
Optimal PI-Controller-Based Hybrid Energy Storage System in DC Microgrid
 , ,
, ,  , ,
, ,  , ,
, ,  and
and 
Abstract
:1. Introduction
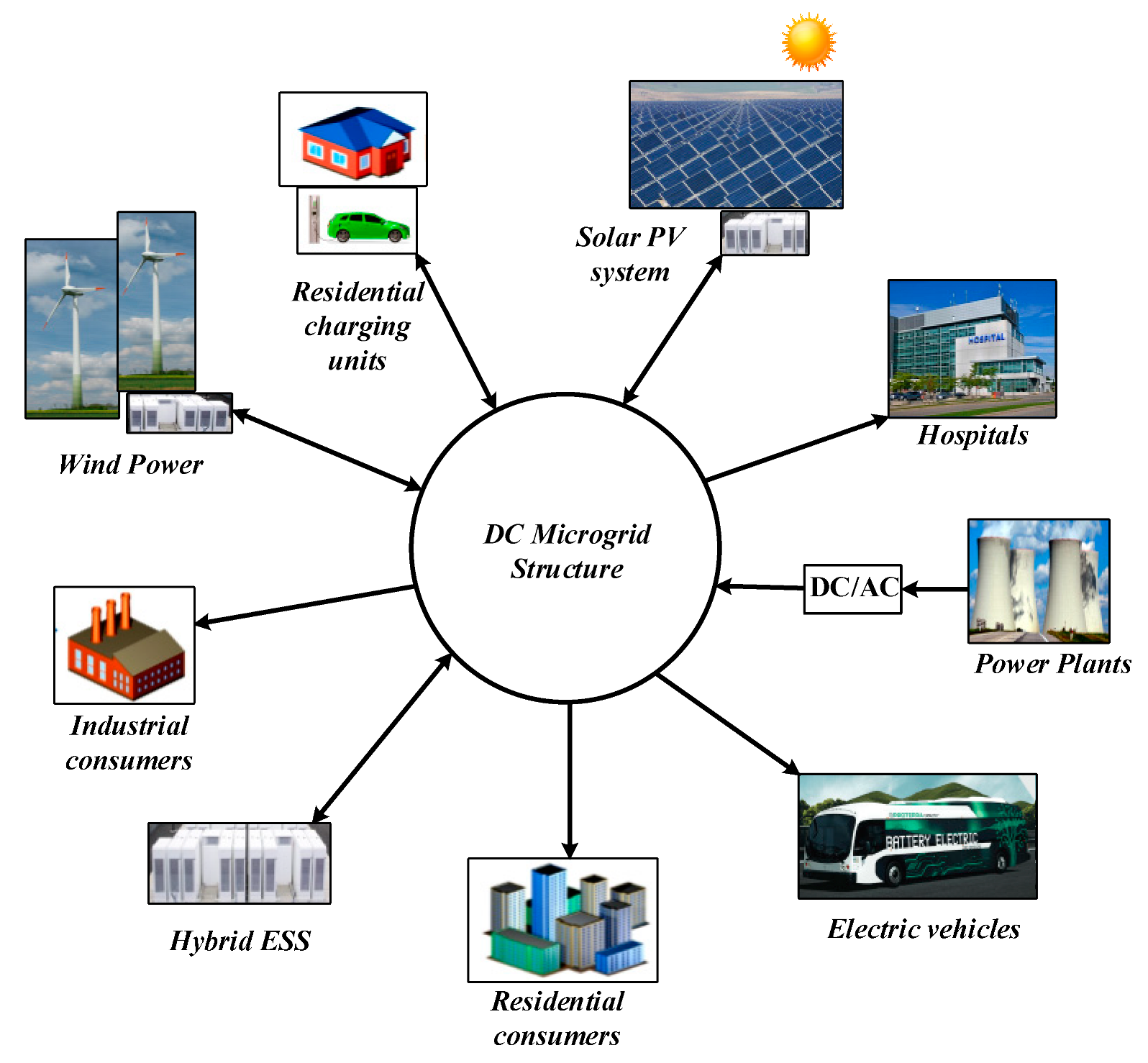
2. System Configuration and Design
2.1. Converter Design
2.2. Small-Signal Analysis of Boost Converter
3. Mathematical Modeling
3.1. Battery Model
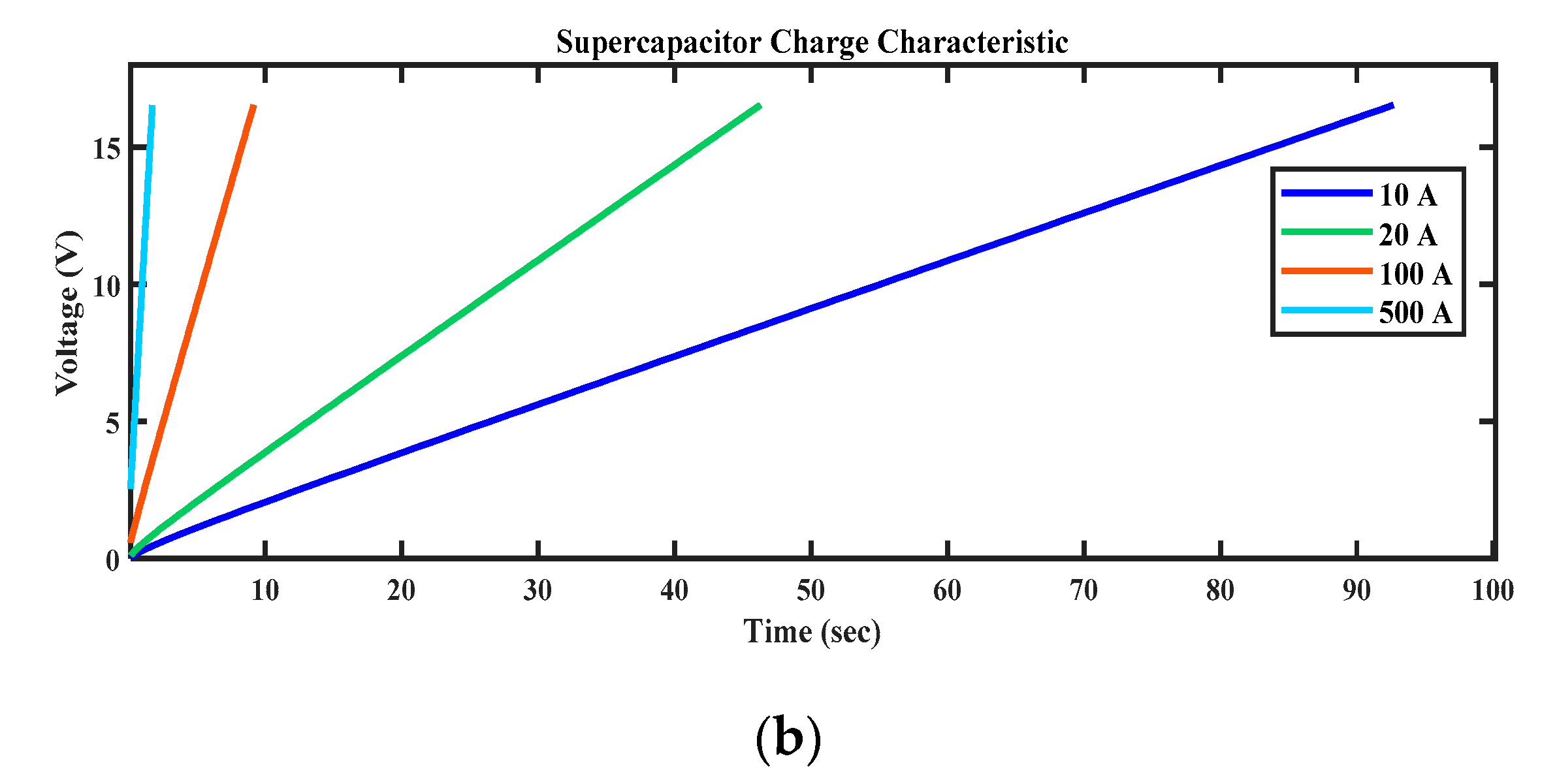
3.2. Supercapacitor Model
3.3. Controller Design
3.4. PSO Algorithm
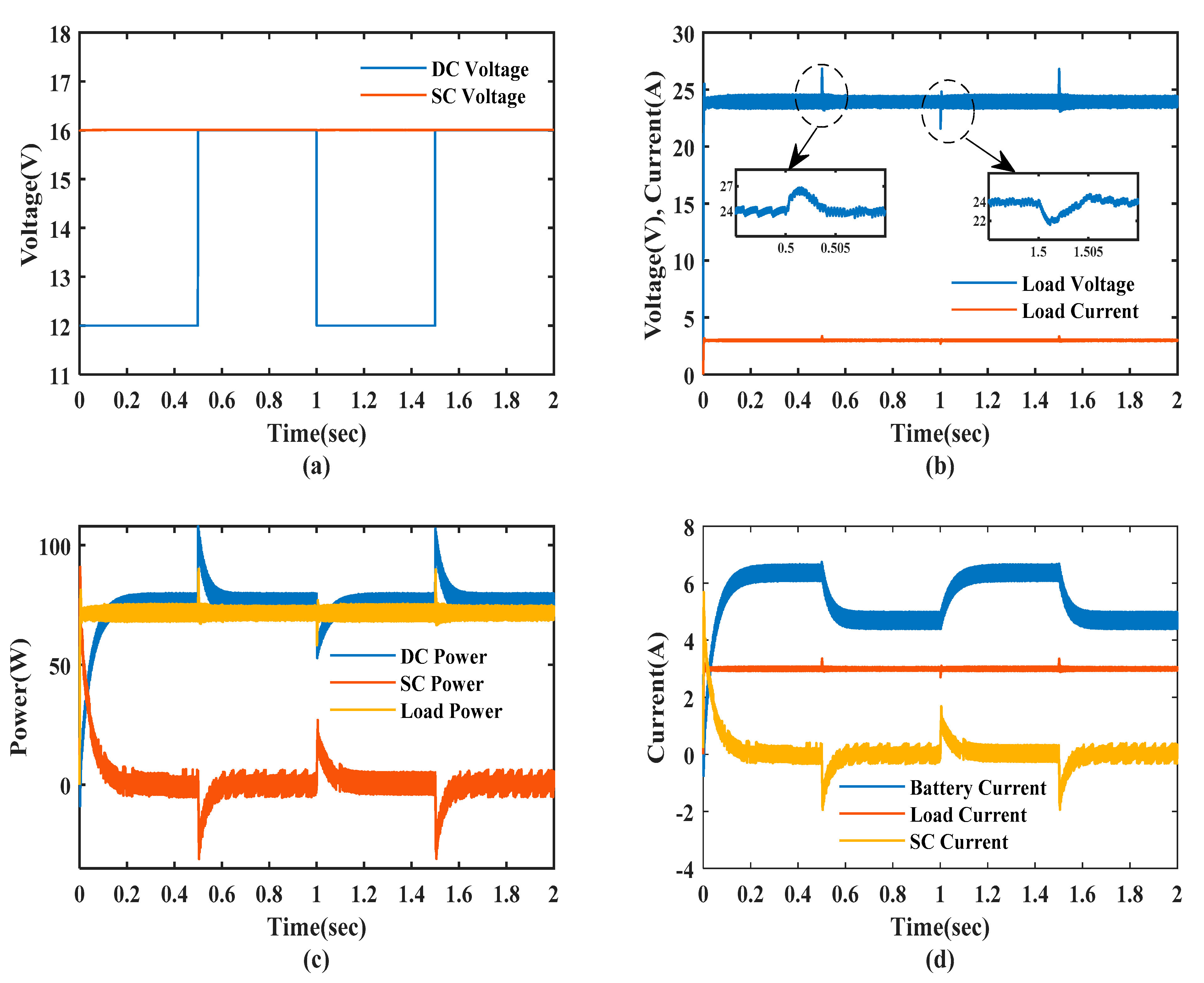
4. Results and Discussions
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ortuzar, M.; Moreno, J.; Dixon, J. Ultracapacitor-Based Auxiliary Energy System for an Electric Vehicle: Implementation and Evaluation. IEEE Trans. Ind. Electron. 2007, 54, 2147–2156. [Google Scholar] [CrossRef]
- Song, M.-S.; Son, Y.-D.; Lee, K.-H. Non-isolated Bidirectional Soft-switching SEPIC/ZETA Converter with Reduced Ripple Currents. J. Power Electron. 2014, 14, 649–660. [Google Scholar] [CrossRef] [Green Version]
- Bayat, H.; Yazdani, A. A Hybrid MMC-Based Photovoltaic and Battery Energy Storage System. IEEE Power Energy Technol. Syst. J. 2019, 6, 32–40. [Google Scholar] [CrossRef]
- Ibanez, F.M.; Florez, A.M.B.; Gutierrez, J.S.; Echeverrria, J.M. Extending the Autonomy of a Battery for Electric Motorcycles. IEEE Trans. Veh. Technol. 2019, 68, 3294–3305. [Google Scholar] [CrossRef]
