.; Cubells-Beltrán, M.-D.; Ramírez Muñoz, D. Magnetic Field Sensors Based on Giant Magnetoresistance (GMR) Technology: Applications in Electrical Current Sensing. Sensors 2009, 9, 7919–7942. [Google Scholar] [CrossRef] [PubMed]
- Grimes, C.A.; Mungle, C.S.; Zeng, K.; Jain, M.K.; Dreschel, W.R.; Paulose, M.; Ong, K.G. Wireless Magnetoelastic Resonance Sensors: A Critical Review. Sensors 2002, 2, 294–313. [Google Scholar] [CrossRef] [Green Version]
- Sayad, A.; Skafidas, E.; Kwan, P. Magneto-Impedance Biosensor Sensitivity: Effect and Enhancement. Sensors 2020, 20, 5213. [Google Scholar] [CrossRef] [PubMed]
- Morikawa, T.; Nishibe, Y.; Yamadera, H.; Nonomura, Y.; Takeuchi, M.; Taga, Y. Giant magneto-impedance effect in layered thin films. IEEE Trans. Magn. 1997, 33, 4367–4372. [Google Scholar] [CrossRef]
- Mahdi, A.E.; Panina, L.; Mapps, D. Some new horizons in magnetic sensing: High-Tc SQUIDs, GMR and GMI materials. Sens. Actuators A Phys. 2003, 105, 271–285. [Google Scholar] [CrossRef]
- Prinz, G.A. Magnetoelectronics applications. J. Magn. Magn. Mater. 1999, 200, 57–68. [Google Scholar] [CrossRef]
- Radkovskaya, A.; Rakhmanov, A.A.; Perov, N.; Sheverdyaeva, P.; Antonov, A.S. The thermal and stress effect on GMI in amorphous wires. J. Magn. Magn. Mater. 2002, 249, 113–116. [Google Scholar] [CrossRef]
- Malátek, M.; Ripka, P.; Kraus, L. Temperature offset drift of GMI sensors. Sens. Actuators A Phys. 2008, 147, 415–418. [Google Scholar] [CrossRef] [Green Version]
- Semirov, A.V.; Derevyanko, M.S.; Bukreev, D.A.; Moiseev, A.A.; Kudryavtsev, V.O.; Safronov, A.P. Magnetoimpedance of cobalt-based amorphous ribbons/polymer composites. J. Magn. Magn. Mater. 2016, 415, 97–101. [Google Scholar] [CrossRef]
- Zhang, N.; Xiao, X.; Pang, H. Transition metal (Fe, Co, Ni) fluoride-based materials for electrochemical energy storage. Nanoscale Horiz. 2019, 4, 99–116. [Google Scholar] [CrossRef]
- Panina, L.; Mohri, K. Magneto-impedance effect in amorphous wires. Appl. Phys. Lett. 1994, 65, 1189–1191. [Google Scholar] [CrossRef]
- Favieres, C.; Aroca, C.; Sanchez, M.; Rao, K.; Madurga, V. Giant magnetoimpedance in twisted amorphous CoP multilayers electrodeposited onto Cu wires. J. Magn. Magn. Mater. 1999, 196, 224–226. [Google Scholar] [CrossRef]
- Issadore, D.; Park, Y.; Shao, H.; Min, C.; Lee, K.; Liong, M.; Weissleder, R.; Lee, H. Magnetic sensing technology for molecular analyses. Lab A Chip 2014, 14, 2385–2397. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lin, G.; Makarov, D.; Schmidt, O.G. Magnetic sensing platform technologies for biomedical applications. Lab A Chip 2017, 17, 1884–1912. [Google Scholar] [CrossRef] [PubMed]
- Phan, M.-H.; Peng, H.-X. Giant magnetoimpedance materials: Fundamentals and applications. Prog. Mater. Sci. 2008, 53, 323–420. [Google Scholar] [CrossRef]
- Sugita, Y.; Fujiwara, H.; Sato, T. Critical Thickness And Perpendicular Anisotropy Of Evaporated Permalloy Films With Stripe Domains. Appl. Phys. Lett. 1967, 10, 229–231. [Google Scholar] [CrossRef]
