

A Novel Screen-Printed Textile Interface for High-Density Electromyography Recording
 , , ,
, , ,  , ,
, ,  and
and 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
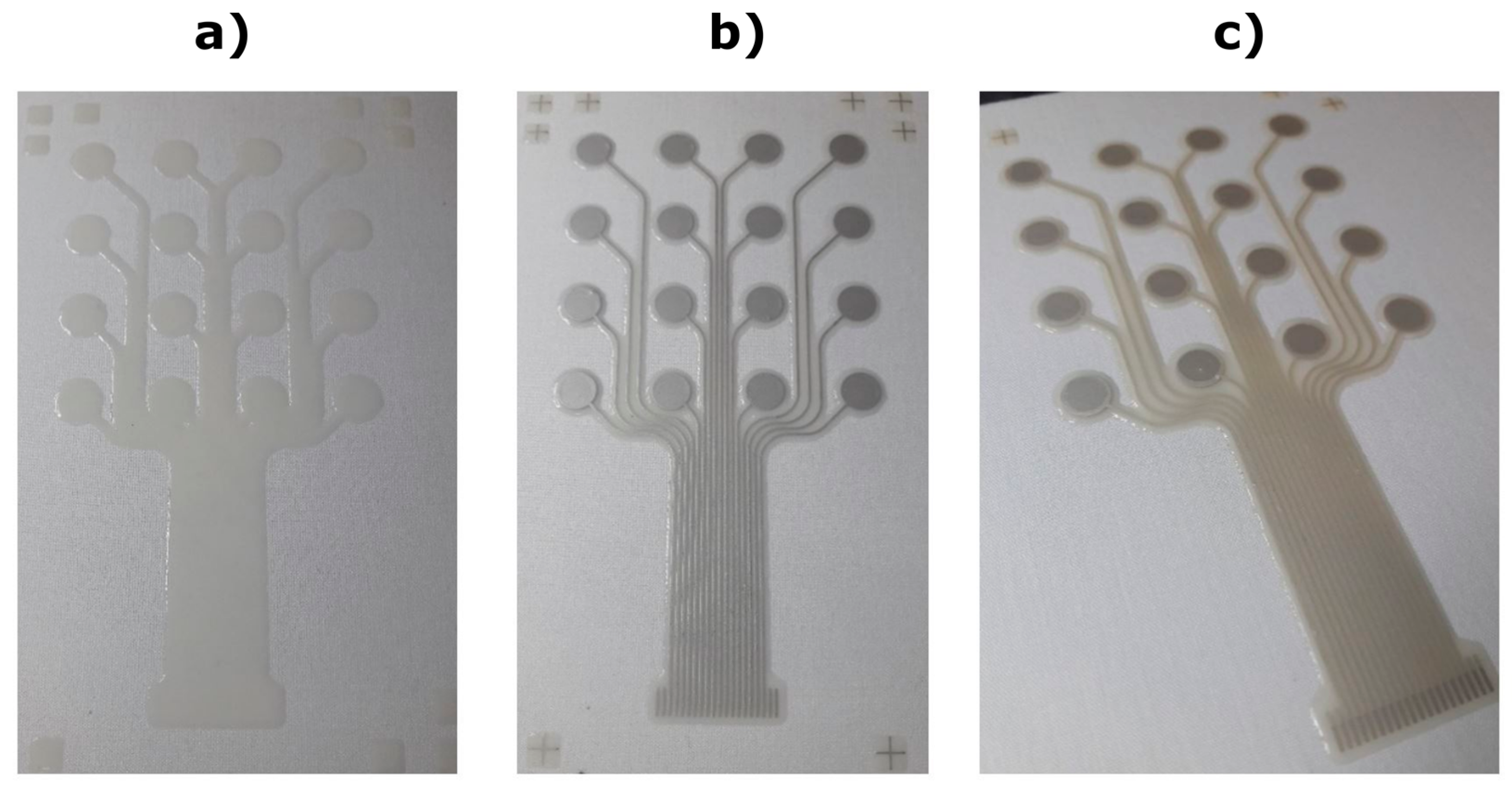
2.1. Electrode Fabrication
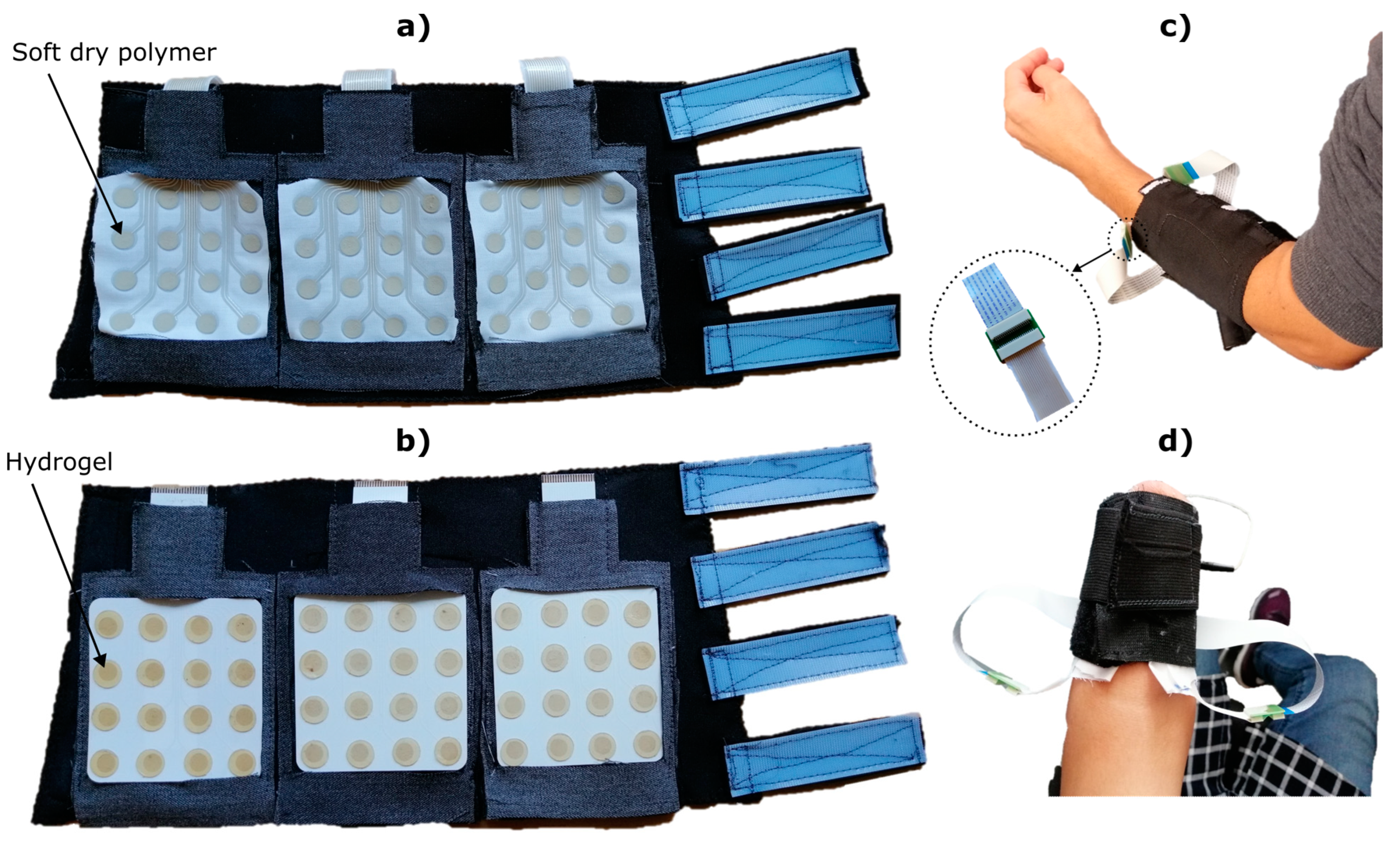
2.1.1. Textile Electrode
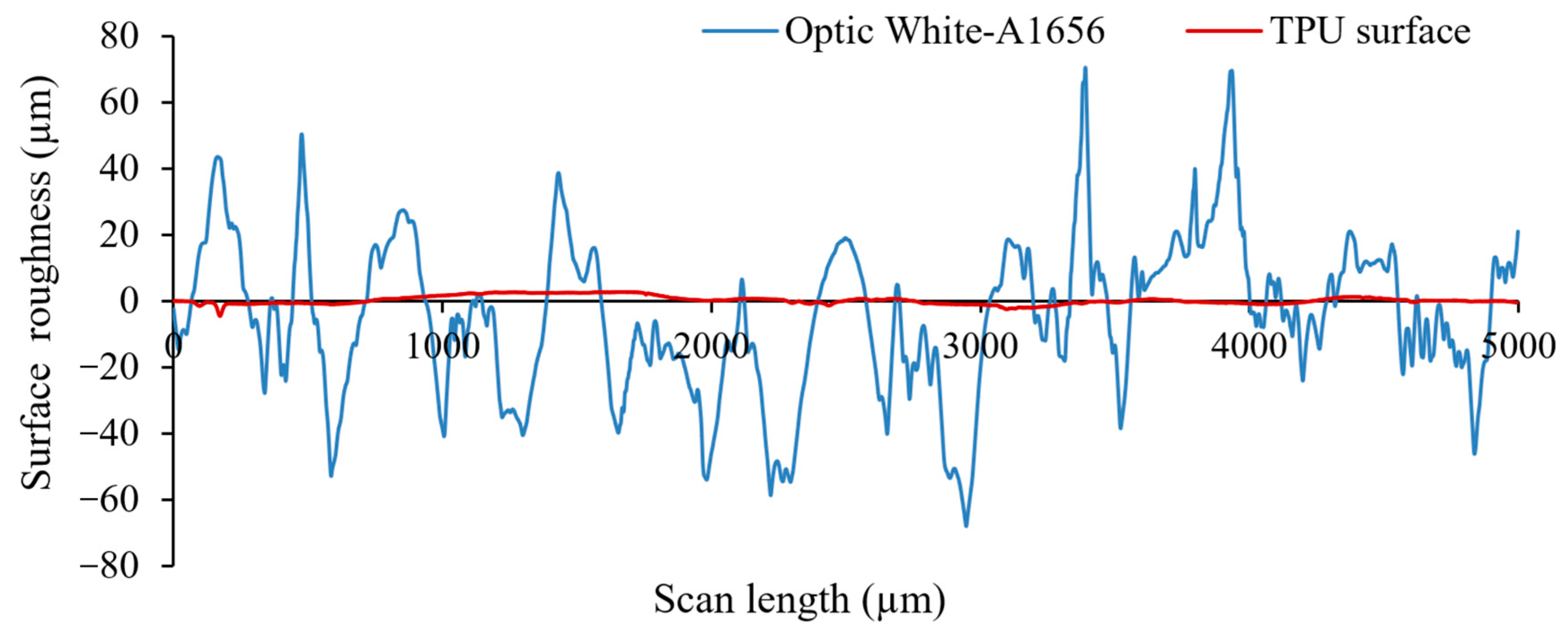
- Surface roughness measurements
- Electrode-skin interface
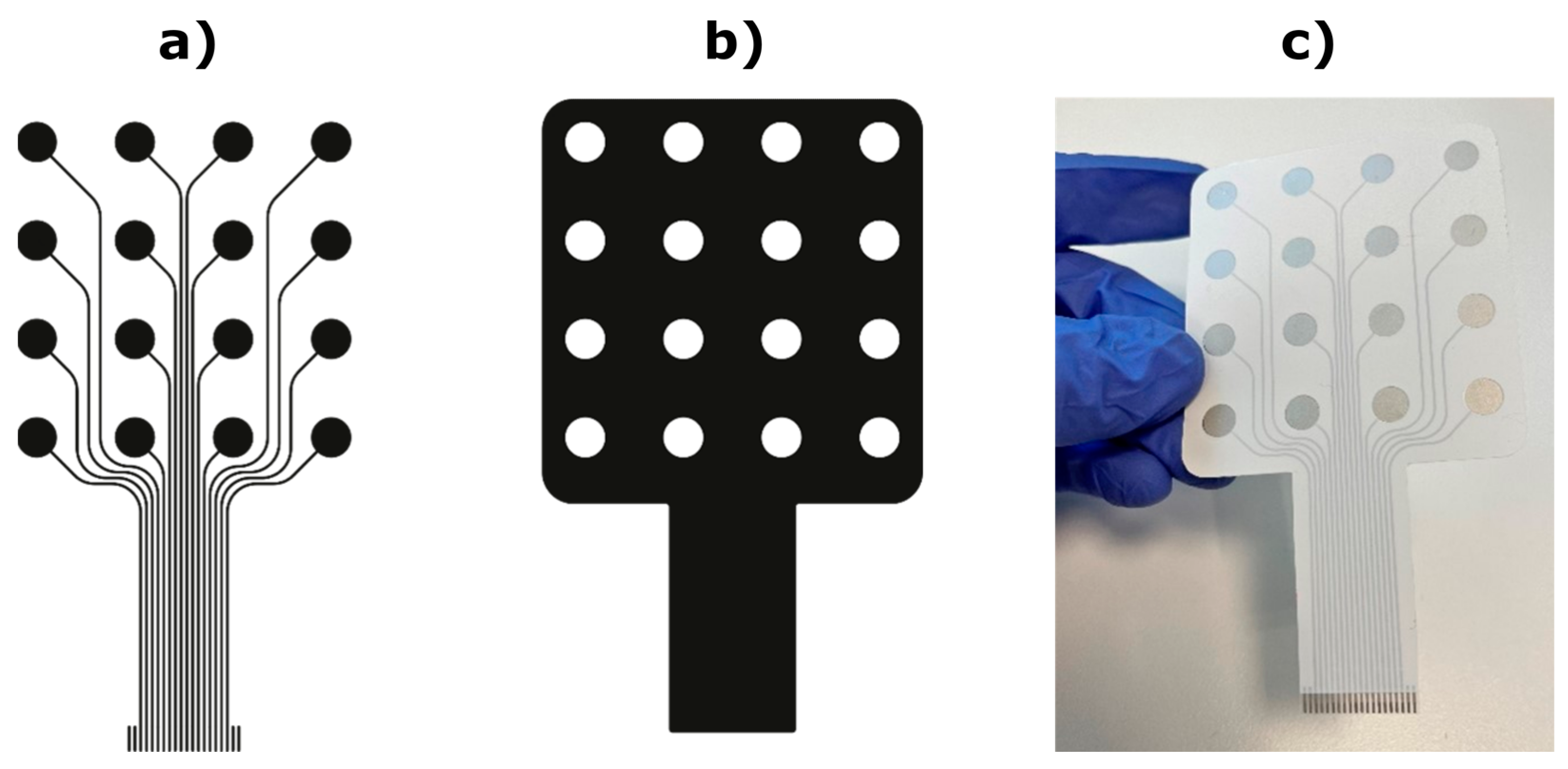
2.1.2. PET Electrode
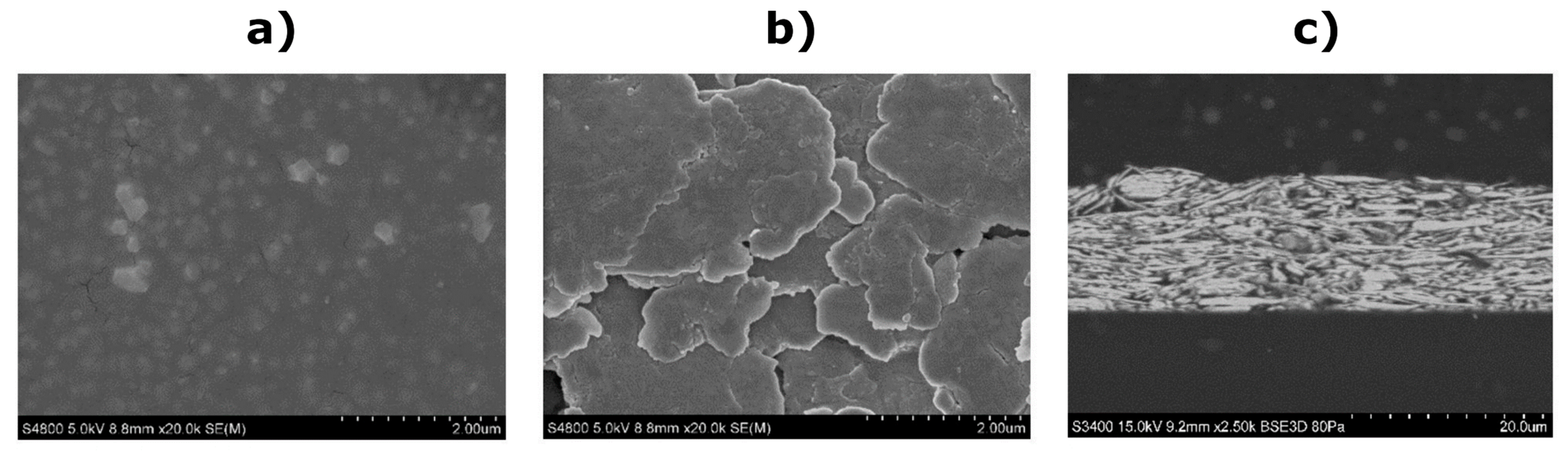
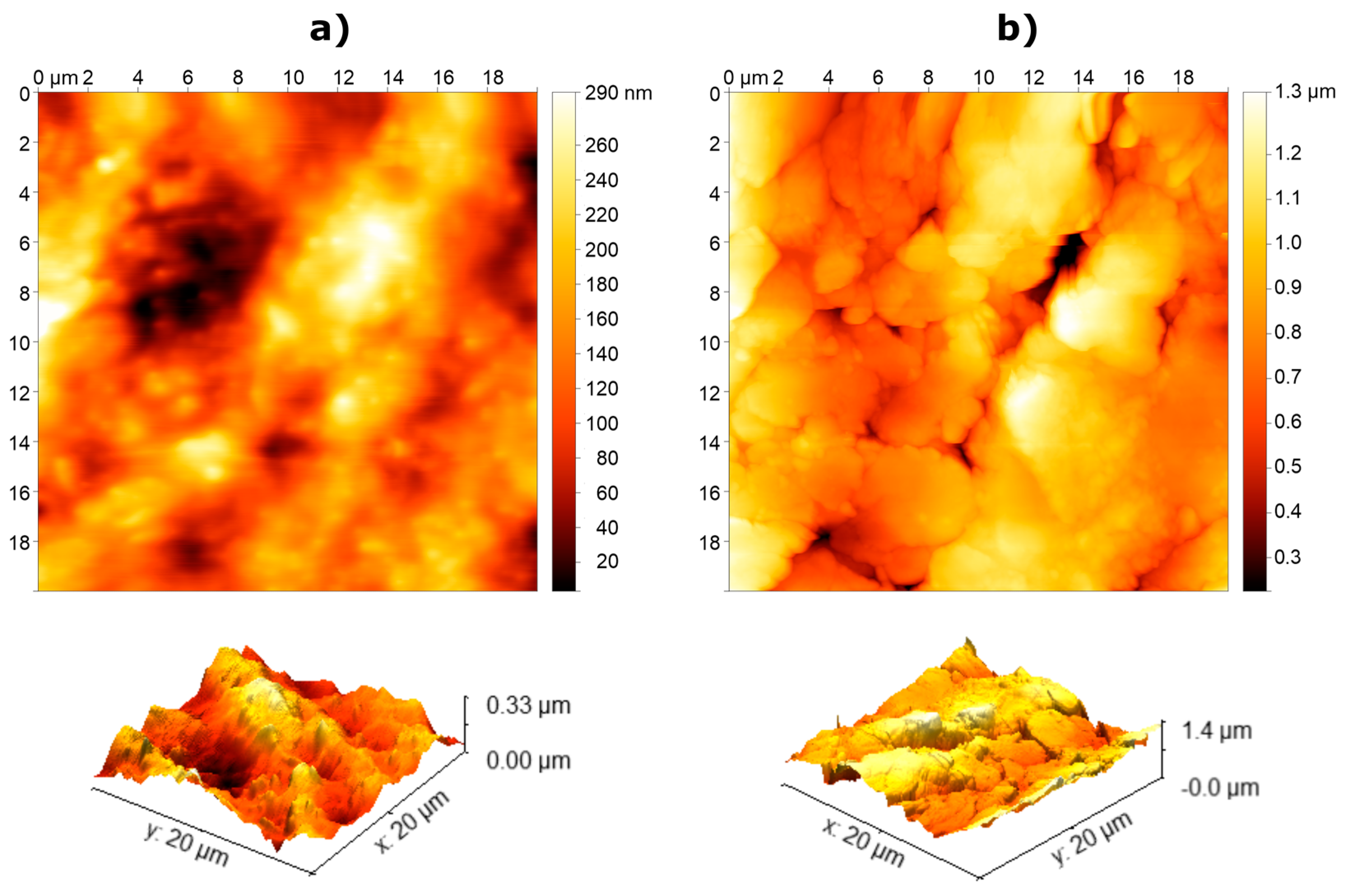
- Scanning electron microscopy characterization
- Atomic force microscopy measurements
2.2. Electrode Assessment and Comparison
2.2.1. EMG Recording
2.2.2. Online Control
2.3. Data Analysis
2.3.1. EMG Signal Quality
2.3.2. Offline and Online Classification Performance
3. Results
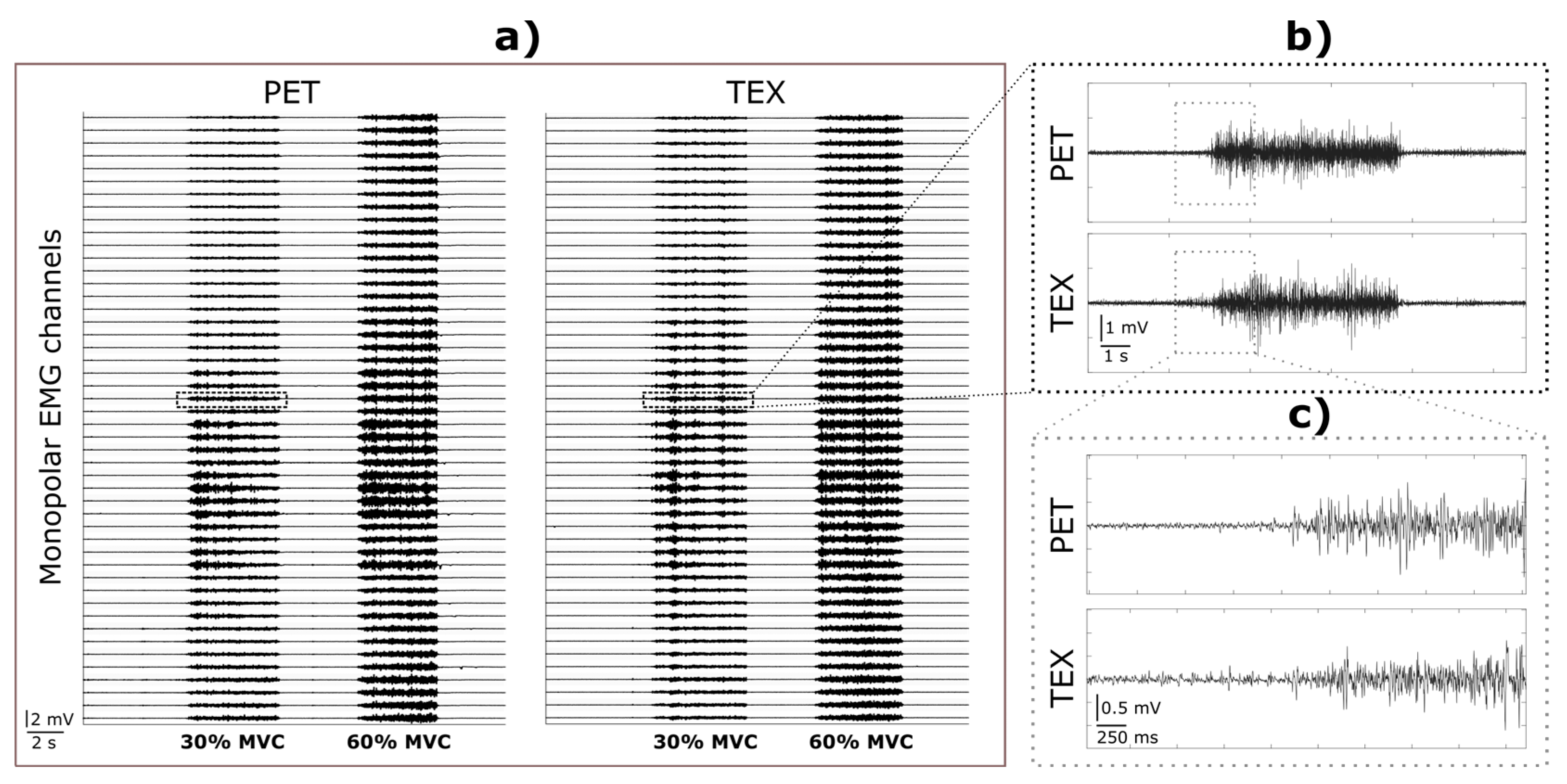
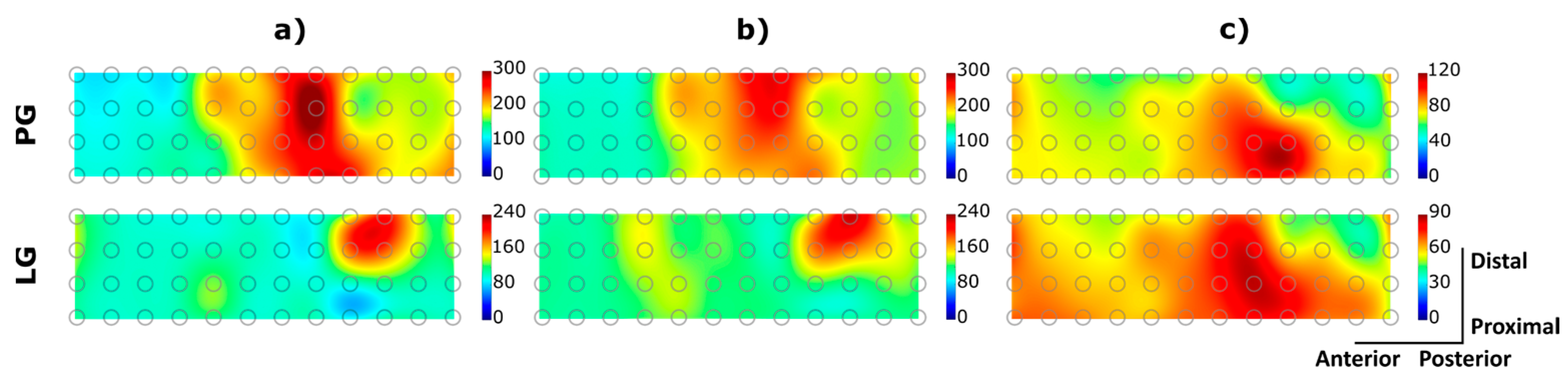
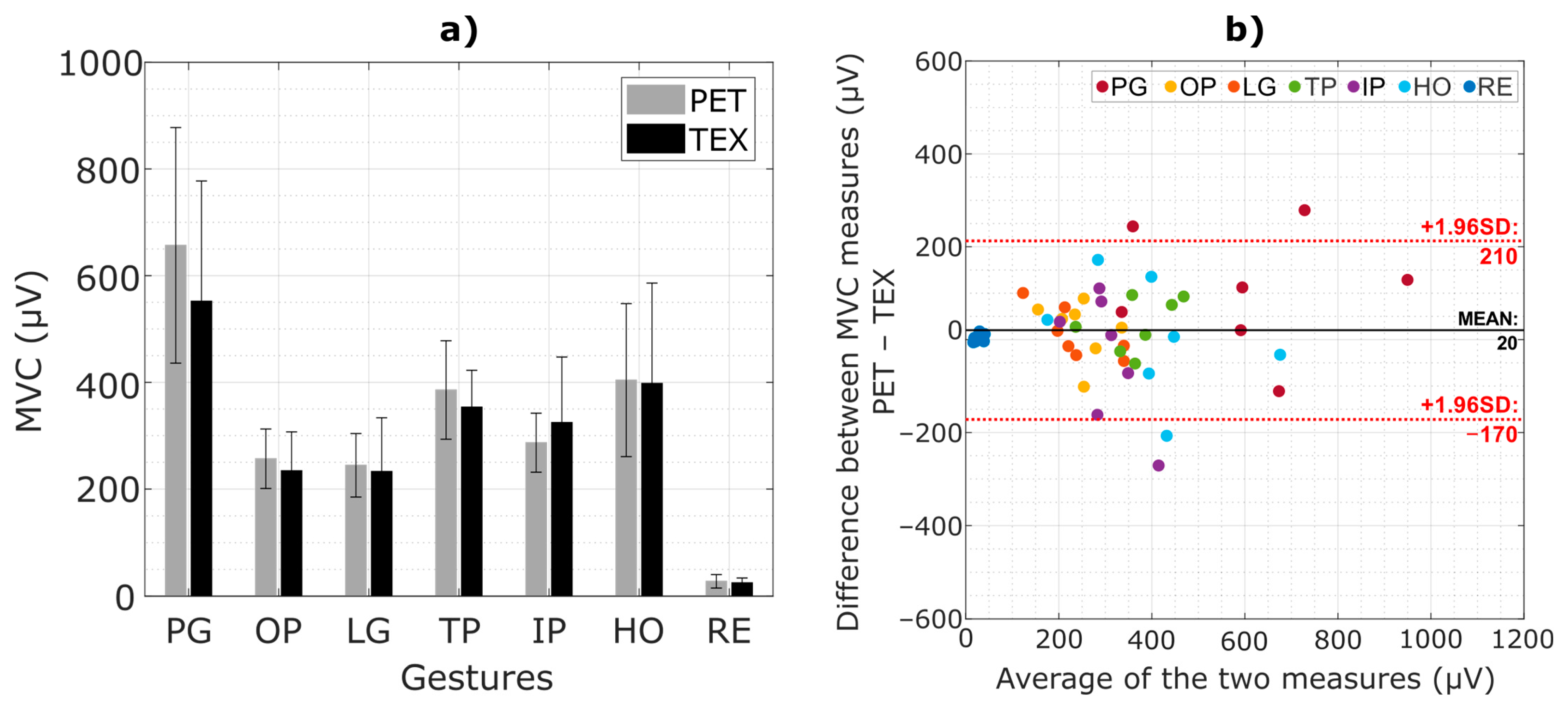
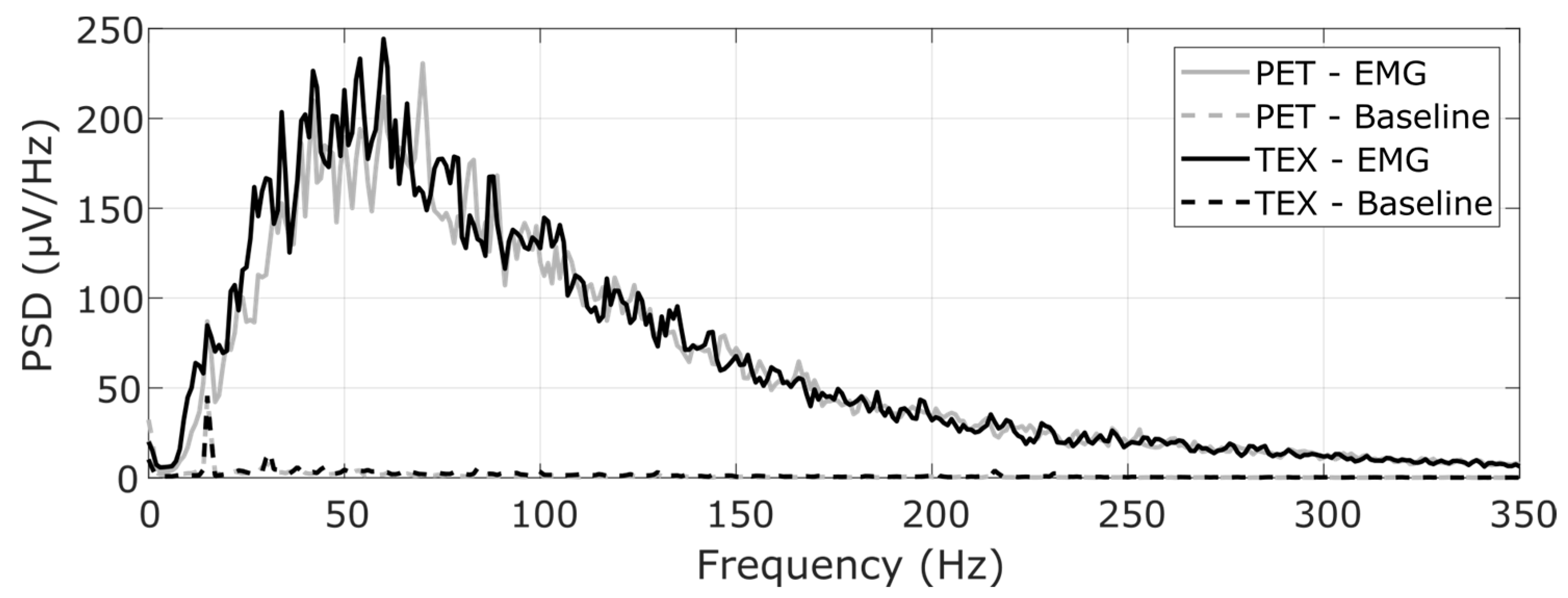
3.1. EMG Signal Detection
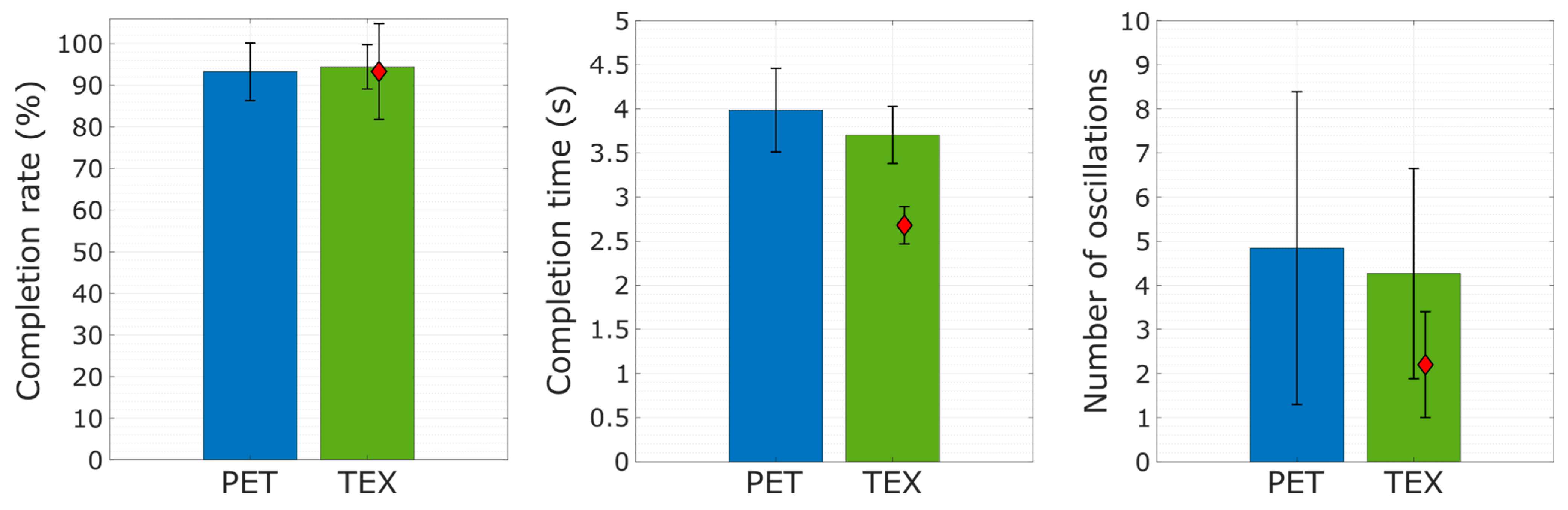
3.2. Gesture Recognition