- Choudhury, T.R.; Nayak, B.; De, A.; Santra, S.B. A comprehensive review and feasibility study of DC-DC converters for different PV applications: ESS, future residential purpose. EV Charg. Energy Syst. 2020, 11, 641–671. [Google Scholar] [CrossRef]
- Dougal, R.A.; Liu, S.; White, R.E. Power and life extension of battery, ultracapacitor hybrids. IEEE Trans. Compon. Packag. Technol. 2002, 25, 120–131. [Google Scholar] [CrossRef] [Green Version]
- Lu, D.; Fakham, H.; Zhou, T.; Francois, B. Application of petri nets for the energy management of a photovoltaic based power station including storage units. Renew. Energy 2010, 35, 1117–1124. [Google Scholar] [CrossRef]
- Garcia, O.; Zumel, P.; de Castro, A.; Cobos, A. Automotive DC-DC bidirectional converter made with many interleaved buck stages. IEEE Trans. Power Electron. 2006, 21, 578–586. [Google Scholar] [CrossRef]
- Zhao, B.; Song, Q.; Liu, W.; Sun, Y. Overview of dual-activebridge isolated bidirectional DC–DC converter for high-frequency-link power-conversion system. IEEE Trans. Power Electron. 2014, 29, 4091–4106. [Google Scholar] [CrossRef]
- Lahyani, A.; Venet, P.; Guermazi, A.; Troudi, A. Battery/Supercapacitors Combination in UPS. IEEE Trans. Power Electron. 2013, 28, 1509–1522. [Google Scholar] [CrossRef]
- Vazquez, S.; Lukic, S.M.; Galvan, E.; Franquelo, L.G.; Carrasco, J.M. Energy storage systems for transport and grid applications. IEEE Trans. Ind. Electron. 2010, 57, 3881–3895. [Google Scholar] [CrossRef] [Green Version]