- Wicaksono, B.A.; Nuryani, N.; Purnama, B. Magneto-impedance Effects in Electrodeposited Multi-layer [NiFe/Cu] 3 on Cu Wire Substrates for kHz-order Frequency Measurements. J. Magn. Its Appl. 2021, 1, 9–12. [Google Scholar]
- Coïsson, M.; Vinai, F.; Tiberto, P.; Celegato, F. Magnetic properties of FeSiB thin films displaying stripe domains. J. Magn. Magn. Mater. 2009, 321, 806–809. [Google Scholar] [CrossRef]
- Vázquez, M. Soft magnetic wires. Phys. B Condens. Matter 2001, 299, 302–313. [Google Scholar] [CrossRef]
- Vázquez, M. Giant magneto-impedance in soft magnetic “Wires”. J. Magn. Magn. Mater. 2001, 226–230, 693–699. [Google Scholar] [CrossRef]
- Chen, L.; Bao, C.-C.; Yang, H.; Li, D.; Lei, C.; Wang, T.; Hu, H.-Y.; He, M.; Zhou, Y.; Cui, D.-X. A prototype of giant magnetoimpedance-based biosensing system for targeted detection of gastric cancer cells. Biosens. Bioelectron. 2011, 26, 3246–3253. [Google Scholar] [CrossRef] [PubMed]
- Wang, T.; Yang, Z.; Lei, C.; Lei, J.; Zhou, Y. Quantitative determination of magnetic beads using a magnetoimpedance-based lab-on-a-chip platform. J. Appl. Phys. 2014, 115, 223901. [Google Scholar] [CrossRef]
- Corrêa, M.; Viegas, A.; Da Silva, R.; de Andrade, A.; Sommer, R. Magnetoimpedance of single and multilayered FeCuNbSiB films in frequencies up to 1.8 GHz. J. Appl. Phys. 2007, 101, 043905. [Google Scholar] [CrossRef]
- Kurlyandskaya, G.; Svalov, A.; Fernandez, E.; Garcia-Arribas, A.; Barandiaran, J. FeNi-based magnetic layered nanostructures: Magnetic properties and giant magnetoimpedance. J. Appl. Phys. 2010, 107, 09C502. [Google Scholar] [CrossRef]
- Morikawa, T.; Nishibe, Y.; Yamadera, H.; Nonomura, Y.; Takeuchi, M.; Sakata, J.; Taga, Y. Enhancement of giant magneto-impedance in layered film by insulator separation. IEEE Trans. Magn. 1996, 32, 4965–4967. [Google Scholar] [CrossRef]
- Antonov, A.; Gadetsky, S.; Granovsky, A.; D’Yatckov, A.; Sedova, M.; Perov, N.; Usov, N.; Furmanova, T.; Lagar’kov, A. High-frequency giant magneto-impedance in multilayered magnetic films. Phys. A Stat. Mech. Appl. 1997, 241, 414–419. [Google Scholar] [CrossRef]
- Kikuchi, H.; Oe, S.; Uetake, H.; Yabukami, S.; Nakai, T.; Hashi, S.; Ishiyama, K. Enhancement of sensitivity on miniaturized thin-film magnetoimpedance with ellipsoidal element. Phys. Procedia 2015, 75, 1271–1278. [Google Scholar] [CrossRef] [Green Version]
- Wang, T.; Yang, Z.; Lei, C.; Lei, J.; Zhou, Y. An integrated giant magnetoimpedance biosensor for detection of biomarker. Biosens. Bioelectron. 2014, 58, 338–344. [Google Scholar] [CrossRef]
- Hika, K.; Panina, L.; Mohri, K. Magneto-impedance in sandwich film for magnetic sensor heads. IEEE Trans. Magn. 1996, 32, 4594–4596. [Google Scholar] [CrossRef]
- Fernández, E.; Kurlyandskaya, G.V.; García-Arribas, A.; Svalov, A.V. Nanostructured giant magneto-impedance multilayers deposited onto flexible substrates for low pressure sensing. Nanoscale Res. Lett. 2012, 7, 230. [Google Scholar] [CrossRef] [Green Version]