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Vujaklija, I.; Roche, A.D.; Hasenoehrl, T.; Sturma, A.; Amsuess, S.; Farina, D.; Aszmann, O.C. Translating research on myoelectric control into clinics—Are the performance assessment methods adequate? Front. Neurorobot. 2017, 11, 7. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Patel, G.K.; Castellini, C.; Hahne, J.M.; Farina, D.; Dosen, S. A classification method for myoelectric control of hand prostheses inspired by muscle coordination. IEEE Trans. Neural Syst. Rehabil. Eng. 2018, 26, 1745–1755. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Acar, G.; Ozturk, O.; Golparvar, A.J.; Elboshra, T.A.; Böhringer, K.; Yapici, M.K. Wearable and flexible textile electrodes for biopotential signal monitoring: A review. Electronics 2019, 8, 479. [Google Scholar] [CrossRef] [Green Version]
- Li, G.; Wang, S.; Duan, Y.Y. Towards gel-free electrodes: A systematic study of electrode-skin impedance. Sens. Actuators B Chem. 2017, 241, 1244–1255. [Google Scholar] [CrossRef]
- Besomi, M.; Hodges, P.W.; Van Dieën, J.; Carson, R.G.; Clancy, E.A.; Disselhorst-Klug, C.; Holobar, A.; Hug, F.; Kiernan, M.C.; Lowery, M.; et al. Consensus for Experimental Design in Electromyography (CEDE) project: Electrode selection matrix. J. Electromyogr. Kinesiol. 2019, 48, 128–144. [Google Scholar] [CrossRef] [Green Version]
- Merletti, R.; Muceli, S. Tutorial. Surface EMG detection in space and time: Best practices. J. Electromyogr. Kinesiol. 2019, 49, 102363. [Google Scholar] [CrossRef]
- Fu, Y.; Zhao, J.; Dong, Y.; Wang, X. Dry electrodes for human bioelectrical signal monitoring. Sensors 2020, 20, 3651. [Google Scholar] [CrossRef]
- Ting, J.; Farina, D.; Weber, D.J.; Del Vecchio, A.; Friedenberg, D.; Liu, M.; Schoenewald, C.; Sarma, D.; Collinger, J.; Colachis, S.; et al. A wearable neural interface for detecting and decoding attempted hand movements in a person with tetraplegia. In Proceedings of the 41st Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Berlin, Germany, 23–27 July 2019; pp. 1930–1933. [Google Scholar]
- Hu, Y.; Wang, H.; Sheikhnejad, O.; Xiong, Y.; Gu, H.; Zhu, P.; Li, G.; Sun, R.; Wong, C.-P. Stretchable and printable medical dry electrode arrays on textile for electrophysiological monitoring. In Proceedings of the 2019 IEEE 69th Electronic Components and Technology Conference (ECTC), Las Vegas, NV, USA, 28–31 May 2019; pp. 243–248. [Google Scholar]