- Kollimalla, S.K.; Mishra, M.K.; Ukil, A.; Gooi, H.B. DC grid voltage regulation using new HESS control strategy. IEEE Trans. Sustain. Energy 2016, 8, 772–781. [Google Scholar] [CrossRef]
- Kanchev, H.; Lu, D.; Colas, F.; Lazarov, V.; Francois, B. Energy Management and Operational Planning of a Microgrid With a PV-Based Active Generator for Smart Grid Applications. IEEE Trans. Ind. Electron. 2011, 58, 4583–4592. [Google Scholar] [CrossRef] [Green Version]
- Arunkumar, C.R.; Manthati, U.B. Design and Small Signal Modeling of Battery-Supercapacitor HESS for DC Microgrid. In Proceedings of the TENCON 2019–2019 IEEE Region 10 Conference (TENCON), Kochi, India, 17–20 October 2019; pp. 2216–2221. [Google Scholar]
- Tummuru, N.R.; Mishra, M.K.; Srinivas, S. Dynamic energy management of HESS with high-gain PV converter. IEEE Trans. Energy Convers. 2015, 30, 150–160. [Google Scholar] [CrossRef]
- Kim, S.; Chou, P.H. Energy Harvesting with Supercapacitor-Based Energy Storage. In Smart Sensors and Systems; Springer: Cham, Switzerland, 2015; pp. 215–241. [Google Scholar]
- Huang, W.; Abu Qahouq, J.A. Energy Sharing Control Scheme for State-of-Charge Balancing of Distributed Battery Energy Storage System. IEEE Trans. Ind. Electron. 2014, 62, 2764–2776. [Google Scholar] [CrossRef]
- Hredzak, B.; Agelidis, V.G.; Demetriades, G.D. A Low Complexity Control System for a Hybrid DC Power Source Based on Ultracapacitor–Lead–Acid Battery Configuration. IEEE Trans. Power Electron. 2013, 29, 2882–2891. [Google Scholar] [CrossRef]