- Senda, M.; Ishii, O.; Koshimoto, Y.; Toshima, T. Thin-film magnetic sensor using high frequency magneto-impedance (HFMI) effect. IEEE Trans. Magn. 1994, 30, 4611–4613. [Google Scholar] [CrossRef]
- Jiang, J.F.; Jin, F.; Yang, B.; Xu, L.; Dong, K.F.; Song, J.L.; Mo, W.Q.; Hui, Y.J. Effect of Meander Structure on Magnetoimpedance Characteristics in FeNi/Cu/FeNi Films. IEEE Trans. Magn. 2021, 1. [Google Scholar] [CrossRef]
- Kurlyandskaya, G.; Yakabchuk, H.; Kisker, E.; Bebenin, N.; Garcıa-Miquel, H.; Vázquez, M.; Vas’ kovskiy, V. Very large magnetoimpedance effect in FeCoNi ferromagnetic tubes with high order magnetic anisotropy. J. Appl. Phys. 2001, 90, 6280–6286. [Google Scholar] [CrossRef] [Green Version]
- Vilela, G.L.S.; Monsalve, J.G.; Rodrigues, A.R.; Azevedo, A.; Machado, F.L.A. Giant magnetoimpedance effect in a thin-film multilayer meander-like sensor. J. Appl. Phys. 2017, 121, 124501. [Google Scholar] [CrossRef]
- Chen, L.; Zhou, Y.; Lei, C.; Zhou, Z.-M. Giant magnetoimpedance effect and voltage response in meander shape Co-based ribbon. Appl. Phys. A 2010, 98, 861–865. [Google Scholar] [CrossRef]
- Wang, T.; Zhou, Y.; Lei, C.; Lei, J.; Yang, Z. Development of an ingenious method for determination of Dynabeads protein A based on a giant magnetoimpedance sensor. Sens. Actuators B Chem. 2013, 186, 727–733. [Google Scholar] [CrossRef]
- Wang, T.; Lei, C.; Lei, J.; Yang, Z.; Zhou, Y. Preparation of meander thin-film microsensor and investigation the influence of structural parameters on the giant magnetoimpedance effect. Appl. Phys. A 2012, 109, 205–211. [Google Scholar] [CrossRef]
- García-Arribas, A.; Fernández, E.; Svalov, A.V.; Kurlyandskaya, G.V.; Barrainkua, A.; Navas, D.; Barandiaran, J.M. Tailoring the magnetic anisotropy of thin film permalloy microstrips by combined shape and induced anisotropies. Eur. Phys. J. B 2013, 86, 136. [Google Scholar] [CrossRef]
- Makhnovskiy, D.; Panina, L. Size effect on magneto-impedance in layered films. Sens. Actuators A Phys. 2000, 81, 91–94. [Google Scholar] [CrossRef]
- Kittel, C. Theory of the Dispersion of Magnetic Permeability in Ferromagnetic Materials at Microwave Frequencies. Phys. Rev. 1946, 70, 281–290. [Google Scholar] [CrossRef] [Green Version]
- García-Arribas, A.; Fernández, E.; Cos, D.d. Thin-Film Magneto-Impedance Sensors. In Magnetic Sensors–Development Trends and Applications; InTech: Zagreb, Croatia, 2017. [Google Scholar] [CrossRef] [Green Version]
- Yang, Z.; Sun, X.-c.; Wang, T.; Lei, C.; Liu, Y.; Zhou, Y.; Lei, J. A giant magnetoimpedance-based biosensor for sensitive detection of Escherichia coli O157: H7. Biomed. Microdevices 2015, 17, 5. [Google Scholar] [CrossRef]
- Yang, Z.; Wang, H.; Dong, X.; Yan, H.; Lei, C.; Luo, Y. Giant magnetoimpedance based immunoassay for cardiac biomarker myoglobin. Anal. Methods 2017, 9, 3636–3642. [Google Scholar] [CrossRef]
