
Abstract
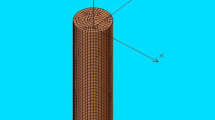
Virtual simulation is an economical and efficient method in mechanical system design. Numerical modeling of a spar platform, tethered by a mooring cable with a spherical joint is developed for the dynamic simulation of the floating structure in ocean. The geometry modeling of the spar is created using finite element methods. The submerged part of the spar bears the buoyancy, hydrodynamic drag force, and effect of the added mass and Froude-Krylov force. Strip theory is used to sum up the forces acting on the elements. The geometry modeling of the cable is established based on the lumped-mass-and-spring modeling through which the cable is divided into 10 elements. A new element-fixed local frame is used, which is created by the element orientation vector and relative velocity of the fluid, to express the loads acting on the cable. The bottom of the cable is fixed on the seabed by spring forces, while the top of the cable is connected to the bottom of the spar platform by a modified spherical joint. This system suffers the propagating wave and current in the X-direction and the linear wave theory is applied for setting of the propagating wave. Based on the numerical modeling, the displacement-load relationships are analyzed, and the simulation results of the numerical modeling are compared with those by the commercial simulation code, ProteusDS. The comparison indicates that the numerical modeling of the spar platform tethered by a mooring cable is well developed, which provides an instruction for the optimization of a floating structure tethered by a mooring cable system.
Similar content being viewed by others

References
JOHNSON K R, KERR S, SIDE J C. Marine renewable and coastal communities-experiences from the offshore oil industry in the 1970s and their relevance to marine renewables in the 2010s[J]. Marine Policy, 2013, 38: 491–499.
DRISCOLL F R, LUECK R G, NAHON M. Development and validation of a lumped-mass dynamics model of a deep-sea ROV system[J]. Applied Ocean Research, 2000, 22: 169–182.
MERCHANT H C, KELF M A. Non-linear analysis of submerged ocean buoy systems[C]//Proceedings of MTS/IEEE Oceans 73, 1973, 1: 390–395.
OGIHARA K. Theoretical analysis on the transverse motion of a buoy by surface wave[J]. Applied Ocean Research, 1980, 2(2): 51–56.
DRISCOLL R, NAHON M. Mathematical modeling and simulation of a moored buoy system[J]. IEEE, 1996: 517–523.
AGARWAL A K, JAIN A K. Dynamic behavior of offshore spar platforms under regular sea waves[J]. Ocean Engineering, 2003, 30: 487–516.
IDRIS K, LEONARD J W, YIM S C S. Coupled dynamics of tethered buoy system[J]. Ocean Engineering, 1997, 24(5): 445–464.
RADHAKRISHNAN S, DATLA R, HIRES R I. Theoretical and experimental analysis of tethered buoy instability in gravity waves[J]. Ocean Engineering, 2007, 34: 261–274.
VERITAS D N. Numerical models for SPAR platform dynamics[C]// Proceeding of the thirteenth(2003) international offshore and polar engineering conference, Honolulu, Hawaii, USA, May 25–30, 2003.
KOO B J, KIM M H, RANDALL R E. Mathieu instability of spar platform with mooring and risers[J]. Ocean Engineering, 2004, 31: 2175–2208.
ZHU X Q, KIM H W, YOO W S. Dynamic analysis of an offshore wind turbine with a spar-type platform[C]//Proceedings of 6th Asian Conference on Multibody Dynamic, Shanghai, China, Aug. 26–30, 2012.
JONKMAN J. Definition of the floating system for phase IV of OC3[R]. Technical Report NREL/TP–500–47535, 2010.
ZHU X Q, BAUCHAU O A, YOO W S. Dynamic analysis of mooring cable fastening a floating sphere on the ocean[C]//Proceedings of ASME 2013 International Design Engineering Technical Conferences & Computers and Information in Engineering Conference, Portland, Oregon, USA, August 4–7, 2013, 12693.
ZHU X Q, YOO W S. New construction of reference frame for underwater cable[C]//Proceeding of the ASME 2014 33rd international conference on Ocean, offshore and Arctic Engineering OMAE2014, San Francisco, California, USA, June 8–13, 2014, 24297.
JOURNEE J M J, MASSIE W W. Offshore hydromechanics[M]. 1st ed. Delft: Delft University of Technology, 2001.
DSA PACIFIC, ProteusDS 2013 manual[R]. Dynamic System Analysis Ltd, 2013.
DSA PACIFIC, ProteusDS theory and validation[R]. Dynamic System Analysis Ltd, 2014.
BAUCHAU O A. Flexible multibody dynamics[M]. Netherlands: Springer Science + Business Media B.V., 2011.
WALTON T S, POLACHEK H. Calculation of transient motion of submerged cables[J]. Mathematics of Computation, 1960, 14(69): 27–46.
BUCKHAM B J. Dynamics modeling of low-tension tethers for submerged remotely operated vehicles[D]. A thesis submitted in partial fulfillment of the requirements for the degree of Doctor of Philosophy in Department of Mechanical Engineering, University of Victoria, 2003.
PARK H H. A tension measurement method of a towing cable or a buoy cable[J]. Ocean Engineering, 1993, 20 (2): 163–170.
HUANG S. Dynamic analysis of three-dimensional marine cable[J]. Ocean Engineering, 1994, 21(6): 587–605.
NIKAVESH P E. Computer-aided analysis of mechanical systems[M]. Upper Saddle River: Prentice-Hall, Inc., 1988.
SHABANA A A. Computational dynamics[M]. 3rd ed. Hoboken: John Wiley & Sons, Inc., 2010.
GREENWOOD D T. Principles of dynamics[M]. 2nd ed. Upper Saddle River: Prentice-Hall, Inc., 1988.
Author information
Authors and Affiliations
Corresponding author
Additional information
Supported by Human Resources Development Program of Korea Institute of Energy Technology Evaluation and Planning(KETEP), Ministry of Trade, Industry and Energy of Korea(Grant No. 20134030200290)
ZHU Xiangqian, born in 1987, is currently a PhD candidate at Computer Aided Engineering Laboratory, Pusan National University, Korea. He received his master degree from Pusan National University, South Korea, in 2010. His research interests include dynamics of flexible multibody system, ocean engineering, and numerical modeling of floating platform.
YOO Wan-Suk, born in 1954, is currently a professor and the director at NRL (National Research Laboratory) of Computer Aided Engineering, Pusan National University, Korea. His main research interests include dynamics of flexible multibody system, vehicle dynamics, dynamics simulation and application.
Rights and permissions
About this article

Cite this article
Zhu, X., Yoo, WS. Numerical modeling of a spar platform tethered by a mooring cable. Chin. J. Mech. Eng. 28, 785–792 (2015). https://doi.org/10.3901/CJME.2015.0206.054
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.3901/CJME.2015.0206.054