- Rani, B.I.; Ilango, G.S.; Nagamani, C. Control Strategy for Power Flow Management in a PV System Supplying DC Loads. IEEE Trans. Ind. Electron. 2012, 60, 3185–3194. [Google Scholar] [CrossRef]
- García, P.; Torreglosa, J.P.; Fernández, L.M.; Jurado, F. Optimal energy management system for stand-alone wind turbine/photovoltaic/hydrogen/battery hybrid system with supervisory control based on fuzzy logic. Int. J. Hydrogen Energy 2013, 38, 14146–14158. [Google Scholar] [CrossRef]
- Mardani, M.M.; Khooban, M.H.; Masoudian, A.; Dragicevic, T. Model Predictive Control of DC–DC Converters to Mitigate the Effects of Pulsed Power Loads in Naval DC Microgrids. IEEE Trans. Ind. Electron. 2018, 66, 5676–5685. [Google Scholar] [CrossRef] [Green Version]
- Manandhar, U.; Tummuru, N.R.; Kollimalla, S.K.; Ukil, A.; Beng, G.H.; Chaudhari, K. Validation of Faster Joint Control Strategy for Battery- and Supercapacitor-Based Energy Storage System. IEEE Trans. Ind. Electron. 2017, 65, 3286–3295. [Google Scholar] [CrossRef]
- Abdelmalek, S.; Dali, A.; Bettayeb, M.; Bakdi, A. A new effective robust nonlinear controller based on PSO for interleaved DC–DC boost converters for fuel cell voltage regulation. Soft Comput. 2020, 24, 17051–17064. [Google Scholar] [CrossRef]