- Yang, Z.; Lei, C.; Zhou, Y.; Liu, Y.; Sun, X.-c. A GMI biochip platform based on Co-based amorphous ribbon for the detection of magnetic Dynabeads. Anal. Methods 2015, 7, 6883–6889. [Google Scholar] [CrossRef]
- Wang, T.; Zhou, Y.; Lei, C.; Lei, J.; Yang, Z. Ultrasensitive detection of Dynabeads protein A using the giant magnetoimpedance effect. Microchim. Acta 2013, 180, 1211–1216. [Google Scholar] [CrossRef]
- Wang, T.; Yang, Z.; Lei, C.; Lei, J.; Zhou, Y. A giant magnetoimpedance sensor for sensitive detection of streptavidin-coupled Dynabeads. Phys. status solidi 2014, 211, 1389–1394. [Google Scholar] [CrossRef]
- Yang, Z.; Liu, Y.; Lei, C.; Sun, X.-C.; Zhou, Y. A flexible giant magnetoimpedance-based biosensor for the determination of the biomarker C-reactive protein. Microchim. Acta 2015, 182, 2411–2417. [Google Scholar] [CrossRef]
- García-Arribas, A.; Fernández, E.; Svalov, A.; Kurlyandskaya, G.; Barandiaran, J. Thin-film magneto-impedance structures with very large sensitivity. J. Magn. Magn. Mater. 2016, 400, 321–326. [Google Scholar] [CrossRef]
- Zhu, Y.; Zhang, Q.; Li, X.; Pan, H.; Wang, J.; Zhao, Z. Detection of AFP with an ultra-sensitive giant magnetoimpedance biosensor. Sens. Actuators B Chem. 2019, 293, 53–58. [Google Scholar] [CrossRef]
- Feng, Z.; Zhi, S.; Guo, L.; Zhou, Y.; Lei, C. An integrated magnetic microfluidic chip for rapid immunodetection of the prostate specific antigen using immunomagnetic beads. Microchim. Acta 2019, 186, 252. [Google Scholar] [CrossRef] [PubMed]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Composition | Content |
|---|---|
| Nickel (II) sulfate (NiSO4·6H2O) | 200 g/L |
| Iron (II) sulfate (FeSO4·7H2O) | 8 g L−1 |
| Nickel (II) chloride (NiCl2·6H2O) | 5 g L−1 |
| Boric acid (H3BO3) | 25 g L−1 |
| Saccharin (C7H5NO3S) | 3 g L−1 |
| PH | 2.5–3.0 |
| Temperature | 20–30 °C |
| Composition | Content |
|---|---|
| Copper (II) sulphate (CuSO4) | 350 g L−1 |
| Sulfuric acid (H2SO4) | 30 mL L−1 |
| Chloride acidic PEG | 5 g L−1 |
| PH | 2.5–3.0 |
| Temperature | 20–30 °C |
| Film Thickness | MI Response | ||
|---|---|---|---|
| 3-Turn (9.6 mm2) | 6-Turn (9.6 mm2) | 9-Turn (14.4 mm2) | |
| 3 µm | 105% | 108% | 168% |
| 6 µm | 155% | 157% | 238% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sayad, A.; Uddin, S.M.; Chan, J.; Skafidas, E.; Kwan, P. Meander Thin-Film Biosensor Fabrication to Investigate the Influence of Structural Parameters on the Magneto-Impedance Effect. Sensors 2021, 21, 6514. https://doi.org/10.3390/s21196514
Sayad A, Uddin SM, Chan J, Skafidas E, Kwan P. Meander Thin-Film Biosensor Fabrication to Investigate the Influence of Structural Parameters on the Magneto-Impedance Effect. Sensors. 2021; 21(19):6514. https://doi.org/10.3390/s21196514
Chicago/Turabian StyleSayad, Abkar, Shah Mukim Uddin, Jianxiong Chan, Efstratios Skafidas, and Patrick Kwan. 2021. "Meander Thin-Film Biosensor Fabrication to Investigate the Influence of Structural Parameters on the Magneto-Impedance Effect" Sensors 21, no. 19: 6514. https://doi.org/10.3390/s21196514