- Guo, L.; Sandsjö, L.; Ortiz-Catalan, M.; Skrifvars, M. Systematic review of textile-based electrodes for long-term and continuous surface electromyography recording. Text. Res. J. 2020, 90, 227–244. [Google Scholar] [CrossRef] [Green Version]
- Lee, S.; Kim, M.-O.; Kang, T.; Park, J.; Choi, Y. Knit band sensor for myoelectric control of surface EMG-based prosthetic hand. IEEE Sens. J. 2018, 18, 8578–8586. [Google Scholar] [CrossRef]
- Lorussi, F.; Carbonaro, N.; De Rossi, D.; Paradiso, R.; Veltink, P.; Tognetti, A. Wearable textile platform for assessing stroke patient treatment in daily life conditions. Front. Bioeng. Biotechnol. 2016, 4, 28. [Google Scholar] [CrossRef]
- Alizadeh-Meghrazi, M.; Sidhu, G.; Jain, S.; Stone, M.; Eskandarian, L.; Toossi, A.; Popovic, M.R. A mass-producible washable smart garment with embedded textile EMG electrodes for control of myoelectric prostheses: A pilot study. Sensors 2022, 22, 666. [Google Scholar] [CrossRef] [PubMed]
- Lee, S.; Jamil, B.; Kim, S.; Choi, Y. Fabric vest socket with embroidered electrodes for control of myoelectric prosthesis. Sensors 2020, 20, 1196. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Pitou, S.; Wu, F.; Shafti, A.; Michael, B.; Stopforth, R.; Howard, M. Embroidered electrodes for control of affordable myoelectric prostheses. In Proceedings of the International Conference on Robotics and Automation, Brisbane, UK, 21–25 May 2018; pp. 1812–1817. [Google Scholar]
- Paul, G.; Torah, R.; Beeby, S.; Tudor, J. The development of screen printed conductive networks on textiles for biopotential monitoring applications. Sens. Actuators A Phys. 2014, 206, 35–41. [Google Scholar] [CrossRef]
- Achilli, A.; Bonfiglio, A.; Pani, D. Design and characterization of screen-printed textile electrodes for ECG monitoring. IEEE Sens. J. 2018, 18, 4097–4107. [Google Scholar] [CrossRef]
- Pani, D.; Achilli, A.; Spanu, A.; Bonfiglio, A.; Gazzoni, M.; Botter, A. Validation of polymer-based screen-printed textile electrodes for surface EMG detection. IEEE Trans. Neural Syst. Rehabil. Eng. 2019, 27, 1370–1377. [Google Scholar] [CrossRef] [PubMed]