- Arunkumar, C.R.; Manthati, U.B.; Srinivas, P. Accurate modelling and analysis of battery–supercapacitor hybrid energy storage system in DC microgrid systems. Energy Syst. 2021, 13, 1055–1073. [Google Scholar] [CrossRef]
- Scarabaggio, P.; Carli, R.; Dotoli, M. Noncooperative Equilibrium Seeking in Distributed Energy Systems Under AC Power Flow Nonlinear Constraints. IEEE Trans. Control Netw. Syst. 2022, 1–12. [Google Scholar] [CrossRef]
- Carli, R.; Cavone, G.; Pippia, T.; De Schutter, B.; Dotoli, M. Robust Optimal Control for Demand Side Management of Multi-Carrier Microgrids. IEEE Trans. Autom. Sci. Eng. 2022, 19, 1338–1351. [Google Scholar] [CrossRef]
- Karimi, H.; Jadid, S. Optimal energy management for multi-microgrid considering demand response programs: A stochastic multi-objective framework. Energy 2020, 195, 116992. [Google Scholar] [CrossRef]
- Yao, M.; Molzahn, D.K.; Mathieu, J.L. An Optimal Power-Flow Approach to Improve Power System Voltage Stability Using Demand Response. IEEE Trans. Control Netw. Syst. 2019, 6, 1015–1025. [Google Scholar] [CrossRef]
- Talukder, S. Mathematicle Modelling and Applications of Particle Swarm Optimization. Master’s Thesis, Mathematical Modelling and Simulation. Blekinge Institute of Technology, Karlskrona, Sweden, 2011. Thesis No.: 2010:8. [Google Scholar]
- Mathworks. Implement Generic Battery Model-Simulink-MathWorks United Kingdom. Available online: http://www.mathworks.co.uk/help/physmod/powersys/ref/battery.html (accessed on 9 February 2020).
- Tremblay, O.; Dessaint, L.-A. Experimental Validation of a Battery Dynamic Model for EV Applications. World Electr. Veh. J. 2009, 3, 289–298. [Google Scholar] [CrossRef] [Green Version]
- Mathworks. Implement Generic Supercapacitor Model-Simulink-MathWorks India. Available online: https://in.mathworks.com/help/physmod/sps/powersys/ref/supercapacitor.html (accessed on 9 February 2020).
- Oldham, K.B. A Gouy–Chapman–Stern model of the double layer at a (metal)/(ionic liquid) interface. J. Electroanal. Chem. 2008, 613, 131–138. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Battery | Supercapacitor |
|---|---|---|
| Recharge cycle lifetime | < cycles | > cycles |
| Self-discharge rate | 5% | 30% |
| Voltage | 3.7 V–4.2 V | 0 V–2.7 V |
| Energy density (Wh/kg) | High (20–150) | Low (0.8–10) |
| Power density (W/kg) | Low (50–300) | High (500–400) |
| Fastest charging time | Hours | s~min |
| Fastest discharging time | 0.3~3 h | <a few min |
| Charging circuit | Complex | Simple |
| System Parameters | Values |
|---|---|
| Battery voltage (Vb) | 12 V |
| SC voltage (VSC) | 16 V |
| Load resistance (RL) | 8 Ω |
| Inductance of battery converter (Lb) | 2 mH |
| Inductance of SC converter (LS) | 1.8 mH |
| Output capacitor filter values (Co) | 250 μF |
| Power output (Pdc) | 72 W |
| Switching frequency (fs) | 20 kHz |
| Output voltage (Vdc) | 24 V |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vijayan, M.; Udumula, R.R.; Mahto, T.; Lokeshgupta, B.; Goud, B.S.; Kalyan, C.N.S.; Balachandran, P.K.; C, D.; Padmanaban, S.; Twala, B. Optimal PI-Controller-Based Hybrid Energy Storage System in DC Microgrid. Sustainability 2022, 14, 14666. https://doi.org/10.3390/su142214666
Vijayan M, Udumula RR, Mahto T, Lokeshgupta B, Goud BS, Kalyan CNS, Balachandran PK, C D, Padmanaban S, Twala B. Optimal PI-Controller-Based Hybrid Energy Storage System in DC Microgrid. Sustainability. 2022; 14(22):14666. https://doi.org/10.3390/su142214666
Chicago/Turabian StyleVijayan, Maya, Ramanjaneya Reddy Udumula, Tarkeshwar Mahto, Bhamidi Lokeshgupta, B Srikanth Goud, Ch Naga Sai Kalyan, Praveen Kumar Balachandran, Dhanamjayulu C, Sanjeevikumar Padmanaban, and Bhekisipho Twala. 2022. "Optimal PI-Controller-Based Hybrid Energy Storage System in DC Microgrid" Sustainability 14, no. 22: 14666. https://doi.org/10.3390/su142214666