- Cerone, G.L.; Botter, A.; Vieira, T.; Gazzoni, M. Design and characterization of a textile electrode system for the detection of high-density sEMG. IEEE Trans. Neural Syst. Rehabil. Eng. 2021, 29, 1110–1119. [Google Scholar] [CrossRef] [PubMed]
- Cattarello, P.; Merletti, R. Characterization of dry and wet electrode-skin interfaces on different skin treatments for HDsEMG. In Proceedings of the 2016 IEEE International Symposium on Medical Measurements and Applications (MeMeA), Benevento, Italy, 15–18 May 2016; pp. 1–6. [Google Scholar]
- Paul, G.M.; Cao, F.; Torah, R.; Yang, K.; Beeby, S.; Tudor, J. A smart textile based facial EMG and EOG computer interface. IEEE Sens. J. 2014, 14, 393–400. [Google Scholar] [CrossRef]
- Komolafe, A.O.; Nunes-Matos, H.; Glanc-Gostkiewicz, M.; Torah, R.N. Evaluating the effect of textile material and structure for printable and wearable e-textiles. IEEE Sens. J. 2021, 21, 18263–18270. [Google Scholar] [CrossRef]
- Yang, K.; Freeman, C.; Torah, R.; Beeby, S.; Tudor, J. Screen printed fabric electrode array for wearable functional electrical stimulation. Sens. Actuators A Phys. 2014, 213, 108–115. [Google Scholar] [CrossRef] [Green Version]
- Ohtsuki, R.; Sakamaki, T.; Tominaga, S. Analysis of skin surface roughness by visual assessment and surface measurement. Opt. Rev. 2013, 20, 94–101. [Google Scholar] [CrossRef]
- Phinyomark, A.; Khushaba, R.N.; Scheme, E. Feature extraction and selection for myoelectric control based on wearable EMG sensors. Sensors 2018, 18, 1615. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Englehart, K.; Hudgins, B. A robust, real-time control scheme for multifunction myoelectric control. IEEE Trans. Biomed. Eng. 2003, 50, 848–854. [Google Scholar] [CrossRef] [PubMed]
- Oliveira, C.C.; da Silva, J.M.; Trindade, I.G.; Martins, F. Characterization of the electrode-skin impedance of textile electrodes. In Proceedings of the 2014 29th Conference on Design of Circuits and Integrated Systems, DCIS, Madrid, Spain, 26–29 November 2014; pp. 7–12. [Google Scholar]
- Understanding Lead-Off Detection in ECG. Available online: https://www.ti.com/lit/an/sbaa196a/sbaa196a.pdf (accessed on 15 November 2022).
- Murciego, L.P.; Henrich, M.C.; Spaich, E.G.; Dosen, S. Reducing the number of EMG electrodes during online hand gesture classification with changing wrist positions. J. Neuroeng. Rehabil. 2022, 19, 78. [Google Scholar] [CrossRef] [PubMed]
- Farina, D.; Lorrain, T.; Negro, F.; Jiang, N. High-density EMG E-textile systems for the control of active prostheses. In Proceedings of the 2010 Annual International Conference of the IEEE Engineering in Medicine and Biology, Buenos Aires, Argentina, 31 August–4 September 2010; pp. 3591–3593. [Google Scholar]
- Rojas-Martínez, M.; Mañanas, M.A.; Alonso, J.F. High-density surface EMG maps from upper-arm and forearm muscles. J. Neuroeng. Rehabil. 2012, 9, 85. [Google Scholar] [CrossRef] [Green Version]
- Olsson, A.E.; Sager, P.; Andersson, E.; Björkman, A.; Malešević, N.; Antfolk, C. Extraction of multi-labelled movement information from the raw HD-sEMG image with time-domain depth. Sci. Rep. 2019, 9, 7244. [Google Scholar] [CrossRef]
- Martinez, I.J.R.; Mannini, A.; Clemente, F.; Sabatini, A.M.; Cipriani, C. Grasp force estimation from the transient EMG using high-density surface recordings. J. Neural Eng. 2020, 17, 16052. [Google Scholar] [CrossRef]
- Franzke, A.W.; Kristoffersen, M.B.; Jayaram, V.; van der Sluis, C.K.; Murgia, A.; Bongers, R.M. Exploring the relationship between EMG feature space characteristics and control performance in machine learning myoelectric control. IEEE Trans. Neural Syst. Rehabil. Eng. 2020, 29, 21–30. [Google Scholar] [CrossRef]
- Geng, Y.; Zhang, X.; Zhang, Y.-T.; Li, G. A novel channel selection method for multiple motion classification using high-density electromyography. Biomed. Eng. Online 2014, 13, 102. [Google Scholar] [CrossRef] [Green Version]
- Moin, A.; Zhou, A.; Rahimi, A.; Benatti, S.; Menon, A.; Tamakloe, S.; Ting, J.; Yamamoto, N.; Khan, Y.; Burghardt, F.; et al. An EMG gesture recognition system with flexible high-density sensors and brain-inspired high-dimensional classifier. In Proceedings of the IEEE International Symposium on Circuits and Systems (ISCAS), Florence, Italy, 27–30 May 2018; Volume 2018, pp. 1–5. [Google Scholar]
- Tam, S.; Boukadoum, M.; Campeau-Lecours, A.; Gosselin, B. Intuitive real-time control strategy for high-density myoelectric hand prosthesis using deep and transfer learning. Sci. Rep. 2021, 11, 11275. [Google Scholar] [CrossRef]
- Yang, G.; Deng, J.; Pang, G.; Zhang, H.; Li, J.; Deng, B.; Pang, Z.; Xu, J.; Jiang, M.; Liljeberg, P.; et al. An IoT-enabled stroke rehabilitation system based on smart wearable armband and machine learning. J. Transl. Eng. Health Med. 2018, 6, 1–10. [Google Scholar] [CrossRef]
- Fleming, A.; Stafford, N.; Huang, S.; Hu, X.; Ferris, D.P.; Huang, H.H. Myoelectric control of robotic lower limb prostheses: A review of electromyography interfaces, control paradigms, challenges and future directions. J. Neural Eng. 2021, 18, 4. [Google Scholar] [CrossRef] [PubMed]













Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Murciego, L.P.; Komolafe, A.; Peřinka, N.; Nunes-Matos, H.; Junker, K.; Díez, A.G.; Lanceros-Méndez, S.; Torah, R.; Spaich, E.G.; Dosen, S. A Novel Screen-Printed Textile Interface for High-Density Electromyography Recording. Sensors 2023, 23, 1113. https://doi.org/10.3390/s23031113
Murciego LP, Komolafe A, Peřinka N, Nunes-Matos H, Junker K, Díez AG, Lanceros-Méndez S, Torah R, Spaich EG, Dosen S. A Novel Screen-Printed Textile Interface for High-Density Electromyography Recording. Sensors. 2023; 23(3):1113. https://doi.org/10.3390/s23031113
Chicago/Turabian StyleMurciego, Luis Pelaez, Abiodun Komolafe, Nikola Peřinka, Helga Nunes-Matos, Katja Junker, Ander García Díez, Senentxu Lanceros-Méndez, Russel Torah, Erika G. Spaich, and Strahinja Dosen. 2023. "A Novel Screen-Printed Textile Interface for High-Density Electromyography Recording" Sensors 23, no. 3: 1113. https://doi.org/10.3390/s23031113